
 Technology peripherals
AI
A drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the wind
Technology peripherals
AI
A drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the wind
A drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the wind

When the wind is strong enough to blow the umbrella, the drone is stable, like this:
Windflying is a part of flying in the air. From a large level, wind speed may bring challenges to pilots when they land their aircraft; from a small level, gusty winds will also affect the flight of drones.
Currently, drones either fly under controlled conditions, without wind, or are operated by humans using remote controls. Drones are controlled by researchers to fly in formations in the open sky, but these flights are usually conducted under ideal conditions and environments.
However, for drones to autonomously perform necessary but routine tasks, such as delivering packages, they must be able to adapt to wind conditions in real time.
To give drones better maneuverability when flying in the wind, a team of engineers from Caltech developed Neural-Fly, a deep neural network that An artificial intelligence tool that allows drones to remain agile in windy conditions by simply updating some key parameters to help drones respond to new and unknown wind conditions in real time.
At the beginning of the article, we have initially seen the wind resistance ability of UAVs. The following shows a four-rotor UAV. With the help of the tools developed in this research, it can achieve wind speeds of up to Complete the figure-8 shuttle operation at 27 mph:
Watch the drone flying in the wind from a different angle:
In order for the drone to shuttle under various wind speeds, data is essential. This study does not require much data, and it was obtained in just 12 After minutes of flight data, an autonomous quadcopter drone equipped with Neural-Fly learned how to respond to strong winds. “The amount of data used is very small,” said Michael O’Connell, a graduate student in Caltech’s Department of Aeronautics and Astronautics and one of the paper’s authors.
The research was published Wednesday in the journal Science Robotics.
- Paper address: https://www.science.org/doi/10.1126/scirobotics.abm6597
- arXiv address: https://arxiv.org/pdf/2205.06908.pdf
In the Neural-Fly experimental training, the drone flies in the wind Flying in the cave, there are six different wind speeds, the fastest being 13.4 mph.
Based on this data, the team created deep neural networks and then allowed their aircraft to skillfully maneuver in the same wind tunnel, e.g. Zoom into the gate in a figure-8 pattern or cruise through two oval gates. The drone traveled faster in testing than it had experienced in training: about 27 miles per hour. This is the maximum wind speed that the wind tunnel can generate, said Guanya Shi, an author on the paper and a graduate student at Caltech. In addition to requiring only a small amount of data, the software only runs on a Raspberry Pi, an inexpensive computing device.
Corresponding author Soon-Jo Chung, professor of aerospace, control and dynamic systems at Caltech, said the error rates they saw compared with existing SOTA technology, equipped with the new The system's drone flight performance is 2.5 to 4 times better.
The picture below from left to right is Shi Guanya, Soon-Jo Chung and Michael O'Connell. It is worth congratulating that Shi Guanya will join the Robotics Institute of the School of Computing at Carnegie Mellon University as an assistant professor in September 2023.
# Researchers said that this technology will be used for drone delivery or flying cars in the future.
Neural-Fly Technology Overview
Unmanned aerial vehicles (UAVs) perform in dynamic high-velocity winds if they are to achieve sustained commercialization Safe and precise flight maneuvers are critical. However, it is challenging to design efficient robot controllers using traditional control design methods because the relationship between different wind conditions and their impact on UAV maneuverability has not been studied in depth.
