
 Technology peripherals
AI
Are you serious? Let the robot dog be the goalkeeper and publish a paper
Technology peripherals
AI
Are you serious? Let the robot dog be the goalkeeper and publish a paper
Are you serious? Let the robot dog be the goalkeeper and publish a paper

Is it reliable to let a robot dog serve as a football goalkeeper? Whether it is reliable or not, let’s see the effect first and then draw a conclusion.
The staff made a very mild attack, and the robot dog blocked the ball:

More difficult, It’s no problem to score a parabolic goal:

Is it suspected of cheating to throw the ball by hand? Try it with your feet, and the robot dog can also defend the goal.

Interestingly, the study also tried to use a robot dog to Play football, and the other one will be the goalkeeper. It’s great that the two robot dogs can play by themselves:

After seeing the effect, I feel like the robot dog is the goalkeeper. Pretty reliable. This robot dog is Mini Cheetah, which was developed by MIT in 2019. Now researchers from the University of California, Berkeley and other institutions have deployed a new reinforcement learning framework for Mini Cheetah, allowing it to complete football goalkeeping tasks with a goalkeeping success rate of 87.5%. .
Paper address: https://arxiv.org/pdf/2210.04435.pdf
Kick the ball 4 meters away
Mini Cheetah successfully kept goal in less than 1 second
It is still difficult for Mini Cheetah to learn to keep goal, because it involves the height and dynamics of the object (such as the ball) being thrown Moving position, specifically, one side manipulates a fast-moving ball whose direction and position are uncertain, while the other side needs to quickly judge the ball's position to prevent a goal. Accomplishing this requires teaching the robot to dynamically move its body while ensuring that its feet (or face) get to where they need to be to block the ball in time, which is basically two puzzles rolled into one.
The solution of this research is to combine the motion controller with the end effector trajectory planning, so that the best way can be found to make Mini Cheetah before the ball reaches the target. Within one second, block.
To complete the above process, Mini Cheetah also needs to be trained to master a set of useful goalkeeping skills. For example, Mini Cheetah needs to master sideways interception of the ball near and near the ground, and master diving. Technique to reach the lower corner of the goal, jump to the top and upper corner of the goal. After completing these actions, Mini Cheetah can recover and finally land safely. Reference movements for each skill are manually programmed, trained in simulation, and then transferred directly to the robot.
The goal defended by Mini Cheetah is 1.5m wide and 0.9m high, the ball (number 3) is kicked from about 4m away, the ball is tracked externally and then Mini Cheetah blocks it. The performance of such a small robot dog to complete the ball-blocking action is impressive.

The research shows that the robot dog system can transfer the dynamic movements and goalkeeping skills learned in simulation to a real quadruped. On the robot, the goalkeeping success rate against random shots in the real world was 87.5%. The average success rate for human soccer goalkeepers is 69%. The researchers say their proposed framework can be extended to other scenarios, such as multi-skill football.
Let’s take a look at the framework behind this robot dog.
Hierarchical Reinforcement Learning Framework
First of all, making a four-legged robot a football goalkeeper is a very challenging problem, because it must simultaneously solve the problem of predicting the trajectory of an object and capturing non-grabbing objects. Two practical problems with holding objects (spheres). The robot needs to react to and intercept a ball flying in the air within a very short period of time (usually less than a second).
To accomplish this challenge, the research team proposed a hierarchical model-free reinforcement learning (RL) framework. The framework contains a multiple control strategy for different motor skills, covering different areas of the target.

These control strategies allow the robot to track the trajectories of randomly parameterized end effectors while performing specific motor skills such as jumping to block the ball, diving The ball and the ball are stopped rolling on the ground.

#The RL framework contains a high-level planner that helps the robot determine the required locomotor skills and plan the end-effector trajectory to intercept the fly direction Balls in different target areas.
This research deployed the above RL framework on the Mini Cheetah quadruped robot proposed by MIT in 2019. Experiments show that this RL framework can allow the quadruped robot to effectively intercept fast movements in the real world. ball.

