
 Technology peripherals
AI
Controlling a double-jointed robotic arm using Actor-Critic's DDPG reinforcement learning algorithm
Technology peripherals
AI
Controlling a double-jointed robotic arm using Actor-Critic's DDPG reinforcement learning algorithm
Controlling a double-jointed robotic arm using Actor-Critic's DDPG reinforcement learning algorithm

In this article, we will introduce training an intelligent agent to control a dual-jointed robotic arm in the Reacher environment, a Unity-based simulation program developed using the Unity ML-Agents toolkit. Our goal is to reach the target position with high accuracy, so here we can use the state-of-the-art Deep Deterministic Policy Gradient (DDPG) algorithm designed for continuous state and action spaces.

Real World Applications
Robotic arms play a critical role in manufacturing, production facilities, space exploration and search and rescue operations. It is very important to control the robot arm with high precision and flexibility. By employing reinforcement learning techniques, these robotic systems can be enabled to learn and adjust their behavior in real time, thereby improving performance and flexibility. Advances in reinforcement learning not only contribute to our understanding of artificial intelligence, but have the potential to revolutionize industries and have a meaningful impact on society.
Reacher is a robotic arm simulator that is often used for the development and testing of control algorithms. It provides a virtual environment that simulates the physical characteristics and motion laws of the robotic arm, allowing developers to conduct research and experiments on control algorithms without the need for actual hardware.
Reacher's environment mainly consists of the following parts:
- Robotic arm: Reacher simulates a double-jointed robotic arm, including a fixed base and two movable joints. Developers can change the attitude and position of the robotic arm by controlling its two joints.
- Target point: Within the movement range of the robotic arm, Reacher provides a target point, and the position of the target point is randomly generated. The developer's task is to control the robotic arm so that the end of the robotic arm can contact the target point.
- Physics engine: Reacher uses a physics engine to simulate the physical characteristics and movement patterns of the robotic arm. Developers can simulate different physical environments by adjusting the parameters of the physics engine.
- Visual interface: Reacher provides a visual interface that can display the positions of the robotic arm and target points, as well as the posture and movement trajectory of the robotic arm. Developers can debug and optimize control algorithms through a visual interface.
Reacher simulator is a very practical tool that can help developers quickly test and optimize control algorithms without the need for actual hardware.
Simulation Environment
Reacher is built using the Unity ML-Agents toolkit, our agent can control a dual-jointed robotic arm. The goal is to guide the arm toward the target position and maintain its position within the target area for as long as possible. The environment features 20 synchronized agents, each running independently, which helps to efficiently collect experience during training.
State and Action Space
Understanding state and action space is crucial to designing effective reinforcement learning algorithms. In the Reacher environment, the state space consists of 33 continuous variables that provide information about the robotic arm, such as its position, rotation, velocity, and angular velocity. The action space is also continuous, with four variables corresponding to the torques exerted on the two joints of the robotic arm. Each action variable is a real number between -1 and 1.
Task Types and Success Criteria
Reacher tasks are considered to be fragmented, with each fragment containing a fixed number of time steps. The agent's goal is to maximize its total reward during these steps. The arm end effector receives a 0.1 bonus for each step it takes to maintain the target position. Success is considered when an agent achieves an average score of 30 points or above over 100 consecutive operations.
Now that we understand the environment, let's explore the DDPG algorithm, its implementation, and how it effectively solves continuous control problems in this environment.
Algorithm Selection for Continuous Control: DDPG
When it comes to continuous control tasks like the Reacher problem, algorithm selection is critical to achieving optimal performance. In this project, we chose the DDPG algorithm because it is an actor-critic method specifically designed to handle continuous state and action spaces.
The DDPG algorithm combines the advantages of policy-based and value-based methods by combining two neural networks: the actor network determines the best behavior given the current state, and the critic network network) estimates the state-behavior value function (Q-function). Both types of networks have target networks that stabilize the learning process by providing a fixed target during the update process.
By using the Critic network to estimate the q function and the Actor network to determine the optimal behavior, the DDPG algorithm effectively combines the advantages of the policy gradient method and DQN. This hybrid approach allows agents to learn efficiently in a continuous control environment.
