

Three.js源码阅读笔记(基础的核心Core对象)_基础知识

Three.js是一个比较伟大的webgl开源库,它简化了浏览器3D编程,使得使用JavaScript在浏览器中创建复杂的场景变得容易很多。Github上众多webgl demo令我兴奋不已,跃跃欲试。由于这个库还处在开发阶段,因此资料非常匮乏,爱好者大部分时间不得不通过阅读该库的源码进行学习,我现在也准备这样做。
这是第一篇笔记,先从最基础的核心(Core)对象开始。
Core::Vector2
该构造函数用来创建一个表示二维向量的对象
THREE.Vector2 = function ( x, y ) {
this.x = x || 0;
this.y = y || 0;
};
Vector2对象的功能函数采用定义构造函数的原型对象来实现,形如:
THREE.Vector2.prototype = {
constructor: THREE.Vector2,
set: function ( x, y ) {
this.x = x;
this.y = y;
return this;
},
copy: function ( v ) {
this.x = v.x;
this.y = v.y;
return this;
},
...... // 更多的函数
};
函数set(x,y)用以指定向量的值,调用者本身的x,y值被影响了,而该方法本身又返回调用者本身,这种情况很常见,以下不再说明。通过文字能够表述清楚功能的函数不再引用源代码,这一点以下也不再说明。
函数copy(v)用来将向量v复制进调用者。
函数add(a,b)和函数sub(a,b)分别表示对向量a,b相加和相减。
函数addSelf(v)和subSelf(v)分别表示对调用者本身加上或减去向量v。
函数multiplyScale(s)和divideScale(s)分别表示对调用者本身乘以或除以s。
函数lerpSelf(v,alpha)将调用者向v所指的方向旋转alpha,当alpha为1时,调用者最终等于v,而当alpha=0时,调用者还等于原来。
lerpSelf: function ( v, alpha ) {
this.x += ( v.x - this.x ) * alpha;
this.y += ( v.y - this.y ) * alpha;
return this;
},
函数negate()对调用者取反。
函数dot(v)返回float类型的调用者和向量v的点乘。
函数lengthSq()和函数length()返回float类型的调用者长度平方或长度。
函数normalize()将调用者本身归一化。
函数distanceToSquared(v)和distanceTo(v)将返回调用者和向量v的距离。这里的距离其实是两向量起点都在原点时,终点之间的距离,也就是向量this-v的长度。
函数setLength(s)将向量的长度缩放至为s,方向不变。
函数equals(v)判断调用者与向量v的值是否相同。
函数isZero()判断调用者是否是零向量。
函数clone()返回一个与调用者值一样的新向量,相当于将其复制出去,注意与copy(v)的区别。
Core::Vector3
该构造函数创建一个表示三维向量的对象
THREE.Vector3 = function ( x, y, z ) {
this.x = x || 0;
this.y = y || 0;
this.z = z || 0;
};
三维向量和二维向量有许多共通之处,比如set,add,dot,length,clone等,此处尽数略去,只记录三维向量比二维向量多出的部分函数。
函数setX(x),setY(y)和setZ(z)用来单独设置某一分量的值。
函数cross(a,b)和crossSelf(v)分别使调用者变为a,b的叉乘或者调用者本身与v的叉乘。叉乘是一个向量,垂直于参与叉乘的两个向量并呈右手螺旋法则。
函数getPositionFromMatrix(m),getRotationFromMatrix(m),getScaleFromMatrix(m)从4×4的模型矩阵中提取位置分量,旋转分量和缩放分量。模型矩阵表示了一系列平移、旋转、缩放变换的叠加效果。(这里第二个函数出现在文档中,在源码中被另外两个函数代替了,也许还没来得及更新)。
函数angleTo(v)计算调用者和向量v的夹角。
Core::Vector4
该构造函数创建一个表示四维向量的对象
THREE.Vector4 = function ( x, y, z, w ) {
this.x = x || 0;
this.y = y || 0;
this.z = z || 0;
this.w = ( w !== undefined ) ? w : 1;
};
四维向量用来表示齐次坐标,其函数和Vector2,Vector3中的函数功能重合,仅仅是多一个分量而已,这里不再记录。
Core::Matrix3
该构造函数创建一个表示3×3矩阵的对象
THREE.Matrix3 = function () {
this.elements = new Float32Array(9);
};
3×3矩阵有9个元素,存储在矩阵对象的属性elements中,elements是一个数组。
函数getInverse(m)返回矩阵m的逆矩阵,同时改变调用者本身。
函数transpose()转置调用者。
函数transposeToArray(r)将调用者转置进数组r而不改变自身。(这个地方似乎源码错了,var m=this.m应该为var m=this.elements。)
Core::Matrix4
