

機械読み取り可能ゾーン (MRZ) は、現代のパスポート、ビザ、ID カードに採用されている重要な機能です。これには、名前、性別、国コード、文書番号など、文書所有者に関する重要な情報が含まれています。 MRZ の認識は、国境管理、空港のセキュリティ、ホテルのチェックイン プロセスにおいて重要な役割を果たします。このチュートリアルでは、Dynamsoft Capture Vision SDK を利用して、Windows、Linux、および macOS に MRZ 認識を実装する方法を示します。プラットフォーム。このガイドでは、SDK の強力な機能を活用し、クロスプラットフォームの MRZ 検出をシームレスかつ効率的に行うための段階的なアプローチを提供します。
Dynamsoft Capture Vision トライアル ライセンス: Dynamsoft Capture Vision SDK の 30 日間のトライアル ライセンス キーを取得します。
Python パッケージ: 次のコマンドを使用して、必要な Python パッケージをインストールします。
pip install dynamsoft-capture-vision-bundle opencv-python
これらのパッケージは何のためにありますか?
公式 MRZ スキャナーのサンプルは、Dynamsoft Capture Vision SDK を使用して簡単な Python ベースの MRZ リーダーを短時間で作成する方法を示しています。
ソース コードを見て、その機能を分析してみましょう:
import sys
from dynamsoft_capture_vision_bundle import *
import os
class MRZResult:
def __init__(self, item: ParsedResultItem):
self.doc_type = item.get_code_type()
self.raw_text=[]
self.doc_id = None
self.surname = None
self.given_name = None
self.nationality = None
self.issuer = None
self.gender = None
self.date_of_birth = None
self.date_of_expiry = None
if self.doc_type == "MRTD_TD3_PASSPORT":
if item.get_field_value("passportNumber") != None and item.get_field_validation_status("passportNumber") != EnumValidationStatus.VS_FAILED:
self.doc_id = item.get_field_value("passportNumber")
elif item.get_field_value("documentNumber") != None and item.get_field_validation_status("documentNumber") != EnumValidationStatus.VS_FAILED:
self.doc_id = item.get_field_value("documentNumber")
line = item.get_field_value("line1")
if line is not None:
if item.get_field_validation_status("line1") == EnumValidationStatus.VS_FAILED:
line += ", Validation Failed"
self.raw_text.append(line)
line = item.get_field_value("line2")
if line is not None:
if item.get_field_validation_status("line2") == EnumValidationStatus.VS_FAILED:
line += ", Validation Failed"
self.raw_text.append(line)
line = item.get_field_value("line3")
if line is not None:
if item.get_field_validation_status("line3") == EnumValidationStatus.VS_FAILED:
line += ", Validation Failed"
self.raw_text.append(line)
if item.get_field_value("nationality") != None and item.get_field_validation_status("nationality") != EnumValidationStatus.VS_FAILED:
self.nationality = item.get_field_value("nationality")
if item.get_field_value("issuingState") != None and item.get_field_validation_status("issuingState") != EnumValidationStatus.VS_FAILED:
self.issuer = item.get_field_value("issuingState")
if item.get_field_value("dateOfBirth") != None and item.get_field_validation_status("dateOfBirth") != EnumValidationStatus.VS_FAILED:
self.date_of_birth = item.get_field_value("dateOfBirth")
if item.get_field_value("dateOfExpiry") != None and item.get_field_validation_status("dateOfExpiry") != EnumValidationStatus.VS_FAILED:
self.date_of_expiry = item.get_field_value("dateOfExpiry")
if item.get_field_value("sex") != None and item.get_field_validation_status("sex") != EnumValidationStatus.VS_FAILED:
self.gender = item.get_field_value("sex")
if item.get_field_value("primaryIdentifier") != None and item.get_field_validation_status("primaryIdentifier") != EnumValidationStatus.VS_FAILED:
self.surname = item.get_field_value("primaryIdentifier")
