
 Web Front-end
JS Tutorial
Javascript image processing—smoothing processing implementation principle_javascript skills
Web Front-end
JS Tutorial
Javascript image processing—smoothing processing implementation principle_javascript skills
Javascript image processing—smoothing processing implementation principle_javascript skills

Foreword
In the last article, we explained the virtual edge of the image. This article starts with smoothing (that is, blurring) processing.
Basic Principles
Here is a direct reference to the relevant content of OpenCV 2.4 C smoothing processing and OpenCV 2.4 C edge gradient calculation:
Smoothing, also called blurring, is a simple and frequently used image processing method.
A filter
is required for smoothing. The most commonly used filter is the linear filter, the output pixel value of the linear filtering process (for example:) is the weighted average of the input pixel value (for example:
, which is just a weighting coefficient.
 ) is the weighted average of the input pixel value (for example:
) is the weighted average of the input pixel value (for example:  ):
):

 is called the kernel
is called the kernel This involves an operation called "convolution", so what is convolution?
Convolution is an operation performed between each image block and a certain operator (kernel).
Nuclear? !
nbsp;dsds
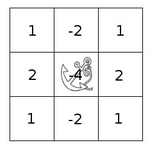
The kernel is a fixed-size numerical array. The array has an anchor point
, which is usually located in the center of the array.
But how does this work?
If you want to get the convolution value at a specific position of the image, you can calculate it with the following method:
Place the anchor point of the kernel on the pixel at that specific position, and at the same time, other values in the kernel coincide with each pixel in the neighborhood of the pixel; multiply each value in the kernel by the corresponding pixel value, and add the products Add; place the result on the pixel corresponding to the anchor point; repeat the above process for all pixels in the image.
The above process is represented by the formula as follows:

What about convolution on the edge of the image?
Before calculating the convolution, you need to create virtual pixels by copying the boundary of the source image, so that there are enough pixels at the edge to calculate the convolution. This is why the previous article required a virtual edge function.
Mean Smoothing
Mean smoothing is actually a convolution operation in which the kernel elements are all 1, and then divided by the size of the kernel. The mathematical expression is:

Let’s implement the mean smoothing function blur:
function blur(__src, __size1, __size2, __borderType, __dst){
if(__src.type && __src.type == "CV_RGBA"){
var height = __src.row,
width = __src. col,
dst = __dst || new Mat(height, width, CV_RGBA),
dstData = dst.data;
var size1 = __size1 || 3,
size2 = __size2 || size1,
size = size1 * size2;
if(size1 % 2 !== 1 || size2 % 2 !== 1){
console.error("size must be an odd number");
return __src;
}
var startX = Math.floor(size1 / 2),
startY = Math.floor(size2 / 2);
var withBorderMat = copyMakeBorder(__src, startY, startX , 0, 0, __borderType),
mData = withBorderMat.data,
mWidth = withBorderMat.col;
var newValue, nowX, offsetY, offsetI;
var i, j, c , y, x;
for(i = height; i--;){
offsetI = i * width;
for(j = width; j--;){
for(c = 3; c--;){
newValue = 0;
for(y = size2; y--;){
offsetY = (y i) * mWidth * 4;
for(x = size1; offsetI) * 4 c] = newValue / size;
}
dstData[(j offsetI) * 4 3] = mData[offsetY startY * mWidth * 4 (j startX) * 4 3];
}
}
}else{
console.error("Type not supported. ");
}
return dst;
}
Where size1 and size2 are the horizontal and vertical sizes of the core respectively, and must be positive odd numbers.
Gaussian smoothing
The most useful filter (although not the fastest). Gaussian filtering is to convolve each pixel of the input array with a Gaussian kernel
and treat the convolution sum as the output pixel value.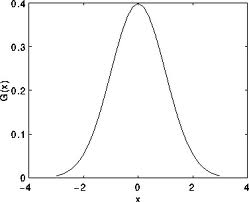
Referring to the one-dimensional Gaussian function, we can see that it is a function that is large in the middle and small on both sides.
So the weighting number of the Gaussian filter is large in the middle and small around it.
The two-dimensional Gaussian function is:

