

Summary of experience in chatbot design based on state machine

In order to better understand the needs and improvement directions of intelligent robot projects, we often need to develop some tools. Of the several robotics projects I've been involved in, most have been successful in meeting product requirements. Through these practices, we deeply realized that if we want to continue to progress and improve, we must make significant improvements to the existing robot definition language.
- Simplify the creation process of bots that require complex conversation flows.
- Maximize reusability by reusing modules and conversation paths that have been defined in the past to create bots
In traditional practices, it is not easy to accomplish this because Intent definitions are mixed with partial ordering constraints, limiting the freedom of conversation paths. This is sufficient for handling "open" bots (common in FAQ style bots) where most questions are self-contained and always available. But for more "closed" bots, the potential conversational limitations are much greater (such as for a bot that orders tickets from online).
In order to bring the functionality of the chatbot definition language to a new level, in some projects we have introduced DSLs that are closer to state machine semantics and fully define the intent Separating from the conversion rules that control the robot to execute fixed-point available intentions, this has the following advantages:
- Previous intentions can be reused in the new robot, even if the dialogue path set is different.
- State machines can be used to define complex conversation flows, allowing the bot to maintain clear and precise semantics.
- Complex state guards can be created to control transitions. Move the bot to a new state based on user input, upcoming events and previous data, conversation parameters, etc.
- State bodies can be used to store complex conversation logic in response to user requests.
- Robots can be modularized to reuse parts of the state machine in other robots.
- Local fallback can be defined as part of stateful behavior. In addition to the default global fallback, you can also associate local fallbacks with states to handle errors in the context of the state, such as displaying a message to help the user answer a question asked by the bot at a specific state in the conversation.
Intent Definition Language
Intent definition is now decoupled from the execution part, but is still a separate sub-language. For each intent, we only need to provide some training sentences so that the robot can recognize the intent of the user's utterance and extract the required parameters from it.
As an example, we have a simple bot that understands only two types of user utterances: greetings and stating names. We can provide a few example sentences for each utterance type and let the robot learn how to recognize them. When the user enters an utterance, the robot performs the corresponding action based on its intent and extracts the required parameters from it.
intent Hello {
inputs {
"你好"
"早上好"
}
}
intent MyNameIs {
inputs {
"我的名字叫小明"
"我是小明"
"你可以叫我小明"
}
creates context Greetings {
set parameter name from fragment "小明" (entity any)
}
}We provide some sample sentences for each intent to train the robot how to recognize them. In addition, in some cases we also collect some parameters in the context (for example, the user's name) so that we can respond to the user more personally in the future.
We haven't specified which intent the bot should try to match first, that's part of the execution language. This approach allows us to reuse these intents (for example, in another bot we might need to ask the user for their name, not just after the greeting intent).
Execution Definition Language
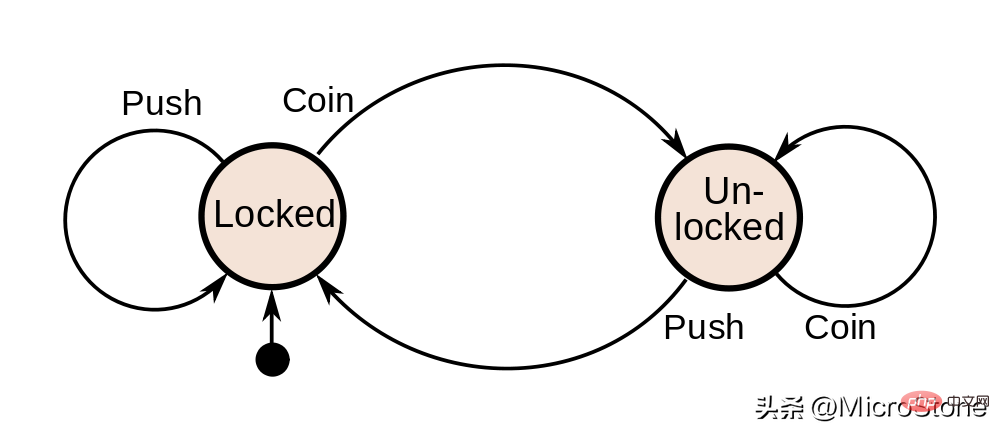
Use execution files to define a state machine that describes how the robot responds to intents/events and can make transitions. This allows the bot designer to view the execution file and understand the entire conversation flow.
Each state in the execution language contains 3 parts
- Body (optional): The reaction that the robot performs when entering the state.
- Next (required): Defines outbound conversion, expressed as condition –> State. When an event/intent is received, the condition is evaluated and if the transition is met, the execution engine moves to the specified state and executes its corresponding reaction. It should be noted that conversion conditions can be very complex. They are true guards, meaning that if the entire condition is not true, the transition is not navigable and the engine will remain in its current state.
