
 Technology peripherals
AI
An article briefly describing the current situation and prospects of driverless driving
Technology peripherals
AI
An article briefly describing the current situation and prospects of driverless driving
An article briefly describing the current situation and prospects of driverless driving

With the development of science and technology and the continuous improvement of people's living standards, driverless technology has gradually entered people's lives. The traditional automobile industry has also been affected to a certain extent. Taking Tesla and BYD as examples, many Car companies and Internet companies such as Baidu have also started or are preparing to start research and development of driverless technology.
However, due to the immaturity of the technology, frequent accidents and the leakage of private privacy caused by the collection of huge data have been troubled by R&D personnel and the currently not large number of users. There are still certain bottlenecks in the perception, recognition and decision-making systems of unmanned driving systems, and the overall stability and reliability need to be improved. Only when autonomous driving enters the stage of large-scale use and the safety factor reaches a certain level can we verify whether autonomous driving can achieve true commercialization.
Based on the support of national policies and the trend of global warming, driverless technology is being driven by all walks of life and will become the main way for people to travel in the future. However, There is still a long way to go.
1 Introduction
1.1 The definition of driverless driving
Unmanned driving is a kind of mobile outdoor Important applications of robots in transportation. Unmanned driving technology requires a combination of advanced technologies such as computers, communications, positioning, identification, machine vision, and artificial intelligence. The unmanned vehicle system is a comprehensive system that integrates environmental awareness, planning and decision-making, multi-stage assisted driving and other functions. It is a vehicle system that fully considers the integration of vehicles and roads and coordinates planning. It is also an important part of the intelligent transportation system. .
1.2 Domestic and international development status and trends
1.2.1 Domestic and international development status
(1) Domestic development status
The Chinese government attaches great importance to the research and development of driverless technology. As early as the first half of 2015, the State Council issued the "Made in China" 2025" document, which states that by 2020, the overall technology and key technologies of intelligent assisted driving will be mastered, and an independent research and development system and production supporting system for intelligent connected vehicles will be initially established. At present, it seems that the goal has been basically completed. By 2025, master the overall technology and key technologies of autonomous driving, establish a relatively complete independent research and development system, production supporting system and industrial cluster for intelligent connected vehicles, and basically complete the transformation and upgrading of the automobile industry.
In the first half of this year, Baidu Luobo Kuaipao has obtained China’s first batch of unmanned manned service licenses on public roads, allowing it to operate without anyone behind the wheel. That is, the service is carried out on the public roads in Yizhuang, Beijing, when there is no one in the driving seat.

##Figure 1-1 Baidu Apollo officially launched autonomous driving manned testing in Cangzhou
At present, many domestic companies, such as Baidu and BYD, have also devoted themselves to the research and development of driverless cars. Many practical problems that plague driverless technology, such as complex road conditions, cluttered roads with pedestrians, and driving in rainy and snowy weather, have also been solved or will be solved through the efforts of the R&D team.
(2) Current situation of foreign development
Compared with China, developed countries have Research on driverless cars began in the 1970s, and currently, the United States and Germany are in the first echelon. Some famous universities in the United States have also invested in research and development work, such as the Massachusetts Institute of Technology and Carnegie Mellon University, which began to study driverless vehicles in the 1980s. However, due to technical bottlenecks and limitations in hardware level, it was not until the late 1980s and early 1990s that countries gradually shifted their research focus to assisted driving projects for civilian vehicles on highways, which had relatively simple problems.