where
 is the mean (the position corresponding to the peak value),
is the mean (the position corresponding to the peak value),
 represents the standard deviation (variable
represents the standard deviation (variable
 and variables
and variables
 Each has a mean and each has a standard deviation).
Each has a mean and each has a standard deviation).
Here we refer to the implementation of OpenCV, but there should be room for optimization because the separation filter has not been used yet.
First we make a getGaussianKernel to return a one-dimensional array of Gaussian filters.
function getGaussianKernel(__n, __sigma){
var SMALL_GAUSSIAN_SIZE = 7,
smallGaussianTab = [[1],
[0.25, 0.5, 0.25],
[0.0625, 0.25, 0.375, 0.25, 0.0625],
[0.03125, 0.10937 5,0.21875, 0.28125, 0.21875, 0.109375, 0.03125]
];
var fixedKernel = __n & 2 == 1 && __n <= SMALL_GAUSSIAN_SIZE && __sigma <= 0 ? smallGaussianTab[__n >& gt; 1] : 0;
var sigmaX = __sigma > 0 ? __sigma : ((__n - 1) * 0.5 - 1) * 0.3 0.8,
scale2X = -0.5 / (sigmaX * sigmaX),
sum = 0;
var i, x, t, kernel = [];
for(i = 0; i < __n; i ){
x = i - (__n - 1) * 0.5;
t = fixedKernel ? fixedKernel[i] : Math.exp(scale2X * x * x);
kernel[i] = t;
sum = t;
}
sum = 1 / sum;
for(i = __n; i--;){
kernel[i] *= sum;
}
return kernel;
};
Then through two one-dimensional arrays, a complete Gaussian kernel can be calculated, and then using the loop method used in blur, The Gaussian smoothed matrix can be calculated.
function GaussianBlur(__src, __size1, __size2, __sigma1, __sigma2, __borderType, __dst){
if(__src.type && __src.type == "CV_RGBA"){
var height = __src.row,
width = __src.col,
dst = __dst || new Mat(height, width, CV_RGBA),
dstData = dst.data;
var sigma1 = __sigma1 || 0,
sigma2 = __sigma2 || __sigma1;
var size1 = __size1 || Math.round(sigma1 * 6 1) | 1,
size2 = __size2 || Math.round(sigma2 * 6 1) | 1,
size = size1 * size2;
if(size1 % 2 !== 1 || size2 % 2 !== 1){
console.error("size必须是奇数。");
return __src;
}
var startX = Math.floor(size1 / 2),
startY = Math.floor(size2 / 2);
var withBorderMat = copyMakeBorder(__src, startY, startX, 0, 0, __borderType),
mData = withBorderMat.data,
mWidth = withBorderMat.col;
var kernel1 = getGaussianKernel(size1, sigma1),
kernel2,
kernel = new Array(size1 * size2);
if(size1 === size2 && sigma1 === sigma2)
kernel2 = kernel1;
else
kernel2 = getGaussianKernel(size2, sigma2);
var i, j, c, y, x;
for(i = kernel2.length; i--;){
for(j = kernel1.length; j--;){
kernel[i * size1 j] = kernel2[i] * kernel1[j];
}
}
var newValue, nowX, offsetY, offsetI;
for(i = height; i--;){
offsetI = i * width;
for(j = width; j--;){
for(c = 3; c--;){
newValue = 0;
for(y = size2; y--;){
offsetY = (y i) * mWidth * 4;
for(x = size1; x--;){
nowX = (x j) * 4 c;
newValue = (mData[offsetY nowX] * kernel[y * size1 x]);
}
}
dstData[(j offsetI) * 4 c] = newValue;
}
dstData[(j offsetI) * 4 3] = mData[offsetY startY * mWidth * 4 (j startX) * 4 3];
}
}
}else{
console.error("不支持的类型");
}
return dst;
}
中值平滑
中值滤波将图像的每个像素用邻域 (以当前像素为中心的正方形区域)像素的
中值代替 。依然使用blur里面用到的循环,只要得到核中的所有值,再通过sort排序便可以得到中值,然后锚点由该值替代。
function medianBlur(__src, __size1, __size2, __borderType, __dst){
if(__src.type && __src.type == "CV_RGBA"){
var height = __src.row,
width = __src.col,
dst = __dst || new Mat(height, width, CV_RGBA),
dstData = dst.data;
var size1 = __size1 || 3,
size2 = __size2 || size1,
size = size1 * size2;
if(size1 % 2 !== 1 || size2 % 2 !== 1){
console.error("size必须是奇数");
return __src;
}
var startX = Math.floor(size1 / 2),
startY = Math.floor(size2 / 2);
var withBorderMat = copyMakeBorder(__src, startY, startX, 0, 0, __borderType),
mData = withBorderMat.data,
mWidth = withBorderMat.col;
var newValue = [], nowX, offsetY, offsetI;
var i, j, c, y, x;
for(i = height; i--;){
offsetI = i * width;
for(j = width; j--;){
for(c = 3; c--;){
for(y = size2; y--;){
offsetY = (y i) * mWidth * 4;
for(x = size1; x--;){
nowX = (x j) * 4 c;
newValue[y * size1 x] = mData[offsetY nowX];
}
}
newValue.sort();
dstData[(j offsetI) * 4 c] = newValue[Math.round(size / 2)];
}
dstData[(j offsetI) * 4 3] = mData[offsetY startY * mWidth * 4 (j startX) * 4 3];
}
}
}else{
console.error("类型不支持");
}
return dst;
};