Previous research on the RL framework of quadruped robots mainly focused on low-level motion control, such as making the robot walk at a required speed and imitating reference motion. The framework proposed in this study extends the learned motor skills to higher-level tasks, successfully using advanced planning to allow a quadruped robot to accurately intercept a fast-moving football with agile movements. This has important implications for advanced planning control of quadruped robots.
The above is the detailed content of Are you serious? Let the robot dog be the goalkeeper and publish a paper. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 The Stable Diffusion 3 paper is finally released, and the architectural details are revealed. Will it help to reproduce Sora?
Mar 06, 2024 pm 05:34 PM
The Stable Diffusion 3 paper is finally released, and the architectural details are revealed. Will it help to reproduce Sora?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3’s paper is finally here! This model was released two weeks ago and uses the same DiT (DiffusionTransformer) architecture as Sora. It caused quite a stir once it was released. Compared with the previous version, the quality of the images generated by StableDiffusion3 has been significantly improved. It now supports multi-theme prompts, and the text writing effect has also been improved, and garbled characters no longer appear. StabilityAI pointed out that StableDiffusion3 is a series of models with parameter sizes ranging from 800M to 8B. This parameter range means that the model can be run directly on many portable devices, significantly reducing the use of AI
 Yunshen releases industry application flagship robot dog Jueying X30
Oct 11, 2023 pm 09:45 PM
Yunshen releases industry application flagship robot dog Jueying X30
Oct 11, 2023 pm 09:45 PM
On October 9, Yunshen Technology released the "Jueying X30" quadruped robot. As a new generation of industry-level products for industry applications, it is targeted at power stations, factories, pipe gallery inspections, emergency rescue, fire investigation, future scientific research, etc. Multi-field core demands bring the world's leading industry capabilities: original integrated sensing capabilities, taking the lead in Asia to achieve rapid and stable obstacle crossing in changing environments, up and down hollow industrial stairs, and all-weather autonomous inspections day and night, breaking more scene restrictions, It can respond quickly to unexpected tasks; for the first time in Asia, the operating temperature range of a quadruped robot has been extended to -20°C to 55°C, significantly broadening the application areas and seasons; it has its own real-time monitoring system and emergency response system to ensure smarter operations. Safe and efficient. Seventeen departments including the Ministry of Industry and Information Technology issued the "Machine
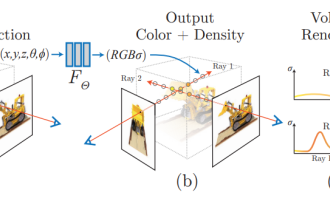 NeRF and the past and present of autonomous driving, a summary of nearly 10 papers!
Nov 14, 2023 pm 03:09 PM
NeRF and the past and present of autonomous driving, a summary of nearly 10 papers!
Nov 14, 2023 pm 03:09 PM
Since Neural Radiance Fields was proposed in 2020, the number of related papers has increased exponentially. It has not only become an important branch of three-dimensional reconstruction, but has also gradually become active at the research frontier as an important tool for autonomous driving. NeRF has suddenly emerged in the past two years, mainly because it skips the feature point extraction and matching, epipolar geometry and triangulation, PnP plus Bundle Adjustment and other steps of the traditional CV reconstruction pipeline, and even skips mesh reconstruction, mapping and light tracing, directly from 2D The input image is used to learn a radiation field, and then a rendered image that approximates a real photo is output from the radiation field. In other words, let an implicit three-dimensional model based on a neural network fit the specified perspective
 ICCV'23 paper award 'Fighting of Gods'! Meta Divide Everything and ControlNet were jointly selected, and there was another article that surprised the judges
Oct 04, 2023 pm 08:37 PM
ICCV'23 paper award 'Fighting of Gods'! Meta Divide Everything and ControlNet were jointly selected, and there was another article that surprised the judges
Oct 04, 2023 pm 08:37 PM