Figure 1-2 Google driverless car
In 2010, Google developed 7 autonomous vehicles and conducted actual urban road tests on them. These self-driving vehicles can operate correctly, have good perception capabilities and a high level of artificial intelligence, and can automatically recognize traffic lights, pedestrians and vehicles. Nevada, Florida and California have enacted and passed laws specifically targeting driverless vehicles.
1.2.2 Development Trend
From the perspective of development trend, in the future development of science and technology, no one will Driving will be an important development direction. Autonomous driving technology involves a huge industrial chain. In the process of research and development of autonomous driving technology by various countries and major high-tech companies, it will not only promote the sustainable development and development of the automobile industry, but also promote the sustainable development of the automobile industry. Green development will also drive development in other fields.
2 Benefits of driverless technology
2.1 Economic benefits
Once a self-driving vehicle Fully integrated into our daily vehicles and road transport systems, they will bring huge economic benefits to society as a whole. For reference, more than 200,000 traffic accidents occur in China every year, with direct economic losses exceeding 1.2 billion yuan. Even if self-driving cars can only reduce accidents by 10%, they can save 120 million yuan.
With autonomous vehicles initially replacing traditional park logistics vehicles and community express tricycles to improve factory utilization and productivity, current logistics systems are likely to be the first to be affected. Self-driving vehicles can take over the work and give drivers enough rest time, diverting human resources to the construction of other industries. All cars, special vehicles and mobile devices with autonomous driving technology can be connected to the network system. In this network system, due to the huge network effect, the operating cost per unit time is greatly reduced.
2.2 Reduce the accident rate

Figure 2-2 Traffic accidents caused by human factors
According to statistics, 90% of road traffic accidents are caused by human errors, of which distraction, fatigue, drunk driving and speeding account for a considerable proportion. Every year, 1.3 million people die in traffic accidents around the world, and more than 60,000 people die in China alone. Self-driving cars will eliminate all accidents caused by human error, which will actually significantly reduce accident rates.
Abroad, according to a former Russian news agency report, Russian Deputy Minister of Transport Kirill Bogdanov said that after driverless cars are on the road in Russia, by 2030 By 2020, the number of domestic traffic accident deaths can be reduced by 8%. Bogdanov said: "After driverless cars are on Russian roads, the number of traffic accident deaths can be reduced by 8% by 2030. The use of driverless trucks can reduce costs by 15% and increase freight speed by 25%. This It is a figure calculated by the Ministry of Transport and written into the digital transformation strategy prepared. We have started working with the business community, freight companies and research and development parties to implement the 'unmanned logistics corridor' project that was previously approved by the Russian government."
2.3 Improve the environment and air quality
The best way to realize autonomous vehicles is electrification, including pure electricity or fuel cells. At present, special vehicles have emerged at home and abroad, such as Tesla, NIO, BYD and many other new energy vehicle companies. While fuel-burning vehicles are not responsible for all pollution, they are still one of the core contributors. Gas-powered vehicles emit more exhaust fumes at high speeds, when braking and re-accelerating. While electric cars are not truly emission-free, actual emissions are still significantly reduced.
Self-driving vehicles are also optimized for acceleration, braking and shifting, helping to improve fuel efficiency and reduce greenhouse gas emissions. Consulting firm McKinsey said driverless cars could help reduce 300 million tons of greenhouse gas emissions each year, accounting for half of the aviation industry's carbon dioxide emissions.
2.4 Facilitate travel for special groups
Take our country as an example. To drive a car in the country, you need to hold a motor vehicle driving license for the corresponding model. However, there are currently Some special groups, such as color blindness, the elderly and the disabled. According to statistics from my country's authoritative departments, the number of color blind people in my country has exceeded tens of millions. There are approximately 249.49 million elderly people (60 years old and above) in my country, accounting for the total population. 17.9%. Some scholars predict that the elderly population will reach 480 million by 2050. The aging of society not only affects the economy, medical care and pension security, but also poses a huge challenge to the transportation system.

##Figure 2-3 Blind Steve Mahan rides in the Google Firefly self-driving car
This type of people are unable to obtain a motor vehicle driving license due to physical factors. Unmanned driving technology can help this type of people travel, and when the technology matures, it will not cause danger to themselves or others.
2.5 Save more time
Self-driving vehicles can detect and communicate with other vehicles around them, making random stops, lane changes and traffic jams The behavior will become a thing of the past, which makes traffic more orderly and avoids small scratches and collisions at low speeds. The corresponding vehicle speed will be faster than now, and people's travel efficiency will be higher.