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1393
1393
 52
1209
24
52
1209
24

 How is Wasserstein distance used in image processing tasks?
Jan 23, 2024 am 10:39 AM
How is Wasserstein distance used in image processing tasks?
Jan 23, 2024 am 10:39 AM
Wasserstein distance, also known as EarthMover's Distance (EMD), is a metric used to measure the difference between two probability distributions. Compared with traditional KL divergence or JS divergence, Wasserstein distance takes into account the structural information between distributions and therefore exhibits better performance in many image processing tasks. By calculating the minimum transportation cost between two distributions, Wasserstein distance is able to measure the minimum amount of work required to transform one distribution into another. This metric is able to capture the geometric differences between distributions, thereby playing an important role in tasks such as image generation and style transfer. Therefore, the Wasserstein distance becomes the concept
 In-depth analysis of the working principles and characteristics of the Vision Transformer (VIT) model
Jan 23, 2024 am 08:30 AM
In-depth analysis of the working principles and characteristics of the Vision Transformer (VIT) model
Jan 23, 2024 am 08:30 AM
VisionTransformer (VIT) is a Transformer-based image classification model proposed by Google. Different from traditional CNN models, VIT represents images as sequences and learns the image structure by predicting the class label of the image. To achieve this, VIT divides the input image into multiple patches and concatenates the pixels in each patch through channels and then performs linear projection to achieve the desired input dimensions. Finally, each patch is flattened into a single vector, forming the input sequence. Through Transformer's self-attention mechanism, VIT is able to capture the relationship between different patches and perform effective feature extraction and classification prediction. This serialized image representation is
 Application of AI technology in image super-resolution reconstruction
Jan 23, 2024 am 08:06 AM
Application of AI technology in image super-resolution reconstruction
Jan 23, 2024 am 08:06 AM
Super-resolution image reconstruction is the process of generating high-resolution images from low-resolution images using deep learning techniques, such as convolutional neural networks (CNN) and generative adversarial networks (GAN). The goal of this method is to improve the quality and detail of images by converting low-resolution images into high-resolution images. This technology has wide applications in many fields, such as medical imaging, surveillance cameras, satellite images, etc. Through super-resolution image reconstruction, we can obtain clearer and more detailed images, which helps to more accurately analyze and identify targets and features in images. Reconstruction methods Super-resolution image reconstruction methods can generally be divided into two categories: interpolation-based methods and deep learning-based methods. 1) Interpolation-based method Super-resolution image reconstruction based on interpolation
 How to deal with image processing and graphical interface design issues in C# development
Oct 08, 2023 pm 07:06 PM
How to deal with image processing and graphical interface design issues in C# development
Oct 08, 2023 pm 07:06 PM
How to deal with image processing and graphical interface design issues in C# development requires specific code examples. Introduction: In modern software development, image processing and graphical interface design are common requirements. As a general-purpose high-level programming language, C# has powerful image processing and graphical interface design capabilities. This article will be based on C#, discuss how to deal with image processing and graphical interface design issues, and give detailed code examples. 1. Image processing issues: Image reading and display: In C#, image reading and display are basic operations. Can be used.N