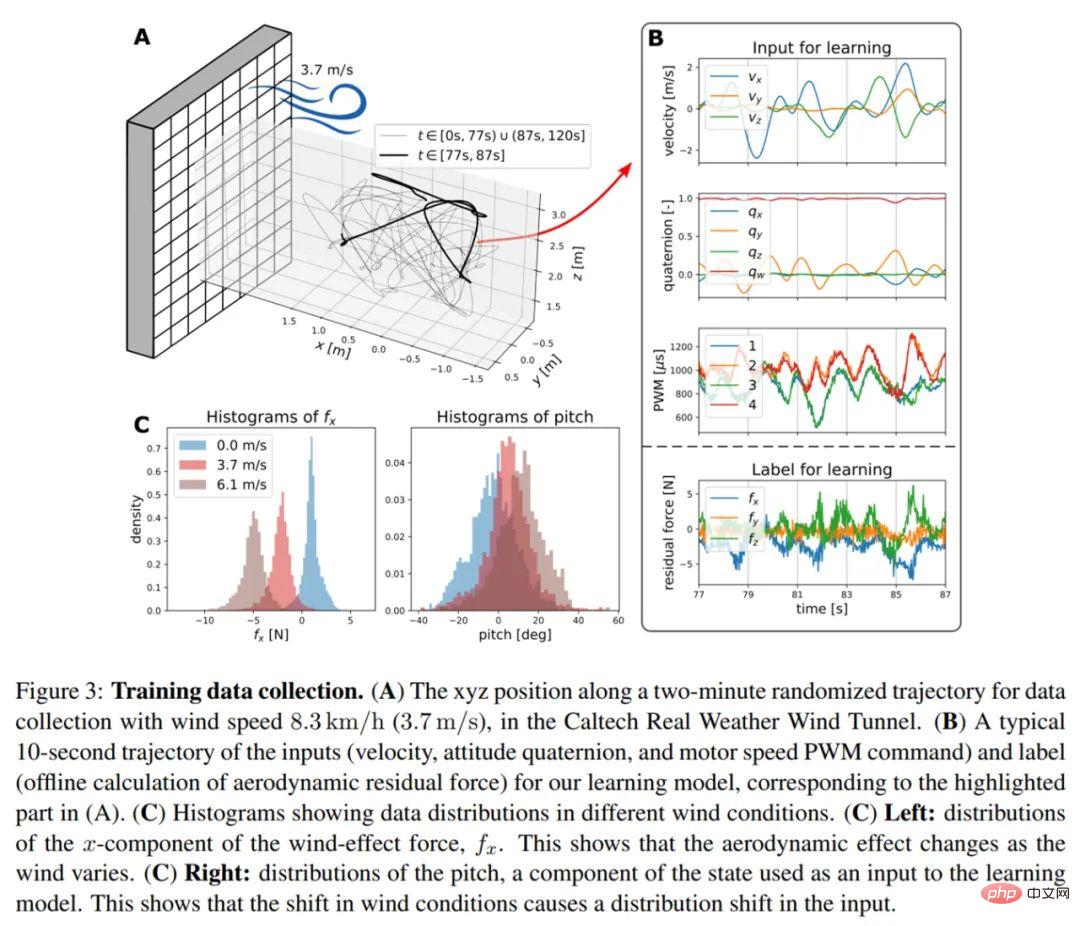
The “Neural-Fly” proposed by researchers at the California Institute of Technology is a data-driven method that serves as a trajectory tracking controller based on deep learning and can learn to quickly adapt to rapidly changing wind conditions. Figure 3(A) below shows the data collection process; 3(B) shows the input and labels of the training data under the wind speed of 13.3km/h (3.7m/s); 3(C) shows the input data and labels under different wind conditions. Distribution of labeled data.
Online adaptive offline meta-learning
Figure 2 below is an overview of the Neural-Fly method, showing It has made progress in adaptive flight control and deep learning-based robot control. Neural-Fly enables centimeter-level position error tracking for flexible and challenging trajectories under dynamic wind conditions for standard UAVs. Specifically, this method mainly consists of two parts, namely offline learning stage and online adaptive control stage for real-time online learning.