##Figure 2-4 Traffic congestion caused by human factors
None Human-driven cars not only help reduce traffic accidents but also significantly reduce traffic congestion. According to a KPMG report, driverless vehicles could help increase the capacity of highways to accommodate vehicles by five times. Sebastian Thrun, a computer expert at Stanford University and a former expert on Google's self-driving car project, said that once robot cars become mainstream, only 30% of the cars on the road will be needed currently. McKinsey & Company estimates that self-driving cars could save drivers around the world a billion hours of time every day.2.6 Parking Problem Solved
The spread of self-driving cars means you don’t have to look around for a parking spot as they are delivered to you Once at your destination, it will find the ideal parking spot on its own. Even if you decide to buy your own self-driving car, you won't have to worry about finding a parking space because it can find one. This has a big impact on the city. According to a recent Bank of America report, 31% of urban areas are currently dedicated to parking. As car ownership declines, the need for parking spaces decreases and parking spaces can be converted into residential areas.
3 Disadvantages of driverless technology
3.1 Hacker attack
In real life, there are hackers Cases of hacking into human-driven vehicles. In 2014, hackers exploited vulnerabilities in the car's digital service system to remotely open the doors of 2.2 million cars; in 2015, hackers remotely attacked a moving car and performed deceleration, braking and other checks, resulting in the loss of 1.4 million cars worldwide. Cars were recalled; in 2016, after hackers exploited a vulnerability in a car app to obtain driver information and drain the car's power, the manufacturer immediately disabled the app to prevent hackers from breaking in again.
Compared with the traditional automobile industry, autonomous driving uses a large number of technological means and is controlled by already designed programs and artificial intelligence chips. For this type of system. All automated systems are at risk of being attacked or crashing by errors or bugs. No system is infallible. If a hacker can enter the car system, it can control the car to do anything, threatening the lives and property of passengers.3.2 Over-reliance on satellite navigation technology
Automakers are looking for the next generation of disruptive automotive technology. For example, Elon Musk's space company SpaceX is distributing satellites in orbit. They become critical tools for processing the vast amounts of data required for driving.

Figure 3-1 Tesla electric car cannot connect to the network in the underground garage
US Investment Bank Morgan Stanley says self-driving cars generate up to 40 terabytes of data per hour from cameras, radars and other sensors and use this data to navigate the road. That’s the total data collected by the iPhone over 3,000 years. Although most new cars have modems mounted under the dashboard and receive data from the same towers that serve cell phones, coverage can be uneven, which is one of the biggest challenges facing self-driving cars.
Once the signal of a self-driving car is interfered with or even interrupted, self-driving will be impossible.
3.3 Insufficient supporting highway infrastructure
The best way to realize autonomous vehicles is electrification, but at present, tram charging piles are distributed in some domestic cities The density is not as good as that of gas stations. In addition, the charging time of electric cars is significantly longer than that of gas cars, so there are often long queues at charging piles, which greatly reduces the user experience.

Figure 3-2 Tram charging pile
In addition, many countries Affected by infrastructure issues. For example, in India, roads are the biggest challenge. Poor driving roads pose challenges for self-driving vehicles. Self-driving vehicles require predictable roads and well-defined lanes. It would be difficult for semi- or fully autonomous vehicles to drive on these roads due to poor road markings or design. The risk of accidents increases and there is a serious risk of computer algorithms making incorrect decisions.
3.4 Problems in the transition stage
According to the forecast of IHS Global Insight, a well-known global business consulting organization, in the next 10-15 years, the number of autonomous vehicles will increase It will gradually increase to 9.2%, with at least 9 self-driving cars for every 100 cars. In the stage where traditional vehicles and autonomous vehicles coexist, the greatest challenges are posed to the practicality, reliability and safety of autonomous vehicles.
How to make driverless cars and traditional cars coexist harmoniously, reduce the possibility of accidents between the two, and reduce the impact on traditional cars as much as possible while promoting driverless cars The impact on driving safety on the road has also become a major problem that technicians currently need to overcome. When autonomous driving technology matures and the market share of driverless cars increases, this problem will be alleviated accordingly.
3.5 The current cost is too high
Similar to the development of other industries, the development of autonomous driving technology also requires years of development and testing. The cost is high at the current stage. According to estimates by authoritative organizations, the cost of self-driving cars currently being tested is as high as about 300,000 US dollars, and can even reach more than 3 million yuan in China. However, as time goes by, the popularity of self-driving cars and the Healthy competition among self-driving car companies may lead to a significant reduction in the price of self-driving cars.
4 Conclusion and Outlook
Currently, autonomous driving technology at home and abroad has developed rapidly, and cars have more and more high technologies, which solve many problems. It solves the problems that people encounter in daily travel and even daily life. After the widespread use of driverless cars in society, it not only solves the need for commuting to get off work, but also allows people living in surrounding areas to more conveniently enjoy education and education in first-tier cities. Supporting services such as medical care and entertainment will make this society better and better and make people's lives better.
However, the current driverless technology is not yet mature, and there are still many technical problems that need to be overcome by scientific researchers. I believe that in the near future, the problems will be solved, making driverless cars truly accessible to humans. Life.
The above is the detailed content of An article briefly describing the current situation and prospects of driverless driving. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1378
1378
 52
52

