

Dots Simulation using Genetic Algorithm - Part 2

This tutorial enhances a genetic algorithm simulation by adding features like elite highlighting, increased obstacle complexity, a "Reached" counter, and crossover breeding. Let's break down the improvements.
Part 1: Visual Enhancements and Obstacle Complexity
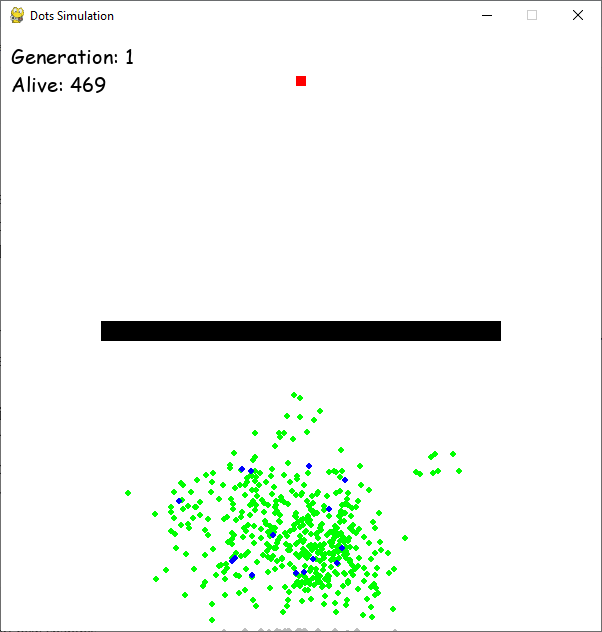
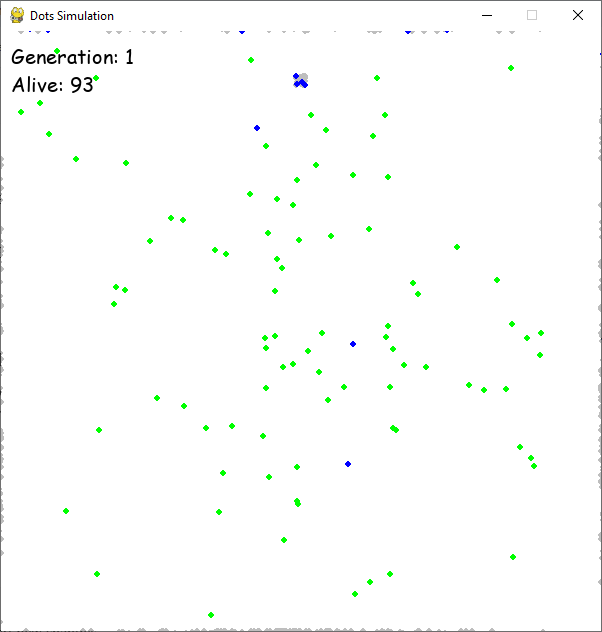
The simulation is upgraded to visually distinguish elite dots (those performing best in the previous generation) by coloring them blue. This is achieved by adding an is_elite boolean parameter to the Dot class's draw method and conditionally applying the blue color. The Population class's draw method is modified to pass this boolean based on whether a dot is in the elites list.
Obstacle generation is refactored for greater flexibility. Obstacle and Goal classes are moved to a separate obstacles.py file, promoting cleaner code organization. A constants.py file is introduced to hold global variables like screen dimensions and population size, preventing redundancy across files. Multiple obstacle configurations (OBSTACLES0, OBSTACLES1, OBSTACLES2, OBSTACLES3, OBSTACLES4, OBSTACLES5) are defined in obstacles.py, allowing easy switching between different challenge levels. The main script imports these configurations and selects the desired one. A check is added to ensure the goal is always present, even when using obstacle lists generated via list comprehensions (like OBSTACLES4).
A "Reached" counter is added to display the number of dots that successfully reached the goal in the previous generation. This is implemented by modifying the generate_next_generation method in the Population class to count and return this value. The main loop then displays this count on the screen.
