

A silkier control algorithm than PID & Carnegie Mellon University


MPC control algorithm, the full name is Model Predictive Control (Model Predictive Control), is a control technology based on the system dynamic model. It works by predicting the future behavior of the system through mathematical models and optimizing the system's control inputs based on these predictions to achieve the desired output. The core idea of the MPC control algorithm is to obtain the best control input by optimizing the prediction results for a period of time in the future in each control cycle. This optimization is based on some prediction results to optimize the control input of the system to achieve the desired output. The MPC control algorithm is widely used and is especially suitable for control systems that need to satisfy some constraints. By combining system models and optimization techniques, MPC can be used in different industries. The core of the MPC control algorithm lies in its prediction model, which can predict the future system state based on the current state information of the system. The form of the prediction model is not fixed and can be a state space equation, transfer function, step response model, impulse response model, fuzzy model, etc. The specific form depends on the controlled object and the state that needs to be predicted.
TinyMPC is an open source solver tailored for convex model predictive control, providing high-speed calculations. TinyMPC is implemented in C++ with minimal dependencies and is particularly suitable for embedded control and robotics applications on asset-constrained platforms. TinyMPC can handle state and input boundaries as well as second-order constraints. Python, Julia, and MATLAB interfaces are available to help generate code for embedded systems.
Robot DemonstrationTinyMPC provides support for privacy-enhanced computing applications and can be used to bridge the gap between secure multi-party computation and resource-constrained processing platforms. Integrating TinyMPC into robots with insufficient computing power enables them to perform operations quickly and exhibit the advantages of safe execution.
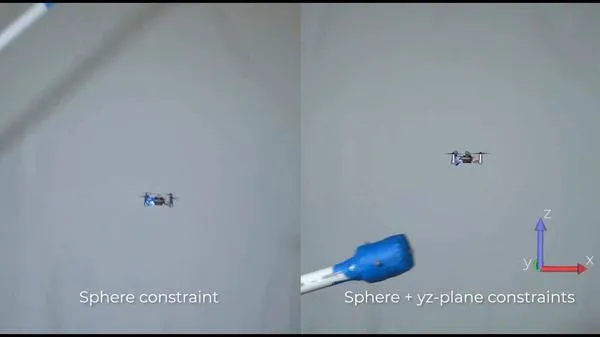
Dynamic Obstacle AvoidanceTinyMPC runs fast enough to relinearize constraints at each time step, allowing it to perform operations on moving obstacles. reasoning. On the left, a virtual sphere centered at the end of the joystick is linearized into a new set of hyperplane constraints at each time step. The algorithm can also handle any number of any meaningful number of arbitrary linear constraints. For example, on the right side, it avoids the end of the stick at the end of the stick while staying in the yz plane.
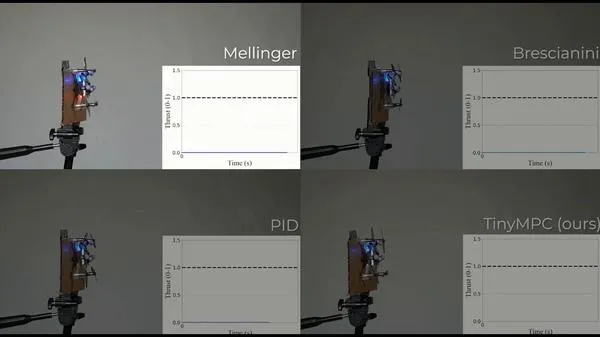
TinyMPC can initiate recovery under extreme conditions. In this example it is compared to the original controller of Crazyflie 2.1. Only TinyMPC can break through control limits and achieve clean recovery operations.
