
 Technology peripherals
AI
More than twice as fast as a cheetah! Zhejiang University alumnus developed a soft robot that is faster than an F1 racing car and was published in the Nature sub-magazine
Technology peripherals
AI
More than twice as fast as a cheetah! Zhejiang University alumnus developed a soft robot that is faster than an F1 racing car and was published in the Nature sub-magazine
More than twice as fast as a cheetah! Zhejiang University alumnus developed a soft robot that is faster than an F1 racing car and was published in the Nature sub-magazine

"Why are you chasing me?"
"Because I need syrup urgently."

Now, be careful with your emergency syrup, because the soft robot we are going to introduce today can run twice as fast as a cheetah! It is even faster than an F1 car, and can run at a maximum speed of 70 body lengths/s. In comparison, a cheetah runs at about 25 body lengths/s, and an F1 car runs at 50 body lengths/s (body lengths per second). Long representations of relative speeds can quantify the speed of different organisms at various body sizes).
This pace looks a bit like a naive scallop, but be sure not to blink, otherwise it will disappear.
This is an electromagnetic-driven miniature soft robot developed by the Soft Materials Laboratory team of Johannes Kepler University. It is only the size of a postage stamp. It not only runs super fast, but also Able to swim, climb steps, cross obstacles and transport cargo.
The study was published in the journal Nature Communications under the title "Ultrafast small-scale soft electromagnetic robots”.
The corresponding and first author of the article is Dr. Guoyong Mao from China. He graduated from Zhejiang University with a bachelor's degree and a Ph.D., and is currently working at Johannes Kepler does research at the University.
The speed is seventy miles, the body is free
Many animals in nature can move quickly – such as a cheetah or gazelle, where these features are used to help the animal catch prey or hide from predators. For many years, it has been the goal of scientists to create soft and flexible robots with similar speed capabilities. However, the natural flaws of flexible materials, such as slow response and low strength, make most soft robots move slowly.
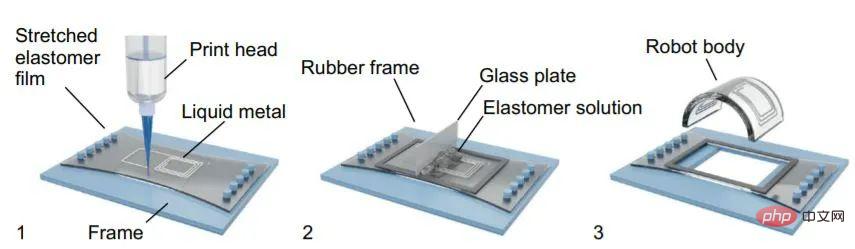
Soft electromagnetic elastomer-based robots (SEMR) usually respond quickly and are easy to miniaturize; soft electromagnetic elastomer actuators can be made by printing liquid metal coils on elastic substrates. By applying an electric current to the liquid metal, the actuator movement can be controlled.
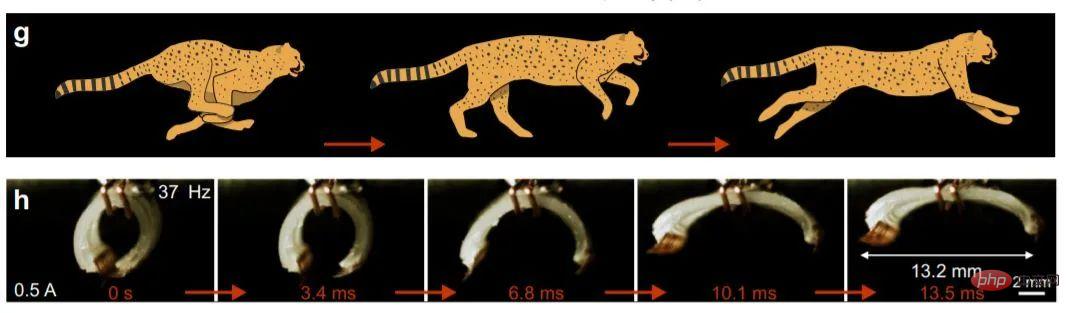
But bending motion like this is far from enough. If you want to give the robot a high degree of movement mechanism, further design is needed. The researchers created bilayer actuators by gluing a pre-stretched layer (top) to an undeformed layer (bottom) so that when the bilayer is released, it curls up, taking advantage of the mismatched strain created by the bilayer. curling and releasing to imitate the movement of a cheetah running.
In addition to the body, the design of the robot’s feet is also very important. The designed L-shaped feet can be Run on various flat surfaces including paper, wood, metal, plastic and glass. However, the greater the friction between the foot material and the flat surface, the faster the robot will run, similar to how a cheetah's claws can firmly grasp the ground.