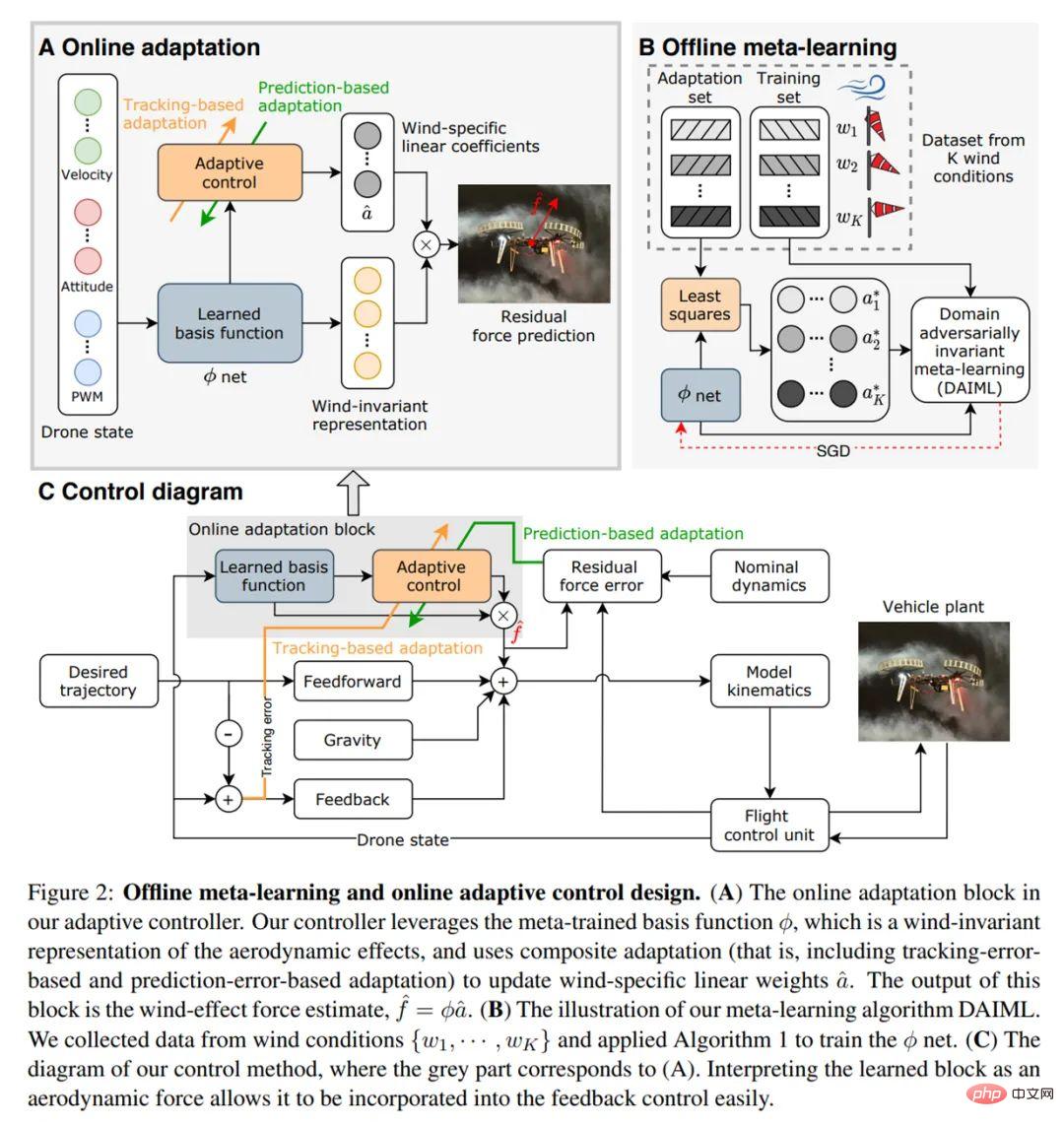
For the offline learning stage, the researchers developed Domain Adversarially Invariant Meta-Learning, DAIML), which learns aerodynamic wind-independent deep neural network (DNN) representations in a data-efficient manner. The representation adapts to different wind conditions by updating a set of linear coefficients output by a hybrid deep neural network.
DAIML is also data efficient, only using a total of 12 minutes of flight data under 6 different wind conditions to train the deep neural network. DAIML contains several key features that not only improve data efficiency but can also be informed by downstream online adaptive control stages.