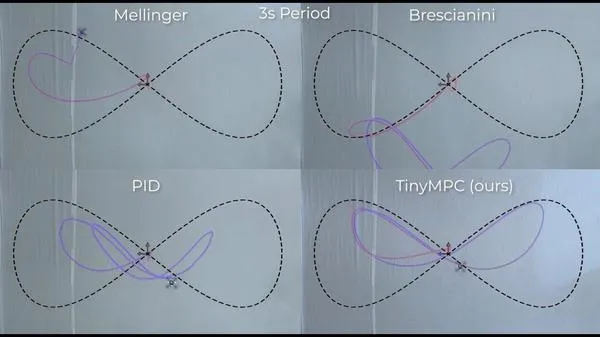
We used the same inventory controller to accomplish the infeasible fast figure-8 tracking task ( The time required to complete a single figure 8 is only possible if the drone is more powerful). TinyMPC and PID are able to stay upright, but TinyMPC's trajectory is closer to a figure-eight shape.
In microcontroller benchmarks, TinyMPC outperforms the best in speed and memory footprint Advanced solver. We solve randomly generated QP-based MPC problems and compare the iteration time and memory footprint with OSQP. TinyMPC's maximum speedup on OSQP is 8x that of OSQP with much less memory.
 #TinyMPC is now also able to handle conic constraints! In (b) we benchmark TinyMPC against two existing cone solvers (SCS and ECOS) with embedded support for the rocket soft landing problem. TinyMPC achieves an average speedup of 13x on SCS and 137x on ECOS.
#TinyMPC is now also able to handle conic constraints! In (b) we benchmark TinyMPC against two existing cone solvers (SCS and ECOS) with embedded support for the rocket soft landing problem. TinyMPC achieves an average speedup of 13x on SCS and 137x on ECOS.
 #Real-time control requires the solver to return a solution within a strict time window. The trajectory tracking performance of TinyMPC was compared with that of SCS and ECOS on the rocket soft landing problem while artificially varying the amount of time available for each solution. TinyMPC has fewer constraint violations and lower tracking errors than SCS and ECOS across all control durations.
#Real-time control requires the solver to return a solution within a strict time window. The trajectory tracking performance of TinyMPC was compared with that of SCS and ECOS on the rocket soft landing problem while artificially varying the amount of time available for each solution. TinyMPC has fewer constraint violations and lower tracking errors than SCS and ECOS across all control durations.
 Algorithm contributor:
Algorithm contributor:
程式碼取得位址:
GitHub - TinyMPC/TinyMPC: Model-predictive control for microcontrollers
The above is the detailed content of A silkier control algorithm than PID & Carnegie Mellon University. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1664
1664
 14
1423
52
1317
25
1268
29
1242
24
14
1423
52
1317
25
1268
29
1242
24

 The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Imagine an artificial intelligence model that not only has the ability to surpass traditional computing, but also achieves more efficient performance at a lower cost. This is not science fiction, DeepSeek-V2[1], the world’s most powerful open source MoE model is here. DeepSeek-V2 is a powerful mixture of experts (MoE) language model with the characteristics of economical training and efficient inference. It consists of 236B parameters, 21B of which are used to activate each marker. Compared with DeepSeek67B, DeepSeek-V2 has stronger performance, while saving 42.5% of training costs, reducing KV cache by 93.3%, and increasing the maximum generation throughput to 5.76 times. DeepSeek is a company exploring general artificial intelligence
 Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas officially enters the era of electric robots! Yesterday, the hydraulic Atlas just "tearfully" withdrew from the stage of history. Today, Boston Dynamics announced that the electric Atlas is on the job. It seems that in the field of commercial humanoid robots, Boston Dynamics is determined to compete with Tesla. After the new video was released, it had already been viewed by more than one million people in just ten hours. The old people leave and new roles appear. This is a historical necessity. There is no doubt that this year is the explosive year of humanoid robots. Netizens commented: The advancement of robots has made this year's opening ceremony look like a human, and the degree of freedom is far greater than that of humans. But is this really not a horror movie? At the beginning of the video, Atlas is lying calmly on the ground, seemingly on his back. What follows is jaw-dropping
 KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
Earlier this month, researchers from MIT and other institutions proposed a very promising alternative to MLP - KAN. KAN outperforms MLP in terms of accuracy and interpretability. And it can outperform MLP running with a larger number of parameters with a very small number of parameters. For example, the authors stated that they used KAN to reproduce DeepMind's results with a smaller network and a higher degree of automation. Specifically, DeepMind's MLP has about 300,000 parameters, while KAN only has about 200 parameters. KAN has a strong mathematical foundation like MLP. MLP is based on the universal approximation theorem, while KAN is based on the Kolmogorov-Arnold representation theorem. As shown in the figure below, KAN has
 Tesla robots work in factories, Musk: The degree of freedom of hands will reach 22 this year!