 The Stable Diffusion 3 paper is finally released, and the architectural details are revealed. Will it help to reproduce Sora?
Mar 06, 2024 pm 05:34 PM
The Stable Diffusion 3 paper is finally released, and the architectural details are revealed. Will it help to reproduce Sora?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3’s paper is finally here! This model was released two weeks ago and uses the same DiT (DiffusionTransformer) architecture as Sora. It caused quite a stir once it was released. Compared with the previous version, the quality of the images generated by StableDiffusion3 has been significantly improved. It now supports multi-theme prompts, and the text writing effect has also been improved, and garbled characters no longer appear. StabilityAI pointed out that StableDiffusion3 is a series of models with parameter sizes ranging from 800M to 8B. This parameter range means that the model can be run directly on many portable devices, significantly reducing the use of AI
 Have you really mastered coordinate system conversion? Multi-sensor issues that are inseparable from autonomous driving
Oct 12, 2023 am 11:21 AM
Have you really mastered coordinate system conversion? Multi-sensor issues that are inseparable from autonomous driving
Oct 12, 2023 am 11:21 AM
The first pilot and key article mainly introduces several commonly used coordinate systems in autonomous driving technology, and how to complete the correlation and conversion between them, and finally build a unified environment model. The focus here is to understand the conversion from vehicle to camera rigid body (external parameters), camera to image conversion (internal parameters), and image to pixel unit conversion. The conversion from 3D to 2D will have corresponding distortion, translation, etc. Key points: The vehicle coordinate system and the camera body coordinate system need to be rewritten: the plane coordinate system and the pixel coordinate system. Difficulty: image distortion must be considered. Both de-distortion and distortion addition are compensated on the image plane. 2. Introduction There are four vision systems in total. Coordinate system: pixel plane coordinate system (u, v), image coordinate system (x, y), camera coordinate system () and world coordinate system (). There is a relationship between each coordinate system,
 This article is enough for you to read about autonomous driving and trajectory prediction!
Feb 28, 2024 pm 07:20 PM
This article is enough for you to read about autonomous driving and trajectory prediction!
Feb 28, 2024 pm 07:20 PM
Trajectory prediction plays an important role in autonomous driving. Autonomous driving trajectory prediction refers to predicting the future driving trajectory of the vehicle by analyzing various data during the vehicle's driving process. As the core module of autonomous driving, the quality of trajectory prediction is crucial to downstream planning control. The trajectory prediction task has a rich technology stack and requires familiarity with autonomous driving dynamic/static perception, high-precision maps, lane lines, neural network architecture (CNN&GNN&Transformer) skills, etc. It is very difficult to get started! Many fans hope to get started with trajectory prediction as soon as possible and avoid pitfalls. Today I will take stock of some common problems and introductory learning methods for trajectory prediction! Introductory related knowledge 1. Are the preview papers in order? A: Look at the survey first, p
 DualBEV: significantly surpassing BEVFormer and BEVDet4D, open the book!
Mar 21, 2024 pm 05:21 PM
DualBEV: significantly surpassing BEVFormer and BEVDet4D, open the book!
Mar 21, 2024 pm 05:21 PM
This paper explores the problem of accurately detecting objects from different viewing angles (such as perspective and bird's-eye view) in autonomous driving, especially how to effectively transform features from perspective (PV) to bird's-eye view (BEV) space. Transformation is implemented via the Visual Transformation (VT) module. Existing methods are broadly divided into two strategies: 2D to 3D and 3D to 2D conversion. 2D-to-3D methods improve dense 2D features by predicting depth probabilities, but the inherent uncertainty of depth predictions, especially in distant regions, may introduce inaccuracies. While 3D to 2D methods usually use 3D queries to sample 2D features and learn the attention weights of the correspondence between 3D and 2D features through a Transformer, which increases the computational and deployment time.