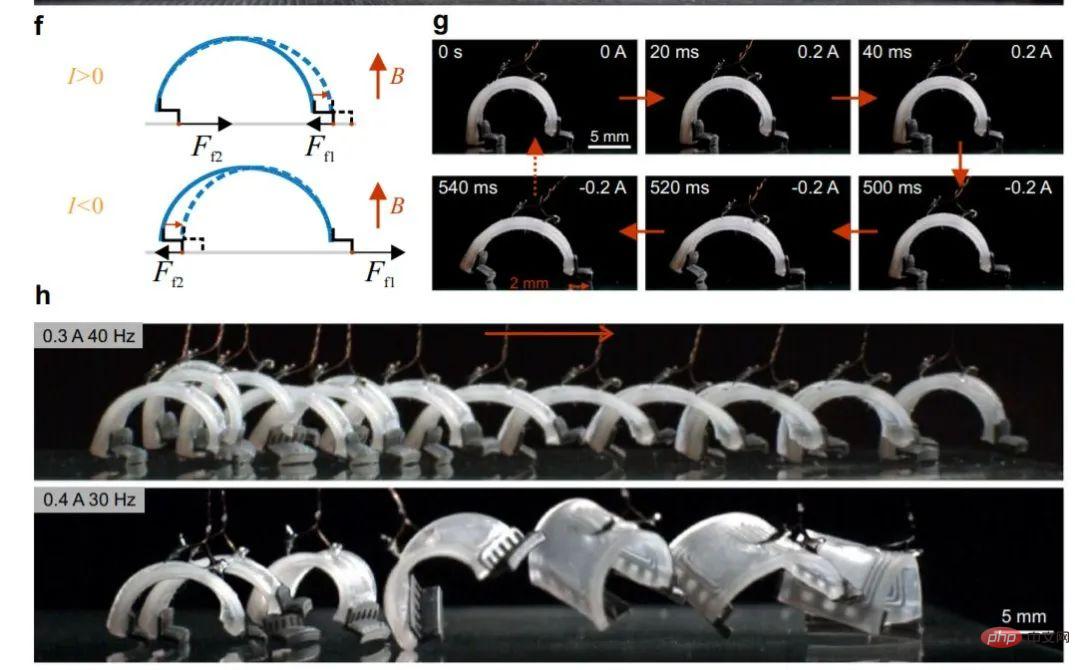
When the robot unfolds, the front feet move forward, while the rear feet are fixed due to mechanical interlocking; then the robot contracts, the front feet are fixed, and the rear feet move toward Pull forward. It reaches ultra-high operating speeds of 70 body lengths/s on 3D corrugated substrates (optimum flat surfaces) and an average of 35 body lengths/s on any other surface.
So far, small robots are driven by a tethered external power supply system. In order to further realize the "freedom" of the robot, the researchers let go of the rope and put a power supply "little bag" on the robot's back - —Customized battery powered printed circuit board (PCB). The robot carrying a schoolbag does not move as fast as before, but it can still reach 2.1 body length/s and swim at a speed of 1.8 body length/s.
Versatility and freedom of movement: not just speed
Beyond high-speed movement , many animals have broader survival strategies, such as resilience to impacts or falls, the ability to avoid obstacles, the ability to cross terrestrial/aquatic boundaries at will, and the ability to transport prey.
The robot also has these capabilities. The researchers conducted durability tests on it, flattening it with heavy objects during walking, and compressing the main body of the robot with a tensile testing machine. It was found to withstand compressive stresses up to 139 atm (2000 N on the main body).
Resilience is not enough, and overcoming obstacles remains challenging for most small robots . The robot can jump over obstacles by applying a pulsed electrical signal. It first contracts and then tilts its body (storing energy in the process), then expands like a compressed spring (releasing energy) and jumps over the obstacle.
In addition to the terrestrial environment, the small robot also learned to swim, relying on its light weight and relatively low average density, it can float on water without further modification; when driven with square wave current (0.5 A, 20 Hz), the robot swims at a maximum speed of 43 mm/s or 4.8 body length/s, if further improvements are made in the future The speed of the fish will be reached.