It is worth noting that DAIML uses spectral normalization to control the Lipschitz property of deep neural networks to improve generalization to unseen data and provide closed-loop stability and Robustness. Additionally, DAIML uses a discriminative network to ensure that the learned representation is wind-invariant and that wind-related information is only included in the linear coefficients adapted to the online control stage.
For the online adaptive control stage, the researchers developed a regularized compound adaptive control law, which is based on how the learned representation interacts with the closed-loop control It is derived from the basic understanding of system interaction and has strict theoretical support.
Specifically, the adaptive law uses a combination of the position tracking error term and the aerodynamic prediction error term to update the linear coefficients related to the wind. This approach effectively guarantees stable and rapid adaptation to any wind conditions and robustness to imperfect learning. Although this adaptive control law can be used with many learned models, the precise representation learned from DAIML helps further improve the speed of adaptation.
Experimental results
In terms of the effect of Neural-Fly, it is 66% better than the nonlinear tracking controller on average, and better than L_1 since The adaptive controller is improved by 42%, which is 35% higher than the incremental nonlinear dynamic inversion (INDI) controller. All of these results were accomplished using standard quadcopter drone hardware while running the PX4's default tuned attitude control.
Even compared to related work that has no external wind interference and uses more complex hardware (such as onboard optical sensors that require 10 times the control frequency and use DC motor speed feedback), Neural- The Fly's tracking performance is also competitive.
Table 1 below shows the error tracking statistics of different methods under different wind conditions.
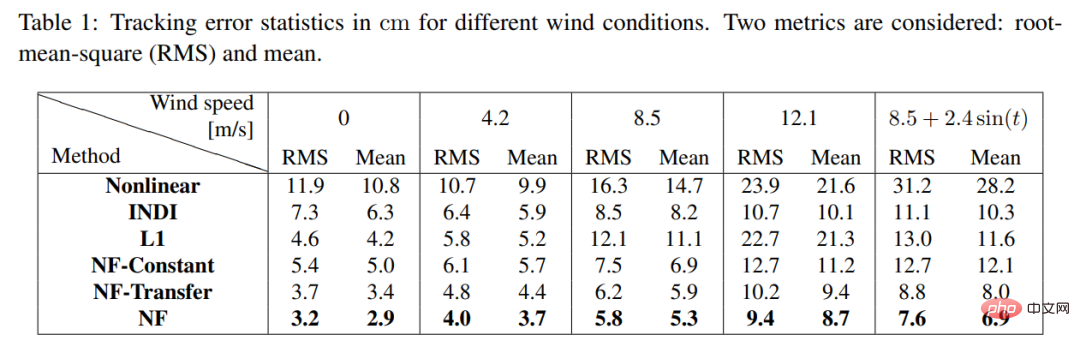
The researchers compared Neural-Fly with two variants, Neural-Fly-Transfer and Neural-Fly-Constant . Among them, NF-Transfer uses representations learned from training on data from different drones, while NF-Constant only uses adaptive control laws with trivial non-learning basis.
Neural-Fly-Transfer demonstrates robustness to UAV configuration changes and model mismatches, and the NF-Constant, L_1, and INDI methods all directly adapt to unknown dynamics without Assuming the underlying physical structure, they have similar performance.