if item.get_field_value("secondaryIdentifier") != None and item.get_field_validation_status("secondaryIdentifier") != EnumValidationStatus.VS_FAILED:
self.given_name = item.get_field_value("secondaryIdentifier")
def to_string(self):
msg = (f"Raw Text:\n")
for index, line in enumerate(self.raw_text):
msg += (f"\tLine {index + 1}: {line}\n")
msg+=(f"Parsed Information:\n"
f"\tDocumentType: {self.doc_type or ''}\n"
f"\tDocumentID: {self.doc_id or ''}\n"
f"\tSurname: {self.surname or ''}\n"
f"\tGivenName: {self.given_name or ''}\n"
f"\tNationality: {self.nationality or ''}\n"
f"\tIssuingCountryorOrganization: {self.issuer or ''}\n"
f"\tGender: {self.gender or ''}\n"
f"\tDateofBirth(YYMMDD): {self.date_of_birth or ''}\n"
f"\tExpirationDate(YYMMDD): {self.date_of_expiry or ''}\n")
return msg
def print_results(result: ParsedResult) -> None:
tag = result.get_original_image_tag()
if isinstance(tag, FileImageTag):
print("File:", tag.get_file_path())
if result.get_error_code() != EnumErrorCode.EC_OK:
print("Error:", result.get_error_string())
else:
items = result.get_items()
print("Parsed", len(items), "MRZ Zones.")
for item in items:
mrz_result = MRZResult(item)
print(mrz_result.to_string())
if __name__ == '__main__':
print("**********************************************************")
print("Welcome to Dynamsoft Capture Vision - MRZ Sample")
print("**********************************************************")
error_code, error_message = LicenseManager.init_license("LICENSE-KEY")
if error_code != EnumErrorCode.EC_OK and error_code != EnumErrorCode.EC_LICENSE_CACHE_USED:
print("License initialization failed: ErrorCode:", error_code, ", ErrorString:", error_message)
else:
cvr_instance = CaptureVisionRouter()
while (True):
image_path = input(
">> Input your image full path:\n"
">> 'Enter' for sample image or 'Q'/'q' to quit\n"
).strip('\'"')
if image_path.lower() == "q":
sys.exit(0)
if image_path == "":
image_path = "../Images/passport-sample.jpg"
if not os.path.exists(image_path):
print("The image path does not exist.")
continue
result = cvr_instance.capture(image_path, "ReadPassportAndId")
if result.get_error_code() != EnumErrorCode.EC_OK:
print("Error:", result.get_error_code(), result.get_error_string())
else:
parsed_result = result.get_parsed_result()
if parsed_result is None or len(parsed_result.get_items()) == 0:
print("No parsed results.")
else:
print_results(parsed_result)
input("Press Enter to quit...")
説明
次のセクションでは、OpenCV を使用して MRZ 認識結果を視覚化し、検出された MRZ ゾーンをパスポート画像上に表示します。
In the code above, result is an instance of the CapturedResult class. Calling its get_recognized_text_lines_result() method retrieves a list of TextLineResultItem objects. Each TextLineResultItem object contains the coordinates of the detected text line. Use the following code snippet to extract the coordinates and draw contours on the passport image:
cv_image = cv2.imread(image_path)
line_result = result.get_recognized_text_lines_result()
items = line_result.get_items()
for item in items:
location = item.get_location()
x1 = location.points[0].x
y1 = location.points[0].y
x2 = location.points[1].x
y2 = location.points[1].y
x3 = location.points[2].x
y3 = location.points[2].y
x4 = location.points[3].x
y4 = location.points[3].y
del location