<code>import random from collections import deque import torch import torch.nn as nn import numpy as np from actor_critic import Actor, Critic class ReplayBuffer: def __init__(self, buffer_size, batch_size): self.memory = deque(maxlen=buffer_size) self.batch_size = batch_size def add(self, state, action, reward, next_state, done): self.memory.append((state, action, reward, next_state, done)) def sample(self): batch = random.sample(self.memory, self.batch_size) states, actions, rewards, next_states, dones = zip(*batch) return states, actions, rewards, next_states, dones def __len__(self): return len(self.memory) class DDPG: def __init__(self, state_dim, action_dim, hidden_dim, buffer_size, batch_size, actor_lr, critic_lr, tau, gamma): self.actor = Actor(state_dim, hidden_dim, action_dim, actor_lr) self.actor_target = Actor(state_dim, hidden_dim, action_dim, actor_lr) self.critic = Critic(state_dim, action_dim, hidden_dim, critic_lr) self.critic_target = Critic(state_dim, action_dim, hidden_dim, critic_lr) self.memory = ReplayBuffer(buffer_size, batch_size) self.batch_size = batch_size self.tau = tau self.gamma = gamma self._update_target_networks(tau=1)# initialize target networks def act(self, state, noise=0.0): state = torch.tensor(state, dtype=torch.float32).unsqueeze(0) action = self.actor(state).detach().numpy()[0] return np.clip(action + noise, -1, 1) def store_transition(self, state, action, reward, next_state, done): self.memory.add(state, action, reward, next_state, done) def learn(self): if len(self.memory) </code>
The above code also uses Replay Buffer, which can improve learning efficiency and stability. Replay Buffer is essentially a memory data structure that stores a fixed number of past experiences or transitions, consisting of status, action, reward, next status and completion information. The main advantage of using it is to enable the agent to break correlations between consecutive experiences, thereby reducing the impact of harmful temporal correlations.
By drawing random mini-batches of experience from the buffer, the agent can learn from a diverse set of transformations, which helps stabilize and generalize the learning process. Replay Buffers also allow agents to reuse past experiences multiple times, thereby increasing data efficiency and promoting more effective learning from limited interactions with the environment.
The DDPG algorithm is a good choice because of its ability to efficiently handle continuous action spaces, which is a key aspect in this environment. The design of the algorithm allows efficient utilization of parallel experience gathered by multiple agents, resulting in faster learning and better convergence. Just like the Reacher introduced above, it can run 20 agents at the same time, so we can use these 20 agents to share experience, learn collectively, and increase the learning speed.
After completing the algorithm, we will introduce the hyperparameter selection and training process below.
DDPG algorithm works in the Reacher environment
To better understand the effectiveness of the algorithm in the environment, we need to take a closer look at the key components and steps involved in the learning process.
Network Architecture
The DDPG algorithm uses two neural networks, Actor and Critic. Both networks contain two hidden layers, each containing 400 nodes. The hidden layer uses the ReLU (Rectified Linear Unit) activation function, while the output layer of the Actor network uses the tanh activation function to generate actions ranging from -1 to 1. The output layer of the critic network has no activation function because it directly estimates the q function.
The following is the code of the network:
<code>import numpy as np import torch import torch.nn as nn import torch.optim as optim class Actor(nn.Module): def __init__(self, input_dim, hidden_dim, output_dim, learning_rate=1e-4): super(Actor, self).__init__() self.fc1 = nn.Linear(input_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, hidden_dim) self.fc3 = nn.Linear(hidden_dim, output_dim) self.tanh = nn.Tanh() self.optimizer = optim.Adam(self.parameters(), lr=learning_rate) def forward(self, state): x = torch.relu(self.fc1(state)) x = torch.relu(self.fc2(x)) x = self.tanh(self.fc3(x)) return x class Critic(nn.Module): def __init__(self, state_dim, action_dim, hidden_dim, learning_rate=1e-4): super(Critic, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim + action_dim, hidden_dim) self.fc3 = nn.Linear(hidden_dim, 1) self.optimizer = optim.Adam(self.parameters(), lr=learning_rate) def forward(self, state, action): x = torch.relu(self.fc1(state)) x = torch.relu(self.fc2(torch.cat([x, action], dim=1))) x = self.fc3(x) return x</code>
Hyperparameter selection
The selected hyperparameters are crucial for efficient learning. In this project, our Replay Buffer size is 200,000 and the batch size is 256. The learning rate of Actor is 5e-4, the learning rate of Critic is 1e-3, the soft update parameter (tau) is 5e-3, and gamma is 0.995. Finally, action noise was added, with an initial noise scale of 0.5 and a noise attenuation rate of 0.998.