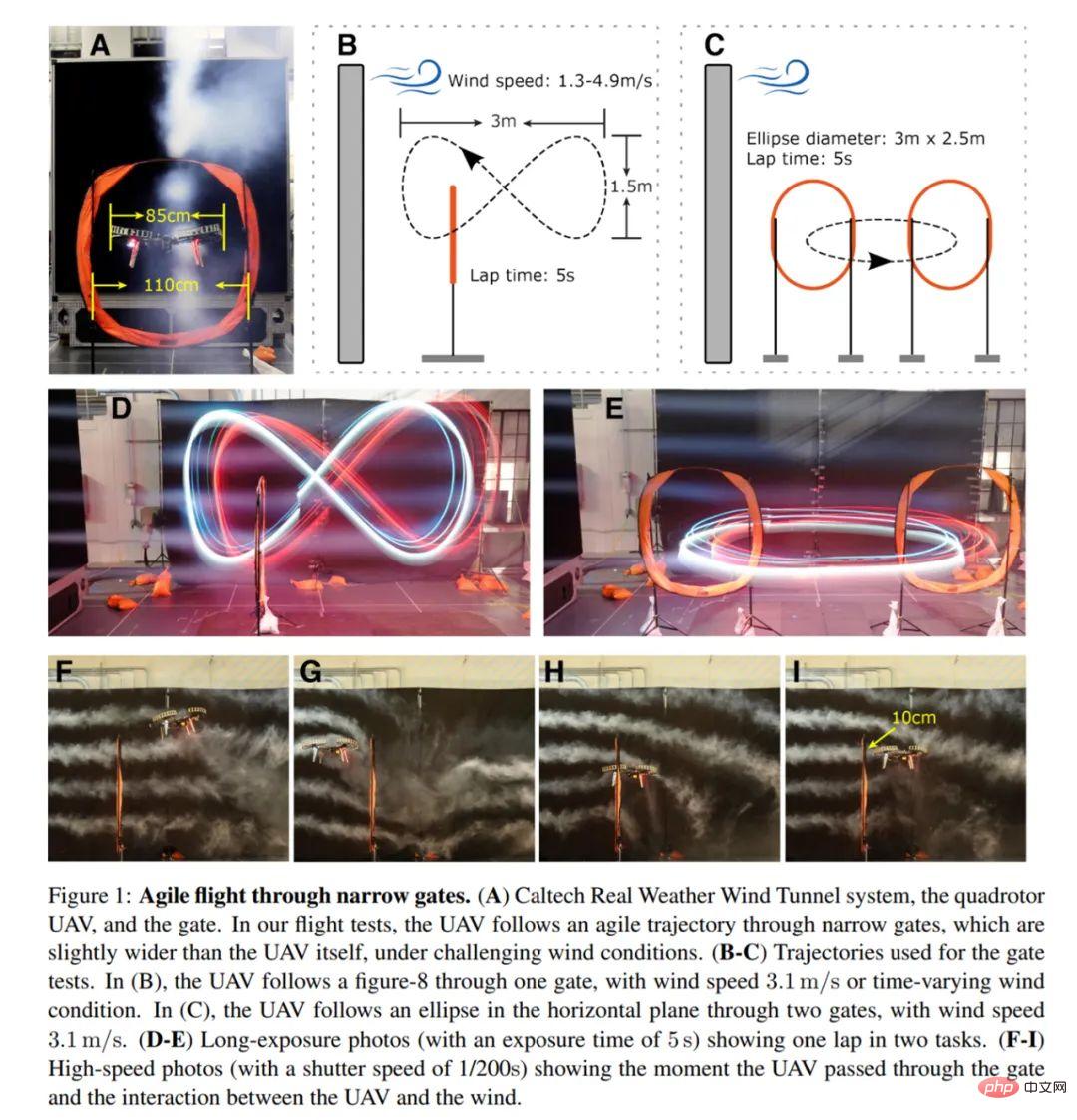
Finally, the researchers proved that Neural-Fly can implement a series of functions, allowing the drone to follow the trajectory and fly through the low-altitude door nimbly under strong wind conditions, as shown in Figure 1 below. .