Paper portal:
https://www.nature.com/ articles/s41467-022-32123-4
The above is the detailed content of More than twice as fast as a cheetah! Zhejiang University alumnus developed a soft robot that is faster than an F1 racing car and was published in the Nature sub-magazine. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1378
1378
 52
52

 How to optimize the performance of debian readdir
Apr 13, 2025 am 08:48 AM
How to optimize the performance of debian readdir
Apr 13, 2025 am 08:48 AM
In Debian systems, readdir system calls are used to read directory contents. If its performance is not good, try the following optimization strategy: Simplify the number of directory files: Split large directories into multiple small directories as much as possible, reducing the number of items processed per readdir call. Enable directory content caching: build a cache mechanism, update the cache regularly or when directory content changes, and reduce frequent calls to readdir. Memory caches (such as Memcached or Redis) or local caches (such as files or databases) can be considered. Adopt efficient data structure: If you implement directory traversal by yourself, select more efficient data structures (such as hash tables instead of linear search) to store and access directory information
 How to implement file sorting by debian readdir
Apr 13, 2025 am 09:06 AM
How to implement file sorting by debian readdir
Apr 13, 2025 am 09:06 AM
In Debian systems, the readdir function is used to read directory contents, but the order in which it returns is not predefined. To sort files in a directory, you need to read all files first, and then sort them using the qsort function. The following code demonstrates how to sort directory files using readdir and qsort in Debian system: #include#include#include#include#include//Custom comparison function, used for qsortintcompare(constvoid*a,constvoid*b){returnstrcmp(*(
 Debian mail server firewall configuration tips
Apr 13, 2025 am 11:42 AM
Debian mail server firewall configuration tips
Apr 13, 2025 am 11:42 AM
Configuring a Debian mail server's firewall is an important step in ensuring server security. The following are several commonly used firewall configuration methods, including the use of iptables and firewalld. Use iptables to configure firewall to install iptables (if not already installed): sudoapt-getupdatesudoapt-getinstalliptablesView current iptables rules: sudoiptables-L configuration
 How to set the Debian Apache log level
Apr 13, 2025 am 08:33 AM
How to set the Debian Apache log level
Apr 13, 2025 am 08:33 AM
This article describes how to adjust the logging level of the ApacheWeb server in the Debian system. By modifying the configuration file, you can control the verbose level of log information recorded by Apache. Method 1: Modify the main configuration file to locate the configuration file: The configuration file of Apache2.x is usually located in the /etc/apache2/ directory. The file name may be apache2.conf or httpd.conf, depending on your installation method. Edit configuration file: Open configuration file with root permissions using a text editor (such as nano): sudonano/etc/apache2/apache2.conf
 How Debian OpenSSL prevents man-in-the-middle attacks
Apr 13, 2025 am 10:30 AM
How Debian OpenSSL prevents man-in-the-middle attacks
Apr 13, 2025 am 10:30 AM
In Debian systems, OpenSSL is an important library for encryption, decryption and certificate management. To prevent a man-in-the-middle attack (MITM), the following measures can be taken: Use HTTPS: Ensure that all network requests use the HTTPS protocol instead of HTTP. HTTPS uses TLS (Transport Layer Security Protocol) to encrypt communication data to ensure that the data is not stolen or tampered during transmission. Verify server certificate: Manually verify the server certificate on the client to ensure it is trustworthy. The server can be manually verified through the delegate method of URLSession
 Debian mail server SSL certificate installation method
Apr 13, 2025 am 11:39 AM
Debian mail server SSL certificate installation method
Apr 13, 2025 am 11:39 AM
The steps to install an SSL certificate on the Debian mail server are as follows: 1. Install the OpenSSL toolkit First, make sure that the OpenSSL toolkit is already installed on your system. If not installed, you can use the following command to install: sudoapt-getupdatesudoapt-getinstallopenssl2. Generate private key and certificate request Next, use OpenSSL to generate a 2048-bit RSA private key and a certificate request (CSR): openss
 How debian readdir integrates with other tools
Apr 13, 2025 am 09:42 AM
How debian readdir integrates with other tools
Apr 13, 2025 am 09:42 AM
The readdir function in the Debian system is a system call used to read directory contents and is often used in C programming. This article will explain how to integrate readdir with other tools to enhance its functionality. Method 1: Combining C language program and pipeline First, write a C program to call the readdir function and output the result: #include#include#include#includeintmain(intargc,char*argv[]){DIR*dir;structdirent*entry;if(argc!=2){
 How to do Debian Hadoop log management
Apr 13, 2025 am 10:45 AM
How to do Debian Hadoop log management
Apr 13, 2025 am 10:45 AM
Managing Hadoop logs on Debian, you can follow the following steps and best practices: Log Aggregation Enable log aggregation: Set yarn.log-aggregation-enable to true in the yarn-site.xml file to enable log aggregation. Configure log retention policy: Set yarn.log-aggregation.retain-seconds to define the retention time of the log, such as 172800 seconds (2 days). Specify log storage path: via yarn.n