Part 2: Implementing Single-Point Crossover
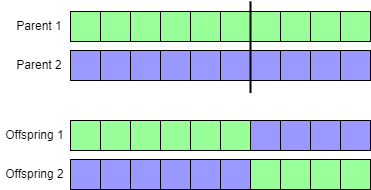
The simulation transitions from replication to single-point crossover for offspring generation. A crossover class method is added to the Dot class. This method takes two parent dots as input, selects a random crossover point, and creates two offspring by combining portions of each parent's movement sequence (represented as a list of direction vectors). The generate_next_generation method is updated to utilize this crossover method, generating pairs of offspring instead of single clones. Mutation continues to be applied to the offspring.
The improved simulation offers enhanced visualization, adjustable difficulty, and a more sophisticated breeding mechanism, making it a more robust and insightful example of a genetic algorithm. Future improvements mentioned include save/load functionality and speed optimization. The author also encourages joining their Discord community for further collaboration.
The above is the detailed content of Dots Simulation using Genetic Algorithm - Part 2. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 How to solve the permissions problem encountered when viewing Python version in Linux terminal?
Apr 01, 2025 pm 05:09 PM
How to solve the permissions problem encountered when viewing Python version in Linux terminal?
Apr 01, 2025 pm 05:09 PM
Solution to permission issues when viewing Python version in Linux terminal When you try to view Python version in Linux terminal, enter python...
 How to avoid being detected by the browser when using Fiddler Everywhere for man-in-the-middle reading?
Apr 02, 2025 am 07:15 AM
How to avoid being detected by the browser when using Fiddler Everywhere for man-in-the-middle reading?
Apr 02, 2025 am 07:15 AM
How to avoid being detected when using FiddlerEverywhere for man-in-the-middle readings When you use FiddlerEverywhere...
 How to teach computer novice programming basics in project and problem-driven methods within 10 hours?
Apr 02, 2025 am 07:18 AM
How to teach computer novice programming basics in project and problem-driven methods within 10 hours?
Apr 02, 2025 am 07:18 AM
How to teach computer novice programming basics within 10 hours? If you only have 10 hours to teach computer novice some programming knowledge, what would you choose to teach...
 How to efficiently copy the entire column of one DataFrame into another DataFrame with different structures in Python?
Apr 01, 2025 pm 11:15 PM
How to efficiently copy the entire column of one DataFrame into another DataFrame with different structures in Python?
Apr 01, 2025 pm 11:15 PM
When using Python's pandas library, how to copy whole columns between two DataFrames with different structures is a common problem. Suppose we have two Dats...
 How does Uvicorn continuously listen for HTTP requests without serving_forever()?
Apr 01, 2025 pm 10:51 PM
How does Uvicorn continuously listen for HTTP requests without serving_forever()?
Apr 01, 2025 pm 10:51 PM
How does Uvicorn continuously listen for HTTP requests? Uvicorn is a lightweight web server based on ASGI. One of its core functions is to listen for HTTP requests and proceed...
 How to handle comma-separated list query parameters in FastAPI?
Apr 02, 2025 am 06:51 AM
How to handle comma-separated list query parameters in FastAPI?
Apr 02, 2025 am 06:51 AM
Fastapi ...
 How to solve permission issues when using python --version command in Linux terminal?
Apr 02, 2025 am 06:36 AM
How to solve permission issues when using python --version command in Linux terminal?
Apr 02, 2025 am 06:36 AM
Using python in Linux terminal...
 How to get news data bypassing Investing.com's anti-crawler mechanism?
Apr 02, 2025 am 07:03 AM
How to get news data bypassing Investing.com's anti-crawler mechanism?
Apr 02, 2025 am 07:03 AM
Understanding the anti-crawling strategy of Investing.com Many people often try to crawl news data from Investing.com (https://cn.investing.com/news/latest-news)...