该构造函数创建一个表示4×4矩阵的对象,4×4矩阵在三维图形学中非常重要,模型矩阵、视图矩阵和投影矩阵都是这样的矩阵。
THREE.Matrix4 = function ( n11, n12, n13, n14, n21, n22, n23, n24, n31, n32, n33, n34, n41, n42, n43, n44 ) {
this.elements = new Float32Array( 16 );
this.set(
( n11 !== undefined ) ? n11 : 1, n12 || 0, n13 || 0, n14 || 0,
n21 || 0, ( n22 !== undefined ) ? n22 : 1, n23 || 0, n24 || 0,
n31 || 0, n32 || 0, ( n33 !== undefined ) ? n33 : 1, n34 || 0,
n41 || 0, n42 || 0, n43 || 0, ( n44 !== undefined ) ? n44 : 1
);
};
在Matrix3对象中出现的几个函数在Matrix4中有相同的作用,这里也略去。
函数identity()将对象重置为单位阵。
函数lookAt(eye,center,up)将对象设定为一个视图矩阵,参数都是Vector3对象,该矩阵只会用到eye和center的相对位置。该视图矩阵表示,摄像机在eye位置看向center位置,且向上的向量(这一点稍后解释)为up时的视图矩阵。视图矩阵又可以看做摄像机的模型矩阵,所以该函数产生的矩阵又可以表示以下变换:将物体从原点平移至位置center-eye,再将其旋转至向上的向量为up。向上的向量up用来固定相机,可以想象当相机固定在一点,镜头朝向固定方向的时候,还是可以在一个维度里自由旋转的,up向量固定相机的这个维度。
lookAt: function ( eye, target, up ) {
var te = this.elements;
var x = THREE.Matrix4.__v1; // 空Vector3对象,下同
var y = THREE.Matrix4.__v2;
var z = THREE.Matrix4.__v3;
z.sub( eye, target ).normalize();
if ( z.length() === 0 ) {
z.z = 1;
}
x.cross( up, z ).normalize();
if ( x.length() === 0 ) {
z.x += 0.0001;
x.cross( up, z ).normalize();
}
y.cross( z, x );
te[0] = x.x; te[4] = y.x; te[8] = z.x;
te[1] = x.y; te[5] = y.y; te[9] = z.y;
te[2] = x.z; te[6] = y.z; te[10] = z.z;
return this;
},
函数multiply(a,b),multiplySelf(v)和multiplyToArray(a,b,r)将两个矩阵相乘。
函数multiplyScale(s)将对象所有16个元素都乘以s。
函数multiplyVector3(v)和multiplyVector4(v)将对象矩阵左乘四维行向量,返回vector3和vector4类型的行向量。如果对象矩阵是模型视图矩阵,输入的向量是点位置信息,则输出的向量则是经过模型变换和相机变换后,该点相对于相机的位置。输入vector3类型向量时,自动补足为齐次坐标,返回时再砍掉第四个分量成为普通坐标。
函数rotateAxis(v)使用对象矩阵左上角的3×3子矩阵左乘行向量v,得到一个新的行向量并归一化,返回这个新行向量。该函数同时更新了向量v的值。模型视图矩阵左上角3×3的子矩阵包含了模型矩阵中的旋转信息,将该子矩阵左乘一个向量,得到的新向量实际上就是原向量经过旋转(该旋转效果来自于模型矩阵)得到的。因此该函数名为rotateAxis。
rotateAxis: function ( v ) {
var te = this.elements;
var vx = v.x, vy = v.y, vz = v.z;
v.x = vx * te[0] + vy * te[4] + vz * te[8];
v.y = vx * te[1] + vy * te[5] + vz * te[9];
v.z = vx * te[2] + vy * te[6] + vz * te[10];
v.normalize();
return v;
},
函数crossVector(v)计算矩阵对象(调用者)和v的叉乘,实际上就是对象矩阵左乘四维行向量v,返回向量。这个具体是做什么的,我还没弄明白。
crossVector: function ( a ) {
var te = this.elements;
var v = new THREE.Vector4();
v.x = te[0] * a.x + te[4] * a.y + te[8] * a.z + te[12] * a.w;
v.y = te[1] * a.x + te[5] * a.y + te[9] * a.z + te[13] * a.w;
v.z = te[2] * a.x + te[6] * a.y + te[10] * a.z + te[14] * a.w;
v.w = ( a.w ) ? te[3] * a.x + te[7] * a.y + te[11] * a.z + te[15] * a.w : 1;
return v;
},