 The first multi-view autonomous driving scene video generation world model | DrivingDiffusion: New ideas for BEV data and simulation
Oct 23, 2023 am 11:13 AM
The first multi-view autonomous driving scene video generation world model | DrivingDiffusion: New ideas for BEV data and simulation
Oct 23, 2023 am 11:13 AM
Some of the author’s personal thoughts In the field of autonomous driving, with the development of BEV-based sub-tasks/end-to-end solutions, high-quality multi-view training data and corresponding simulation scene construction have become increasingly important. In response to the pain points of current tasks, "high quality" can be decoupled into three aspects: long-tail scenarios in different dimensions: such as close-range vehicles in obstacle data and precise heading angles during car cutting, as well as lane line data. Scenes such as curves with different curvatures or ramps/mergings/mergings that are difficult to capture. These often rely on large amounts of data collection and complex data mining strategies, which are costly. 3D true value - highly consistent image: Current BEV data acquisition is often affected by errors in sensor installation/calibration, high-precision maps and the reconstruction algorithm itself. this led me to
 GSLAM | A general SLAM architecture and benchmark
Oct 20, 2023 am 11:37 AM
GSLAM | A general SLAM architecture and benchmark
Oct 20, 2023 am 11:37 AM
Suddenly discovered a 19-year-old paper GSLAM: A General SLAM Framework and Benchmark open source code: https://github.com/zdzhaoyong/GSLAM Go directly to the full text and feel the quality of this work ~ 1 Abstract SLAM technology has achieved many successes recently and attracted many attracted the attention of high-tech companies. However, how to effectively perform benchmarks on speed, robustness, and portability with interfaces to existing or emerging algorithms remains a problem. In this paper, a new SLAM platform called GSLAM is proposed, which not only provides evaluation capabilities but also provides researchers with a useful way to quickly develop their own SLAM systems.
 'Minecraft' turns into an AI town, and NPC residents role-play like real people
Jan 02, 2024 pm 06:25 PM
'Minecraft' turns into an AI town, and NPC residents role-play like real people
Jan 02, 2024 pm 06:25 PM
Please note that this square man is frowning, thinking about the identities of the "uninvited guests" in front of him. It turned out that she was in a dangerous situation, and once she realized this, she quickly began a mental search to find a strategy to solve the problem. Ultimately, she decided to flee the scene and then seek help as quickly as possible and take immediate action. At the same time, the person on the opposite side was thinking the same thing as her... There was such a scene in "Minecraft" where all the characters were controlled by artificial intelligence. Each of them has a unique identity setting. For example, the girl mentioned before is a 17-year-old but smart and brave courier. They have the ability to remember and think, and live like humans in this small town set in Minecraft. What drives them is a brand new,
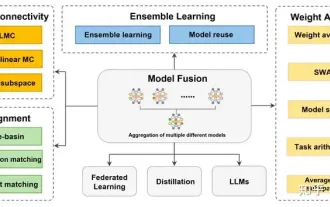 Review! Deep model fusion (LLM/basic model/federated learning/fine-tuning, etc.)
Apr 18, 2024 pm 09:43 PM
Review! Deep model fusion (LLM/basic model/federated learning/fine-tuning, etc.)
Apr 18, 2024 pm 09:43 PM
In September 23, the paper "DeepModelFusion:ASurvey" was published by the National University of Defense Technology, JD.com and Beijing Institute of Technology. Deep model fusion/merging is an emerging technology that combines the parameters or predictions of multiple deep learning models into a single model. It combines the capabilities of different models to compensate for the biases and errors of individual models for better performance. Deep model fusion on large-scale deep learning models (such as LLM and basic models) faces some challenges, including high computational cost, high-dimensional parameter space, interference between different heterogeneous models, etc. This article divides existing deep model fusion methods into four categories: (1) "Pattern connection", which connects solutions in the weight space through a loss-reducing path to obtain a better initial model fusion