ICCV2023, the top computer vision conference held in Paris, France, has just ended! This year's best paper award is simply a "fight between gods". For example, the two papers that won the Best Paper Award included ControlNet, a work that subverted the field of Vincentian graph AI. Since being open sourced, ControlNet has received 24k stars on GitHub. Whether it is for diffusion models or the entire field of computer vision, this paper's award is well-deserved. The honorable mention for the best paper award was awarded to another equally famous paper, Meta's "Separate Everything" ”Model SAM. Since its launch, "Segment Everything" has become the "benchmark" for various image segmentation AI models, including those that came from behind.
 Paper illustrations can also be automatically generated, using the diffusion model, and are also accepted by ICLR.
Jun 27, 2023 pm 05:46 PM
Paper illustrations can also be automatically generated, using the diffusion model, and are also accepted by ICLR.
Jun 27, 2023 pm 05:46 PM
Generative AI has taken the artificial intelligence community by storm. Both individuals and enterprises have begun to be keen on creating related modal conversion applications, such as Vincent pictures, Vincent videos, Vincent music, etc. Recently, several researchers from scientific research institutions such as ServiceNow Research and LIVIA have tried to generate charts in papers based on text descriptions. To this end, they proposed a new method of FigGen, and the related paper was also included in ICLR2023 as TinyPaper. Picture paper address: https://arxiv.org/pdf/2306.00800.pdf Some people may ask, what is so difficult about generating the charts in the paper? How does this help scientific research?
 Breathing fire and dancing at the same time, the latest skill of the robot dog has become popular all over the Internet! Netizens call it 'True Hot Dog'
Jun 28, 2023 pm 06:20 PM
Breathing fire and dancing at the same time, the latest skill of the robot dog has become popular all over the Internet! Netizens call it 'True Hot Dog'
Jun 28, 2023 pm 06:20 PM
After Musk invented the flamethrower, now even the robot dog can learn to breathe fire. Stand up, aim, and breathe fire, a whole set of actions in one go - not only that, you can even "tap dance" while breathing fire: This magical video quickly gained 7,000+ views on Reddit. Some netizens joked: Thank you Reminds me to revisit Black Mirror. Some netizens suggested renaming it hot dog: "I know someone must call it that." So, what does this "hot dog" look like? What does a fire-breathing robot dog look like? This fire-breathing robot dog is called Themonator and comes from a company called ThrowFlame. According to the official website, its weight is about 16kg (37lbs) and its size is about 76×51×51
 Chat screenshots reveal the hidden rules of AI review! AAAI 3000 yuan is strong accept?
Apr 12, 2023 am 08:34 AM
Chat screenshots reveal the hidden rules of AI review! AAAI 3000 yuan is strong accept?
Apr 12, 2023 am 08:34 AM
Just as the AAAI 2023 paper submission deadline was approaching, a screenshot of an anonymous chat in the AI submission group suddenly appeared on Zhihu. One of them claimed that he could provide "3,000 yuan a strong accept" service. As soon as the news came out, it immediately aroused public outrage among netizens. However, don’t rush yet. Zhihu boss "Fine Tuning" said that this is most likely just a "verbal pleasure". According to "Fine Tuning", greetings and gang crimes are unavoidable problems in any field. With the rise of openreview, the various shortcomings of cmt have become more and more clear. The space left for small circles to operate will become smaller in the future, but there will always be room. Because this is a personal problem, not a problem with the submission system and mechanism. Introducing open r
 CVPR 2023 rankings released, the acceptance rate is 25.78%! 2,360 papers were accepted, and the number of submissions surged to 9,155
Apr 13, 2023 am 09:37 AM
CVPR 2023 rankings released, the acceptance rate is 25.78%! 2,360 papers were accepted, and the number of submissions surged to 9,155
Apr 13, 2023 am 09:37 AM
Just now, CVPR 2023 issued an article saying: This year, we received a record 9155 papers (12% more than CVPR2022), and accepted 2360 papers, with an acceptance rate of 25.78%. According to statistics, the number of submissions to CVPR only increased from 1,724 to 2,145 in the 7 years from 2010 to 2016. After 2017, it soared rapidly and entered a period of rapid growth. In 2019, it exceeded 5,000 for the first time, and by 2022, the number of submissions had reached 8,161. As you can see, a total of 9,155 papers were submitted this year, indeed setting a record. After the epidemic is relaxed, this year’s CVPR summit will be held in Canada. This year it will be a single-track conference and the traditional Oral selection will be cancelled. google research