函数determinant()计算矩阵的行列式值。
函数flattenToArray(flat)和函数flattenToArrayOfset(flat,offset)将矩阵转存到一维数组中,前一个函数从flat[0]存储到flat[15],后一个函数允许指定开始存储的位置,从flat[offset]存储到flat[offset+15]。
函数getPosition()和函数setPosition()用来获取或设置矩阵对象的位置分量。正如旋转分量存储在左上角3×3的子矩阵中,位置分量存储在第四行前三个分量上,即element[12], element[13], element[14]中。
函数getColumeX(),getColumeY(),getColumeZ()分别提取左上角3×3子矩阵的三列。
函数compose(translate,rotation,scale)将对象矩阵设置为由vector3类型translate对象表示的平移、由matrix3类型rotation对象表示的旋转、由vector3类型scale对象表示的缩放这三个变换组合到一起的变换矩阵。实际上就是讲其直接填充到模型矩阵的相应子空间。
函数decompose(translate,rotation,scale)将矩阵对象拆开到三个对象中,和上一个函数正好相反。
函数extractPosition(m)和extractRotation(m)将矩阵对象m中表示位置或旋转的分量抽取到调用者对象中,比如两个物体经过多次各不相同的变换,只需要一个物体的模型视图矩阵extractRotation另一个物体的模型视图矩阵,则调用者就和另外一个物体保持着变换之处相同的旋转方位。
函数translate(v)是模型矩阵最基本的变换之一:平移变换,将模型矩阵从属的物体平移向量v。
函数rotateX(angle),rotateY(angle),rotateZ(angle)分别将模型矩阵从属的物体绕X,Y,Z轴旋转角度angle。
函数rotateByAxis(axis, angle)将模型矩阵从属的物体绕一个任意轴axis旋转角度angle,这是上面两条所涉及的变换的多次叠加(叠加参数由当前位置和axis参数决定),我在《模型视图矩阵和投影矩阵:webgl笔记(1)》中曾讨论到绕任意轴旋转的问题。
这里不应该有一个scale(s)函数吗?可是我在源码中没找到。
函数makeTranslate(x,y,z),makeRotationX(theta),makeRotationY(theta),makeRotationZ(theta),makeRotationAxis(axis,angle),makeScale(s)函数将对象矩阵直接重置为单位阵经过一次平移、或绕某轴旋转、或单纯某次缩放后的矩阵。该函数更新对象本身的值,而且更新的结果与对象之前的值毫无关联(这也是make前缀函数的特点)。
函数makeFrustum(...),makePerspective(...),makeOrthographic(...)也是用来初始化新矩阵,具体含义到相机类里面再讨论,我想相机类的构造函数里一定会调用这些函数的。
函数clone()将矩阵对象复制出来并返回。
Core::Face3
该函数创建一个三角形平面对象
THREE.Face3 = function ( a, b, c, normal, color, materialIndex ) {
this.a = a;
this.b = b;
this.c = c;
this.normal = normal instanceof THREE.Vector3 ? normal : new THREE.Vector3();
this.vertexNormals = normal instanceof Array ? normal : [ ];
this.color = color instanceof THREE.Color ? color : new THREE.Color();
this.vertexColors = color instanceof Array ? color : [];
this.vertexTangents = [];
this.materialIndex = materialIndex;
this.centroid = new THREE.Vector3();
};
对象的a,b,c值是三个顶点的索引(后面会说到,Mesh对象中将所有点存储为一个数组);顾名思义normal是法线;color是颜色;materialIndex是顶点材质索引:这几个参数即可以传入vector3类型又可以传入数组类型。
clone(x)方法返回一个新的,具有相同值的对象。
Core::Face4
该函数创建一个四个顶点的面,和Face3几乎一样,略去。
Core::Math
THREE.Math是一个“静态类”,没有构造函数因此也不需要通过new关键字初始化。该类提供一些必要的数学工具。
函数clamp(x,a,b)将x夹在区间[a,b]中。clampBottom(x,a)的作用类似,只不过只夹一边。
函数mapLinear(x,a1,a2,b1,b2)计算出一个值y,使得点(x,y)落在(a1,a2)和(b1,b2)连成的直线上。
mapLinear: function ( x, a1, a2, b1, b2 ) {
return b1 + ( x - a1 ) * ( b2 - b1 ) / ( a2 - a1 );
},
函数random16(),randInt(low,high),randFloat(low,high),randFloatSpread(range)分别产生[0,1]区间的16位随机浮点数,[low,high]区间随机整数,[low,high]区间随机浮点数,[-range/2,range/2]区间随机浮点数。