Training process
The training process involves continuous interaction between the two networks, and with 20 parallel agents sharing the same network, the model learns collectively from the experience collected by all agents. This setup speeds up the learning process and increases efficiency.
<code>from collections import deque import numpy as np import torch from ddpg import DDPG def train_ddpg(env, agent, episodes, max_steps, num_agents, noise_scale=0.1, noise_decay=0.99): scores_window = deque(maxlen=100) scores = [] for episode in range(1, episodes + 1): env_info = env.reset(train_mode=True)[brain_name] states = env_info.vector_observations agent_scores = np.zeros(num_agents) for step in range(max_steps): actions = agent.act(states, noise_scale) env_info = env.step(actions)[brain_name] next_states = env_info.vector_observations rewards = env_info.rewards dones = env_info.local_done for i in range(num_agents): agent.store_transition(states[i], actions[i], rewards[i], next_states[i], dones[i]) agent.learn() states = next_states agent_scores += rewards noise_scale *= noise_decay if np.any(dones): break avg_score = np.mean(agent_scores) scores_window.append(avg_score) scores.append(avg_score) if episode % 10 == 0: print(f"Episode: {episode}, Score: {avg_score:.2f}, Avg Score: {np.mean(scores_window):.2f}") # Saving trained Networks torch.save(agent.actor.state_dict(), "actor_final.pth") torch.save(agent.critic.state_dict(), "critic_final.pth") return scores if __name__ == "__main__": env = UnityEnvironment(file_name='Reacher_20.app') brain_name = env.brain_names[0] brain = env.brains[brain_name] state_dim = 33 action_dim = brain.vector_action_space_size num_agents = 20 # Hyperparameter suggestions hidden_dim = 400 batch_size = 256 actor_lr = 5e-4 critic_lr = 1e-3 tau = 5e-3 gamma = 0.995 noise_scale = 0.5 noise_decay = 0.998 agent = DDPG(state_dim, action_dim, hidden_dim=hidden_dim, buffer_size=200000, batch_size=batch_size,actor_lr=actor_lr, critic_lr=critic_lr, tau=tau, gamma=gamma) episodes = 200 max_steps = 1000 scores = train_ddpg(env, agent, episodes, max_steps, num_agents, noise_scale=0.2, noise_decay=0.995)</code>The key steps in the training process are as follows:
Initialize the network: The agent initializes the shared Actor and Critic networks and their respective target networks with random weights. The target network provides stable learning targets during updates.
- Interacting with the environment: Each agent uses a shared Actor network to interact with the environment by selecting actions based on its current state. To encourage exploration, a noise term is also added to the actions in the initial stages of training. After taking an action, each agent observes the resulting reward and next state.
- Storing experience: Each agent stores the observed experience (state, action, reward, next_state) in the shared replay buffer. This buffer contains a fixed amount of recent experience so that each agent can learn from various transitions collected by all agents.
- Learn from experience: Periodically extract a batch of experiences from the shared replay buffer. Use sampling experience to update the shared critic network by minimizing the mean square error between the predicted Q-value and the target Q-value.
- Update Actor Network: The shared Actor network is updated using the policy gradient, which is calculated by taking the output gradient of the shared Critic network with respect to the selected action. The shared actor network learns to choose actions that maximize the expected Q-value.
- Update target network: The shared Actor and Critic target networks are soft updated using a mixture of current and target network weights. This ensures a stable learning process.
Result Display
Our agent successfully learned to control a double-jointed robotic arm in the Racher environment using the DDPG algorithm. Throughout the training process, we monitor the agent's performance based on the average score of all 20 agents. As the agent explores the environment and gathers experience, its ability to predict optimal behavior for reward maximization improves significantly.
It can be seen that the agent showed significant proficiency in the task, with the average score exceeding the threshold required to solve the environment (30), although the agent's performance varied throughout There are differences during the training process, but the overall trend is upward, indicating that the learning process is successful.
The graph below shows the average score of 20 agents:
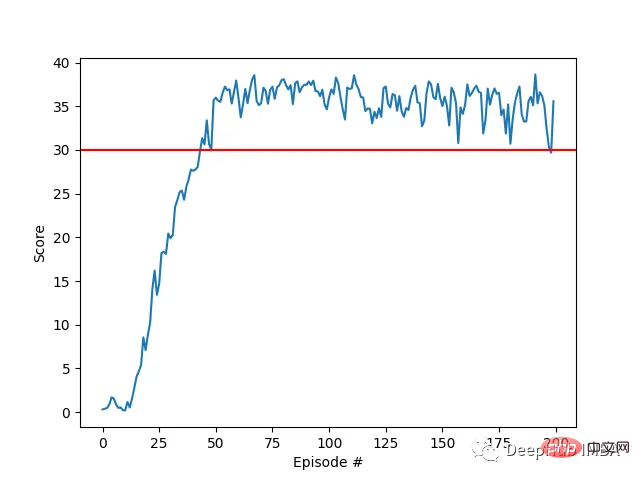
#You can see that the DDPG algorithm we implemented effectively solved the problem of the Racher environment. Agents are able to adjust their behavior and achieve expected performance in tasks.