The above is the detailed content of A drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the wind. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1378
1378
 52
52

 Bytedance Cutting launches SVIP super membership: 499 yuan for continuous annual subscription, providing a variety of AI functions
Jun 28, 2024 am 03:51 AM
Bytedance Cutting launches SVIP super membership: 499 yuan for continuous annual subscription, providing a variety of AI functions
Jun 28, 2024 am 03:51 AM
This site reported on June 27 that Jianying is a video editing software developed by FaceMeng Technology, a subsidiary of ByteDance. It relies on the Douyin platform and basically produces short video content for users of the platform. It is compatible with iOS, Android, and Windows. , MacOS and other operating systems. Jianying officially announced the upgrade of its membership system and launched a new SVIP, which includes a variety of AI black technologies, such as intelligent translation, intelligent highlighting, intelligent packaging, digital human synthesis, etc. In terms of price, the monthly fee for clipping SVIP is 79 yuan, the annual fee is 599 yuan (note on this site: equivalent to 49.9 yuan per month), the continuous monthly subscription is 59 yuan per month, and the continuous annual subscription is 499 yuan per year (equivalent to 41.6 yuan per month) . In addition, the cut official also stated that in order to improve the user experience, those who have subscribed to the original VIP
 Context-augmented AI coding assistant using Rag and Sem-Rag
Jun 10, 2024 am 11:08 AM
Context-augmented AI coding assistant using Rag and Sem-Rag
Jun 10, 2024 am 11:08 AM
Improve developer productivity, efficiency, and accuracy by incorporating retrieval-enhanced generation and semantic memory into AI coding assistants. Translated from EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG, author JanakiramMSV. While basic AI programming assistants are naturally helpful, they often fail to provide the most relevant and correct code suggestions because they rely on a general understanding of the software language and the most common patterns of writing software. The code generated by these coding assistants is suitable for solving the problems they are responsible for solving, but often does not conform to the coding standards, conventions and styles of the individual teams. This often results in suggestions that need to be modified or refined in order for the code to be accepted into the application
 The largest domestically produced unmanned transport aircraft successfully made its maiden flight: equipped with China Aviation Engineering Group's AEP100-A engine
Aug 23, 2024 am 07:32 AM
The largest domestically produced unmanned transport aircraft successfully made its maiden flight: equipped with China Aviation Engineering Group's AEP100-A engine
Aug 23, 2024 am 07:32 AM
According to news from this website on August 22, China Aviation Engine Group Co., Ltd. issued an official announcement today. At 6:28 today, the 900-kilowatt turboprop engine AEP100-A, which was completely independently developed by China Aviation Industry Corporation, powered the SA750U large unmanned transport aircraft in Shaanxi. Successful first flight. According to reports, the AEP100-A turboprop engine was designed by the China Aerospace Engineering Research Institute and manufactured in the South. It has the ability to adapt to high temperatures and plateaus. It uses three-dimensional aerodynamic design and unit design technology to provide power for aircraft while improving fuel economy. Improve overall aircraft operating efficiency. The AEP100 turboprop engine series can be equipped with 2 to 6 ton general-purpose aircraft or 3 to 10 ton unmanned aerial vehicles, and its comprehensive performance has reached the international advanced level of the same level currently in service. This site reported earlier
 Can fine-tuning really allow LLM to learn new things: introducing new knowledge may make the model produce more hallucinations
Jun 11, 2024 pm 03:57 PM
Can fine-tuning really allow LLM to learn new things: introducing new knowledge may make the model produce more hallucinations
Jun 11, 2024 pm 03:57 PM
Large Language Models (LLMs) are trained on huge text databases, where they acquire large amounts of real-world knowledge. This knowledge is embedded into their parameters and can then be used when needed. The knowledge of these models is "reified" at the end of training. At the end of pre-training, the model actually stops learning. Align or fine-tune the model to learn how to leverage this knowledge and respond more naturally to user questions. But sometimes model knowledge is not enough, and although the model can access external content through RAG, it is considered beneficial to adapt the model to new domains through fine-tuning. This fine-tuning is performed using input from human annotators or other LLM creations, where the model encounters additional real-world knowledge and integrates it