函数sigh(x)根据x的符号返回+1或-1。
Core::Clock
该构造函数创建时钟(确切的说是秒表)对象
THREE.Clock = function ( autoStart ) {
this.autoStart = ( autoStart !== undefined ) ? autoStart : true;
this.startTime = 0;
this.oldTime = 0;
this.elapsedTime = 0;
this.running = false;
};
函数start()和stop()用来开始计时或停止计时。
函数getDelta()返回调用该函数时距离上一次调用该函数时的时间长度,如果是第一次调用该函数,则返回此时距离开始计时时的时间长度。如果autoStart值为真,若在调用getDelta()函数时尚未调用start()函数或者已经调用过stop()函数,则自动开始计时并返回0。如果autoStart()值为假,则在调用start()之前或stop()之后,调用getDelta()返回0。
函数getElapsedTime()返回调用该函数时距离开始计时时的时间。
Core::Color
该构造函数构造一个表示颜色的对象
THREE.Color = function ( hex ) {
if ( hex !== undefined ) this.setHex( hex );
return this;
};
函数setHex(hex)以十六进制序列设置对象的r,g,b属性。实际上在对象中,最终是以这三个属性存储颜色的。
setHex: function ( hex ) {
hex = Math.floor( hex );
this.r = ( hex >> 16 & 255 ) / 255;
this.g = ( hex >> 8 & 255 ) / 255;
this.b = ( hex & 255 ) / 255;
return this;
},
函数setRGB(r,g,b)和setHSV(h,s,v)以RGB值或HSV值设置对象。
函数getHex()返回16进制颜色值。
函数copyGammaToLinear(color),copyLinearToGamma(color)将color的rgb值分别平方或开方,赋给调用者对象。
函数convertGammaToLinear()和convertLinearToGamma()分别对调用者自身的rgb值平方或开放。

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 Replace String Characters in JavaScript
Mar 11, 2025 am 12:07 AM
Replace String Characters in JavaScript
Mar 11, 2025 am 12:07 AM
Detailed explanation of JavaScript string replacement method and FAQ This article will explore two ways to replace string characters in JavaScript: internal JavaScript code and internal HTML for web pages. Replace string inside JavaScript code The most direct way is to use the replace() method: str = str.replace("find","replace"); This method replaces only the first match. To replace all matches, use a regular expression and add the global flag g: str = str.replace(/fi
 8 Stunning jQuery Page Layout Plugins
Mar 06, 2025 am 12:48 AM
8 Stunning jQuery Page Layout Plugins
Mar 06, 2025 am 12:48 AM
Leverage jQuery for Effortless Web Page Layouts: 8 Essential Plugins jQuery simplifies web page layout significantly. This article highlights eight powerful jQuery plugins that streamline the process, particularly useful for manual website creation
 Build Your Own AJAX Web Applications
Mar 09, 2025 am 12:11 AM
Build Your Own AJAX Web Applications
Mar 09, 2025 am 12:11 AM
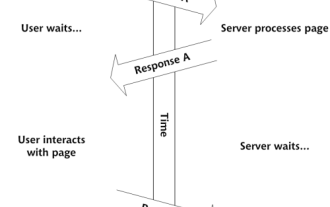