 Java development: how to implement image recognition and processing
Sep 21, 2023 am 08:39 AM
Java development: how to implement image recognition and processing
Sep 21, 2023 am 08:39 AM
Java Development: A Practical Guide to Image Recognition and Processing Abstract: With the rapid development of computer vision and artificial intelligence, image recognition and processing play an important role in various fields. This article will introduce how to use Java language to implement image recognition and processing, and provide specific code examples. 1. Basic principles of image recognition Image recognition refers to the use of computer technology to analyze and understand images to identify objects, features or content in the image. Before performing image recognition, we need to understand some basic image processing techniques, as shown in the figure
 How to use AI technology to restore old photos (with examples and code analysis)
Jan 24, 2024 pm 09:57 PM
How to use AI technology to restore old photos (with examples and code analysis)
Jan 24, 2024 pm 09:57 PM
Old photo restoration is a method of using artificial intelligence technology to repair, enhance and improve old photos. Using computer vision and machine learning algorithms, the technology can automatically identify and repair damage and flaws in old photos, making them look clearer, more natural and more realistic. The technical principles of old photo restoration mainly include the following aspects: 1. Image denoising and enhancement. When restoring old photos, they need to be denoised and enhanced first. Image processing algorithms and filters, such as mean filtering, Gaussian filtering, bilateral filtering, etc., can be used to solve noise and color spots problems, thereby improving the quality of photos. 2. Image restoration and repair In old photos, there may be some defects and damage, such as scratches, cracks, fading, etc. These problems can be solved by image restoration and repair algorithms
 PHP study notes: face recognition and image processing
Oct 08, 2023 am 11:33 AM
PHP study notes: face recognition and image processing
Oct 08, 2023 am 11:33 AM
PHP study notes: Face recognition and image processing Preface: With the development of artificial intelligence technology, face recognition and image processing have become hot topics. In practical applications, face recognition and image processing are mostly used in security monitoring, face unlocking, card comparison, etc. As a commonly used server-side scripting language, PHP can also be used to implement functions related to face recognition and image processing. This article will take you through face recognition and image processing in PHP, with specific code examples. 1. Face recognition in PHP Face recognition is a
 Scale Invariant Features (SIFT) algorithm
Jan 22, 2024 pm 05:09 PM
Scale Invariant Features (SIFT) algorithm
Jan 22, 2024 pm 05:09 PM
The Scale Invariant Feature Transform (SIFT) algorithm is a feature extraction algorithm used in the fields of image processing and computer vision. This algorithm was proposed in 1999 to improve object recognition and matching performance in computer vision systems. The SIFT algorithm is robust and accurate and is widely used in image recognition, three-dimensional reconstruction, target detection, video tracking and other fields. It achieves scale invariance by detecting key points in multiple scale spaces and extracting local feature descriptors around the key points. The main steps of the SIFT algorithm include scale space construction, key point detection, key point positioning, direction assignment and feature descriptor generation. Through these steps, the SIFT algorithm can extract robust and unique features, thereby achieving efficient image processing.