 To provide a new scientific and complex question answering benchmark and evaluation system for large models, UNSW, Argonne, University of Chicago and other institutions jointly launched the SciQAG framework
Jul 25, 2024 am 06:42 AM
To provide a new scientific and complex question answering benchmark and evaluation system for large models, UNSW, Argonne, University of Chicago and other institutions jointly launched the SciQAG framework
Jul 25, 2024 am 06:42 AM
Editor |ScienceAI Question Answering (QA) data set plays a vital role in promoting natural language processing (NLP) research. High-quality QA data sets can not only be used to fine-tune models, but also effectively evaluate the capabilities of large language models (LLM), especially the ability to understand and reason about scientific knowledge. Although there are currently many scientific QA data sets covering medicine, chemistry, biology and other fields, these data sets still have some shortcomings. First, the data form is relatively simple, most of which are multiple-choice questions. They are easy to evaluate, but limit the model's answer selection range and cannot fully test the model's ability to answer scientific questions. In contrast, open-ended Q&A
 SOTA performance, Xiamen multi-modal protein-ligand affinity prediction AI method, combines molecular surface information for the first time
Jul 17, 2024 pm 06:37 PM
SOTA performance, Xiamen multi-modal protein-ligand affinity prediction AI method, combines molecular surface information for the first time
Jul 17, 2024 pm 06:37 PM
Editor | KX In the field of drug research and development, accurately and effectively predicting the binding affinity of proteins and ligands is crucial for drug screening and optimization. However, current studies do not take into account the important role of molecular surface information in protein-ligand interactions. Based on this, researchers from Xiamen University proposed a novel multi-modal feature extraction (MFE) framework, which for the first time combines information on protein surface, 3D structure and sequence, and uses a cross-attention mechanism to compare different modalities. feature alignment. Experimental results demonstrate that this method achieves state-of-the-art performance in predicting protein-ligand binding affinities. Furthermore, ablation studies demonstrate the effectiveness and necessity of protein surface information and multimodal feature alignment within this framework. Related research begins with "S
 my country's first large-scale unmanned transport aircraft with a load exceeding 3 tons, the 'SA750U', successfully made its maiden flight, with nationally produced systems and materials
Aug 23, 2024 am 07:31 AM
my country's first large-scale unmanned transport aircraft with a load exceeding 3 tons, the 'SA750U', successfully made its maiden flight, with nationally produced systems and materials
Aug 23, 2024 am 07:31 AM
According to news from this site on August 22, according to the official public account of "Shanhe Huayu", at 6:28 today, the SA750U large unmanned transport aircraft independently developed by Sunward Huayu Aviation Technology and completed by the strategic coordination of Sunward Star Airlines flew from Jingbian, Xi'an. The experimental drone test center successfully made its first flight. ▲Picture source "Shanhe Huayu" official public account, the same as below. According to reports, during the 40-minute flight test, all system equipment of the aircraft worked normally and were in good condition. The attitude of the aircraft was stable and the performance met the design specifications. After completing the scheduled flight subjects Afterwards, the plane returned smoothly and the first flight was a complete success. The SA750U is my country's first large-scale unmanned transport aircraft with a load of over 3 tons. It only took Shanhe Huayu Company 2 years and 8 months to complete the entire process from concept design to the successful first flight of the first aircraft.
 SK Hynix will display new AI-related products on August 6: 12-layer HBM3E, 321-high NAND, etc.
Aug 01, 2024 pm 09:40 PM
SK Hynix will display new AI-related products on August 6: 12-layer HBM3E, 321-high NAND, etc.
Aug 01, 2024 pm 09:40 PM
According to news from this site on August 1, SK Hynix released a blog post today (August 1), announcing that it will attend the Global Semiconductor Memory Summit FMS2024 to be held in Santa Clara, California, USA from August 6 to 8, showcasing many new technologies. generation product. Introduction to the Future Memory and Storage Summit (FutureMemoryandStorage), formerly the Flash Memory Summit (FlashMemorySummit) mainly for NAND suppliers, in the context of increasing attention to artificial intelligence technology, this year was renamed the Future Memory and Storage Summit (FutureMemoryandStorage) to invite DRAM and storage vendors and many more players. New product SK hynix launched last year