- Fallback (optional): This section can contain arbitrary code (just like the Body section) and will be executed if the engine cannot find a navigable transition these codes.
The execution model also contains 2 special states:
- Init:是创建用户会话时进入的常规状态。它可以包含 Body、_Next_和 Fallback 部分。
- Default_Fallback:它只能包含 Body 部分,并且不能作为转换的目标状态。该状态表示在当前状态中未定义本地回退时执行的默认回退代码。该状态可用于打印通用错误消息(例如,“抱歉,我没明白您的意思”),而本地回退则可以打印针对当前状态的定制消息(例如,“请回答是或否”)。
最后,一个状态可以定义一个单一的通配符转换(使用保留字符___作为转换条件),当计算状态主体时将自动导航。这使我们能够在多个地方重用相同的代码并模块化执行逻辑。下面是一个简单的机器人示例,它只回复问候意图,询问用户名并向用户问好。这个机器人的回复可以通过我们基于 React 的聊天小部件显示。
//We can always have an init state in case we need to initialize some bot parameters (e.g. welcoming message)
Init {
Next {
//Here we state that the bot will first listen for an utterance matching the Hello intent, it will ignore anything else
intent == Hello --> HandleHello
}
}
HandleHello {
Body {
ReactPlatform.Reply("你好, 你叫什么名字?")
}
Next {
//We wait for the user to input the name, no other transition is possible at this point
//Obviously, in more complex bots we may have several possible outgoing transitions in a given state
intent == MyNameIs --> HandleMyNameIs
}
}
HandleMyNameIs {
Body {
ReactPlatform.Reply("你好 " + context.get("Greetings").get("name"))
}
Next {
// An automatic transition to the Init state since at this point the conversation is finished and we can start again
_ --> Init
}
}
// Default Fallback state could go hereThe above is the detailed content of Summary of experience in chatbot design based on state machine. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1387
1387
 52
52

 The second generation Ameca is here! He can communicate with the audience fluently, his facial expressions are more realistic, and he can speak dozens of languages.
Mar 04, 2024 am 09:10 AM
The second generation Ameca is here! He can communicate with the audience fluently, his facial expressions are more realistic, and he can speak dozens of languages.
Mar 04, 2024 am 09:10 AM
The humanoid robot Ameca has been upgraded to the second generation! Recently, at the World Mobile Communications Conference MWC2024, the world's most advanced robot Ameca appeared again. Around the venue, Ameca attracted a large number of spectators. With the blessing of GPT-4, Ameca can respond to various problems in real time. "Let's have a dance." When asked if she had emotions, Ameca responded with a series of facial expressions that looked very lifelike. Just a few days ago, EngineeredArts, the British robotics company behind Ameca, just demonstrated the team’s latest development results. In the video, the robot Ameca has visual capabilities and can see and describe the entire room and specific objects. The most amazing thing is that she can also
 How to restore the chat if WeChat does not display it? WeChat does not display the chat recovery method
Mar 13, 2024 pm 01:50 PM
How to restore the chat if WeChat does not display it? WeChat does not display the chat recovery method
Mar 13, 2024 pm 01:50 PM
WeChat, as one of the most popular social software nowadays, provides rich chat functions. But sometimes, we may encounter "Don't show this chat" situation, causing some important conversations to be hidden. To restore these chats, it's actually very simple. As long as you follow these steps, you can easily restore hidden chats and continue to enjoy the convenient communication experience brought by WeChat. How to restore the chat if WeChat does not display it? WeChat does not display the chat recovery method. Method 1: Try to directly search for the name or keyword of the chat partner in the WeChat message list. If the search is found, click to enter the chat interface, so that the chat can be restored and displayed. Method two, restore through friend chat: Open WeChat, click on the address book, find the friend who is displayed in the hidden chat, and click to send a message
 How can AI make robots more autonomous and adaptable?
Jun 03, 2024 pm 07:18 PM
How can AI make robots more autonomous and adaptable?