cv2.drawContours(
cv_image, [np.intp([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
cv2.imshow(
"Original Image with Detected MRZ Zone", cv_image)
cv2.waitKey(0)
cv2.destroyAllWindows()

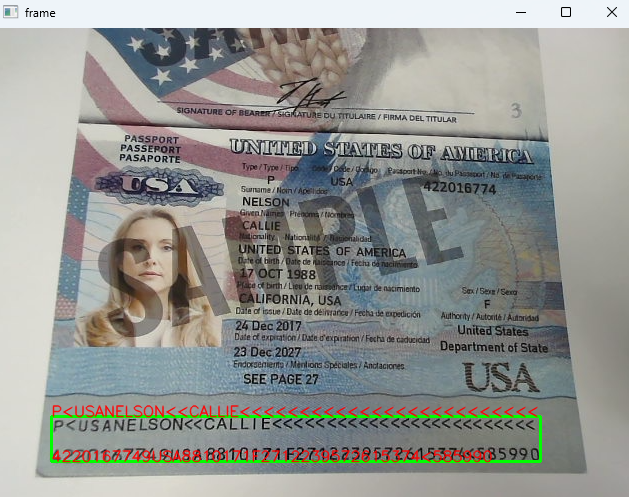
Scanning and recognizing MRZ in real-time via webcam requires capturing a continuous image stream. We can use the OpenCV library to capture frames from the webcam and process them with the Dynamsoft Capture Vision SDK. The following code snippet demonstrates how to implement real-time MRZ recognition using a webcam:
from dynamsoft_capture_vision_bundle import *
import cv2
import numpy as np
import queue
from utils import *
class FrameFetcher(ImageSourceAdapter):
def has_next_image_to_fetch(self) -> bool:
return True
def add_frame(self, imageData):
self.add_image_to_buffer(imageData)
class MyCapturedResultReceiver(CapturedResultReceiver):
def __init__(self, result_queue):
super().__init__()
self.result_queue = result_queue
def on_captured_result_received(self, captured_result):
self.result_queue.put(captured_result)
if __name__ == '__main__':
errorCode, errorMsg = LicenseManager.init_license(
"LICENSE-KEY")
if errorCode != EnumErrorCode.EC_OK and errorCode != EnumErrorCode.EC_LICENSE_CACHE_USED:
print("License initialization failed: ErrorCode:",
errorCode, ", ErrorString:", errorMsg)
else:
vc = cv2.VideoCapture(0)
if not vc.isOpened():
print("Error: Camera is not opened!")
exit(1)
cvr = CaptureVisionRouter()
fetcher = FrameFetcher()
cvr.set_input(fetcher)
# Create a thread-safe queue to store captured items
result_queue = queue.Queue()
receiver = MyCapturedResultReceiver(result_queue)
cvr.add_result_receiver(receiver)
errorCode, errorMsg = cvr.start_capturing("ReadPassportAndId")
if errorCode != EnumErrorCode.EC_OK:
print("error:", errorMsg)
while True:
ret, frame = vc.read()
if not ret:
print("Error: Cannot read frame!")
break
fetcher.add_frame(convertMat2ImageData(frame))
if not result_queue.empty():
captured_result = result_queue.get_nowait()
items = captured_result.get_items()
for item in items:
if item.get_type() == EnumCapturedResultItemType.CRIT_TEXT_LINE:
text = item.get_text()
line_results = text.split('\n')
location = item.get_location()
x1 = location.points[0].x
y1 = location.points[0].y
x2 = location.points[1].x
y2 = location.points[1].y
x3 = location.points[2].x
y3 = location.points[2].y
x4 = location.points[3].x
y4 = location.points[3].y
cv2.drawContours(
frame, [np.intp([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
delta = y3 - y1
for line_result in line_results:
cv2.putText(
frame, line_result, (x1, y1), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 1, cv2.LINE_AA)
y1 += delta
del location
elif item.get_type() == EnumCapturedResultItemType.CRIT_PARSED_RESULT:
mrz_result = MRZResult(item)
print(mrz_result.to_string())
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.imshow('frame', frame)
cvr.stop_capturing()
vc.release()
cv2.destroyAllWindows()
Explanation
https://github.com/yushulx/python-mrz-scanner-sdk/tree/main/examples/official
The above is the detailed content of How to Implement Machine Readable Zone (MRZ) Recognition in Python. For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