Next steps
The hyperparameters in this project were selected based on a combination of recommendations from the literature and empirical testing. Further optimization through system hyperparameter tuning may lead to better performance.
Multi-agent parallel training: In this project, we use 20 agents to collect experience at the same time. The impact of using more agents on the overall learning process may result in faster convergence or improved performance.
Batch normalization: To further enhance the learning process, implementing batch normalization in neural network architectures is worth exploring. By normalizing the input features of each layer during training, batch normalization can help reduce internal covariate shifts, speed up learning, and potentially improve generalization. Adding batch normalization to the Actor and Critic networks may lead to more stable and efficient training, but this requires further testing.
The above is the detailed content of Controlling a double-jointed robotic arm using Actor-Critic's DDPG reinforcement learning algorithm. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1378
1378
 52
52

 Bytedance Cutting launches SVIP super membership: 499 yuan for continuous annual subscription, providing a variety of AI functions
Jun 28, 2024 am 03:51 AM
Bytedance Cutting launches SVIP super membership: 499 yuan for continuous annual subscription, providing a variety of AI functions
Jun 28, 2024 am 03:51 AM
This site reported on June 27 that Jianying is a video editing software developed by FaceMeng Technology, a subsidiary of ByteDance. It relies on the Douyin platform and basically produces short video content for users of the platform. It is compatible with iOS, Android, and Windows. , MacOS and other operating systems. Jianying officially announced the upgrade of its membership system and launched a new SVIP, which includes a variety of AI black technologies, such as intelligent translation, intelligent highlighting, intelligent packaging, digital human synthesis, etc. In terms of price, the monthly fee for clipping SVIP is 79 yuan, the annual fee is 599 yuan (note on this site: equivalent to 49.9 yuan per month), the continuous monthly subscription is 59 yuan per month, and the continuous annual subscription is 499 yuan per year (equivalent to 41.6 yuan per month) . In addition, the cut official also stated that in order to improve the user experience, those who have subscribed to the original VIP
 Context-augmented AI coding assistant using Rag and Sem-Rag
Jun 10, 2024 am 11:08 AM
Context-augmented AI coding assistant using Rag and Sem-Rag
Jun 10, 2024 am 11:08 AM
Improve developer productivity, efficiency, and accuracy by incorporating retrieval-enhanced generation and semantic memory into AI coding assistants. Translated from EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG, author JanakiramMSV. While basic AI programming assistants are naturally helpful, they often fail to provide the most relevant and correct code suggestions because they rely on a general understanding of the software language and the most common patterns of writing software. The code generated by these coding assistants is suitable for solving the problems they are responsible for solving, but often does not conform to the coding standards, conventions and styles of the individual teams. This often results in suggestions that need to be modified or refined in order for the code to be accepted into the application
 Can fine-tuning really allow LLM to learn new things: introducing new knowledge may make the model produce more hallucinations
Jun 11, 2024 pm 03:57 PM
Can fine-tuning really allow LLM to learn new things: introducing new knowledge may make the model produce more hallucinations
Jun 11, 2024 pm 03:57 PM
Large Language Models (LLMs) are trained on huge text databases, where they acquire large amounts of real-world knowledge. This knowledge is embedded into their parameters and can then be used when needed. The knowledge of these models is "reified" at the end of training. At the end of pre-training, the model actually stops learning. Align or fine-tune the model to learn how to leverage this knowledge and respond more naturally to user questions. But sometimes model knowledge is not enough, and although the model can access external content through RAG, it is considered beneficial to adapt the model to new domains through fine-tuning. This fine-tuning is performed using input from human annotators or other LLM creations, where the model encounters additional real-world knowledge and integrates it
 Seven Cool GenAI & LLM Technical Interview Questions
Jun 07, 2024 am 10:06 AM
Seven Cool GenAI & LLM Technical Interview Questions
Jun 07, 2024 am 10:06 AM