Jun 03, 2024 pm 07:18 PM
In the field of industrial automation technology, there are two recent hot spots that are difficult to ignore: artificial intelligence (AI) and Nvidia. Don’t change the meaning of the original content, fine-tune the content, rewrite the content, don’t continue: “Not only that, the two are closely related, because Nvidia is expanding beyond just its original graphics processing units (GPUs). The technology extends to the field of digital twins and is closely connected to emerging AI technologies. "Recently, NVIDIA has reached cooperation with many industrial companies, including leading industrial automation companies such as Aveva, Rockwell Automation, Siemens and Schneider Electric, as well as Teradyne Robotics and its MiR and Universal Robots companies. Recently,Nvidiahascoll
 After 2 months, the humanoid robot Walker S can fold clothes
Apr 03, 2024 am 08:01 AM
After 2 months, the humanoid robot Walker S can fold clothes
Apr 03, 2024 am 08:01 AM
Editor of Machine Power Report: Wu Xin The domestic version of the humanoid robot + large model team completed the operation task of complex flexible materials such as folding clothes for the first time. With the unveiling of Figure01, which integrates OpenAI's multi-modal large model, the related progress of domestic peers has been attracting attention. Just yesterday, UBTECH, China's "number one humanoid robot stock", released the first demo of the humanoid robot WalkerS that is deeply integrated with Baidu Wenxin's large model, showing some interesting new features. Now, WalkerS, blessed by Baidu Wenxin’s large model capabilities, looks like this. Like Figure01, WalkerS does not move around, but stands behind a desk to complete a series of tasks. It can follow human commands and fold clothes
 The first robot to autonomously complete human tasks appears, with five fingers that are flexible and fast, and large models support virtual space training
Mar 11, 2024 pm 12:10 PM
The first robot to autonomously complete human tasks appears, with five fingers that are flexible and fast, and large models support virtual space training
Mar 11, 2024 pm 12:10 PM
This week, FigureAI, a robotics company invested by OpenAI, Microsoft, Bezos, and Nvidia, announced that it has received nearly $700 million in financing and plans to develop a humanoid robot that can walk independently within the next year. And Tesla’s Optimus Prime has repeatedly received good news. No one doubts that this year will be the year when humanoid robots explode. SanctuaryAI, a Canadian-based robotics company, recently released a new humanoid robot, Phoenix. Officials claim that it can complete many tasks autonomously at the same speed as humans. Pheonix, the world's first robot that can autonomously complete tasks at human speeds, can gently grab, move and elegantly place each object to its left and right sides. It can autonomously identify objects
 Cloud Whale Xiaoyao 001 sweeping and mopping robot has a 'brain'! | Experience
Apr 26, 2024 pm 04:22 PM
Cloud Whale Xiaoyao 001 sweeping and mopping robot has a 'brain'! | Experience
Apr 26, 2024 pm 04:22 PM
Sweeping and mopping robots are one of the most popular smart home appliances among consumers in recent years. The convenience of operation it brings, or even the need for no operation, allows lazy people to free their hands, allowing consumers to "liberate" from daily housework and spend more time on the things they like. Improved quality of life in disguised form. Riding on this craze, almost all home appliance brands on the market are making their own sweeping and mopping robots, making the entire sweeping and mopping robot market very lively. However, the rapid expansion of the market will inevitably bring about a hidden danger: many manufacturers will use the tactics of sea of machines to quickly occupy more market share, resulting in many new products without any upgrade points. It is also said that they are "matryoshka" models. Not an exaggeration. However, not all sweeping and mopping robots are
 The humanoid robot can do magic, let the Spring Festival Gala program team find out more
Feb 04, 2024 am 09:03 AM
The humanoid robot can do magic, let the Spring Festival Gala program team find out more
Feb 04, 2024 am 09:03 AM
In the blink of an eye, robots have learned to do magic? It was seen that it first picked up the water spoon on the table and proved to the audience that there was nothing in it... Then it put the egg-like object in its hand, then put the water spoon back on the table and started to "cast a spell"... …Just when it picked up the water spoon again, a miracle happened. The egg that was originally put in disappeared, and the thing that jumped out turned into a basketball... Let’s look at the continuous actions again: △ This animation shows a set of actions at 2x speed, and it flows smoothly. Only by watching the video repeatedly at 0.5x speed can it be understood. Finally, I discovered the clues: if my hand speed were faster, I might be able to hide it from the enemy. Some netizens lamented that the robot’s magic skills were even higher than their own: Mag was the one who performed this magic for us.
 Ten humanoid robots shaping the future
Mar 22, 2024 pm 08:51 PM
Ten humanoid robots shaping the future
Mar 22, 2024 pm 08:51 PM
The following 10 humanoid robots are shaping our future: 1. ASIMO: Developed by Honda, ASIMO is one of the most well-known humanoid robots. Standing 4 feet tall and weighing 119 pounds, ASIMO is equipped with advanced sensors and artificial intelligence capabilities that allow it to navigate complex environments and interact with humans. ASIMO's versatility makes it suitable for a variety of tasks, from assisting people with disabilities to delivering presentations at events. 2. Pepper: Created by Softbank Robotics, Pepper aims to be a social companion for humans. With its expressive face and ability to recognize emotions, Pepper can participate in conversations, help in retail settings, and even provide educational support. Pepper's