So here you are, ready to learn all about this thing called AJAX. But, what exactly is it? The term AJAX refers to a loose grouping of technologies that are used to create dynamic, interactive web content. The term AJAX, originally coined by Jesse J
 10 jQuery Fun and Games Plugins
Mar 08, 2025 am 12:42 AM
10 jQuery Fun and Games Plugins
Mar 08, 2025 am 12:42 AM
10 fun jQuery game plugins to make your website more attractive and enhance user stickiness! While Flash is still the best software for developing casual web games, jQuery can also create surprising effects, and while not comparable to pure action Flash games, in some cases you can also have unexpected fun in your browser. jQuery tic toe game The "Hello world" of game programming now has a jQuery version. Source code jQuery Crazy Word Composition Game This is a fill-in-the-blank game, and it can produce some weird results due to not knowing the context of the word. Source code jQuery mine sweeping game
 How do I create and publish my own JavaScript libraries?
Mar 18, 2025 pm 03:12 PM
How do I create and publish my own JavaScript libraries?
Mar 18, 2025 pm 03:12 PM
Article discusses creating, publishing, and maintaining JavaScript libraries, focusing on planning, development, testing, documentation, and promotion strategies.
 Load Box Content Dynamically using AJAX
Mar 06, 2025 am 01:07 AM
Load Box Content Dynamically using AJAX
Mar 06, 2025 am 01:07 AM
This tutorial demonstrates creating dynamic page boxes loaded via AJAX, enabling instant refresh without full page reloads. It leverages jQuery and JavaScript. Think of it as a custom Facebook-style content box loader. Key Concepts: AJAX and jQuery
 jQuery Parallax Tutorial - Animated Header Background
Mar 08, 2025 am 12:39 AM
jQuery Parallax Tutorial - Animated Header Background
Mar 08, 2025 am 12:39 AM
This tutorial demonstrates how to create a captivating parallax background effect using jQuery. We'll build a header banner with layered images that create a stunning visual depth. The updated plugin works with jQuery 1.6.4 and later. Download the
 How to Write a Cookie-less Session Library for JavaScript
Mar 06, 2025 am 01:18 AM
How to Write a Cookie-less Session Library for JavaScript
Mar 06, 2025 am 01:18 AM
This JavaScript library leverages the window.name property to manage session data without relying on cookies. It offers a robust solution for storing and retrieving session variables across browsers. The library provides three core methods: Session