To learn more about AIGC, please visit: 51CTOAI.x Community https://www.51cto.com/aigc/Translator|Jingyan Reviewer|Chonglou is different from the traditional question bank that can be seen everywhere on the Internet. These questions It requires thinking outside the box. Large Language Models (LLMs) are increasingly important in the fields of data science, generative artificial intelligence (GenAI), and artificial intelligence. These complex algorithms enhance human skills and drive efficiency and innovation in many industries, becoming the key for companies to remain competitive. LLM has a wide range of applications. It can be used in fields such as natural language processing, text generation, speech recognition and recommendation systems. By learning from large amounts of data, LLM is able to generate text
 To provide a new scientific and complex question answering benchmark and evaluation system for large models, UNSW, Argonne, University of Chicago and other institutions jointly launched the SciQAG framework
Jul 25, 2024 am 06:42 AM
To provide a new scientific and complex question answering benchmark and evaluation system for large models, UNSW, Argonne, University of Chicago and other institutions jointly launched the SciQAG framework
Jul 25, 2024 am 06:42 AM
Editor |ScienceAI Question Answering (QA) data set plays a vital role in promoting natural language processing (NLP) research. High-quality QA data sets can not only be used to fine-tune models, but also effectively evaluate the capabilities of large language models (LLM), especially the ability to understand and reason about scientific knowledge. Although there are currently many scientific QA data sets covering medicine, chemistry, biology and other fields, these data sets still have some shortcomings. First, the data form is relatively simple, most of which are multiple-choice questions. They are easy to evaluate, but limit the model's answer selection range and cannot fully test the model's ability to answer scientific questions. In contrast, open-ended Q&A
 Five schools of machine learning you don't know about
Jun 05, 2024 pm 08:51 PM
Five schools of machine learning you don't know about
Jun 05, 2024 pm 08:51 PM
Machine learning is an important branch of artificial intelligence that gives computers the ability to learn from data and improve their capabilities without being explicitly programmed. Machine learning has a wide range of applications in various fields, from image recognition and natural language processing to recommendation systems and fraud detection, and it is changing the way we live. There are many different methods and theories in the field of machine learning, among which the five most influential methods are called the "Five Schools of Machine Learning". The five major schools are the symbolic school, the connectionist school, the evolutionary school, the Bayesian school and the analogy school. 1. Symbolism, also known as symbolism, emphasizes the use of symbols for logical reasoning and expression of knowledge. This school of thought believes that learning is a process of reverse deduction, through existing
 SOTA performance, Xiamen multi-modal protein-ligand affinity prediction AI method, combines molecular surface information for the first time
Jul 17, 2024 pm 06:37 PM
SOTA performance, Xiamen multi-modal protein-ligand affinity prediction AI method, combines molecular surface information for the first time
Jul 17, 2024 pm 06:37 PM
Editor | KX In the field of drug research and development, accurately and effectively predicting the binding affinity of proteins and ligands is crucial for drug screening and optimization. However, current studies do not take into account the important role of molecular surface information in protein-ligand interactions. Based on this, researchers from Xiamen University proposed a novel multi-modal feature extraction (MFE) framework, which for the first time combines information on protein surface, 3D structure and sequence, and uses a cross-attention mechanism to compare different modalities. feature alignment. Experimental results demonstrate that this method achieves state-of-the-art performance in predicting protein-ligand binding affinities. Furthermore, ablation studies demonstrate the effectiveness and necessity of protein surface information and multimodal feature alignment within this framework. Related research begins with "S
 SK Hynix will display new AI-related products on August 6: 12-layer HBM3E, 321-high NAND, etc.
Aug 01, 2024 pm 09:40 PM
SK Hynix will display new AI-related products on August 6: 12-layer HBM3E, 321-high NAND, etc.
Aug 01, 2024 pm 09:40 PM
According to news from this site on August 1, SK Hynix released a blog post today (August 1), announcing that it will attend the Global Semiconductor Memory Summit FMS2024 to be held in Santa Clara, California, USA from August 6 to 8, showcasing many new technologies. generation product. Introduction to the Future Memory and Storage Summit (FutureMemoryandStorage), formerly the Flash Memory Summit (FlashMemorySummit) mainly for NAND suppliers, in the context of increasing attention to artificial intelligence technology, this year was renamed the Future Memory and Storage Summit (FutureMemoryandStorage) to invite DRAM and storage vendors and many more players. New product SK hynix launched last year