May 06, 2024 pm 04:13 PM
Tesla robots work in factories, Musk: The degree of freedom of hands will reach 22 this year!
May 06, 2024 pm 04:13 PM
The latest video of Tesla's robot Optimus is released, and it can already work in the factory. At normal speed, it sorts batteries (Tesla's 4680 batteries) like this: The official also released what it looks like at 20x speed - on a small "workstation", picking and picking and picking: This time it is released One of the highlights of the video is that Optimus completes this work in the factory, completely autonomously, without human intervention throughout the process. And from the perspective of Optimus, it can also pick up and place the crooked battery, focusing on automatic error correction: Regarding Optimus's hand, NVIDIA scientist Jim Fan gave a high evaluation: Optimus's hand is the world's five-fingered robot. One of the most dexterous. Its hands are not only tactile
 The latest from Oxford University! Mickey: 2D image matching in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
The latest from Oxford University! Mickey: 2D image matching in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Project link written in front: https://nianticlabs.github.io/mickey/ Given two pictures, the camera pose between them can be estimated by establishing the correspondence between the pictures. Typically, these correspondences are 2D to 2D, and our estimated poses are scale-indeterminate. Some applications, such as instant augmented reality anytime, anywhere, require pose estimation of scale metrics, so they rely on external depth estimators to recover scale. This paper proposes MicKey, a keypoint matching process capable of predicting metric correspondences in 3D camera space. By learning 3D coordinate matching across images, we are able to infer metric relative
 FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
Target detection is a relatively mature problem in autonomous driving systems, among which pedestrian detection is one of the earliest algorithms to be deployed. Very comprehensive research has been carried out in most papers. However, distance perception using fisheye cameras for surround view is relatively less studied. Due to large radial distortion, standard bounding box representation is difficult to implement in fisheye cameras. To alleviate the above description, we explore extended bounding box, ellipse, and general polygon designs into polar/angular representations and define an instance segmentation mIOU metric to analyze these representations. The proposed model fisheyeDetNet with polygonal shape outperforms other models and simultaneously achieves 49.5% mAP on the Valeo fisheye camera dataset for autonomous driving
 Implementing Machine Learning Algorithms in C++: Common Challenges and Solutions
Jun 03, 2024 pm 01:25 PM
Implementing Machine Learning Algorithms in C++: Common Challenges and Solutions
Jun 03, 2024 pm 01:25 PM
Common challenges faced by machine learning algorithms in C++ include memory management, multi-threading, performance optimization, and maintainability. Solutions include using smart pointers, modern threading libraries, SIMD instructions and third-party libraries, as well as following coding style guidelines and using automation tools. Practical cases show how to use the Eigen library to implement linear regression algorithms, effectively manage memory and use high-performance matrix operations.
 Single card running Llama 70B is faster than dual card, Microsoft forced FP6 into A100 | Open source
Apr 29, 2024 pm 04:55 PM
Single card running Llama 70B is faster than dual card, Microsoft forced FP6 into A100 | Open source
Apr 29, 2024 pm 04:55 PM
FP8 and lower floating point quantification precision are no longer the "patent" of H100! Lao Huang wanted everyone to use INT8/INT4, and the Microsoft DeepSpeed team started running FP6 on A100 without official support from NVIDIA. Test results show that the new method TC-FPx's FP6 quantization on A100 is close to or occasionally faster than INT4, and has higher accuracy than the latter. On top of this, there is also end-to-end large model support, which has been open sourced and integrated into deep learning inference frameworks such as DeepSpeed. This result also has an immediate effect on accelerating large models - under this framework, using a single card to run Llama, the throughput is 2.65 times higher than that of dual cards. one
