
 Backend Development
PHP Tutorial
How to develop autonomous driving and Internet of Vehicles in PHP?
Backend Development
PHP Tutorial
How to develop autonomous driving and Internet of Vehicles in PHP?
How to develop autonomous driving and Internet of Vehicles in PHP?

As a popular web development language, PHP can help us build efficient and scalable autonomous driving and Internet of Vehicles applications. Autonomous driving technology is becoming more and more widely used, and the Internet of Vehicles has become a new trend in the automotive industry. Therefore, it is very important to understand how to use PHP for autonomous driving and Internet of Vehicles development.
Automatic driving technology
Automatic driving technology means that the car can drive autonomously without the driver's intervention. In autonomous driving technology, vehicles use a variety of sensors (such as radar, cameras, lidar, etc.) to collect environmental information, and use advanced algorithms to solve problems such as avoiding collisions, slowing down and changing lanes, and driving direction. Here, PHP can help us build web applications that support autonomous driving functions, including some basic functions, such as:
- Data Management
Autonomous Driving Technology Conference A large amount of data is generated, including sensor data, vehicle operation data, traffic information, etc. Managing this data is so important that it is at the heart of many autonomous driving applications.
- Communication and collaboration
Autonomous vehicles must be able to interoperate with other vehicles and infrastructure to exchange information, coordinate actions, etc. in different road conditions. PHP can help us build communication systems for different sensors and devices, and assist vehicle collaboration to achieve automated operations.
- Integration and Testing
In autonomous driving technology, hardware and software must work well together to achieve autonomous driving. PHP can help us test software and integrated hardware, and develop some simulator-based testing tools.
Internet of Vehicles Technology
Internet of Vehicles technology refers to a network composed of smart cars and connected vehicles, which can connect vehicles, humans and infrastructure and form an interactive system. Therefore, in the development of Internet of Vehicles, PHP can help us build applications in the following aspects:
- INTELLIGENT CONTROL
Internet of Vehicles technology can help vehicles intelligently control own driving, such as automatic navigation, automatic parking, automatic emergency braking, etc. PHP can help us build web applications that communicate with the Internet of Vehicles so that vehicles can safely perform these operations.
- Traffic Information
Internet of Vehicles technology can collect and analyze driving conditions, such as traffic flow, vehicle speed, road construction, etc., to help drivers better plan driving routes. PHP can help us build Internet of Vehicles applications to predict and analyze traffic flows and provide driving recommendations.
- Car Sharing
Internet of Vehicles technology can be shared between different vehicles to reduce the use and emissions of a single vehicle. PHP can help us develop web applications for car sharing, allowing car owners to manage car sharing plans and delivery services online.
- Driving Behavior Monitoring
Internet of Vehicles applications can collect drivers’ driving data and use advanced algorithms to analyze this data to guide drivers to drive safely. PHP can help us build and manage applications that communicate with the Internet of Vehicles to monitor driver behavior and vehicle operations to ensure that all vehicles are driven safely.
Summary
In this article, we learned how to use PHP to implement autonomous driving and car networking technology. PHP is a popular web programming language that helps us build efficient and scalable applications. Autonomous driving technology and Internet of Vehicles technology are new trends in the automotive industry. Learning how to use PHP to develop applications for these technologies has great potential for future development.
The above is the detailed content of How to develop autonomous driving and Internet of Vehicles in PHP?. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1386
1386
 52
52

 PHP format rows to CSV and write file pointer
Mar 22, 2024 am 09:00 AM
PHP format rows to CSV and write file pointer
Mar 22, 2024 am 09:00 AM
This article will explain in detail how PHP formats rows into CSV and writes file pointers. I think it is quite practical, so I share it with you as a reference. I hope you can gain something after reading this article. Format rows to CSV and write to file pointer Step 1: Open file pointer $file=fopen("path/to/file.csv","w"); Step 2: Convert rows to CSV string using fputcsv( ) function converts rows to CSV strings. The function accepts the following parameters: $file: file pointer $fields: CSV fields as an array $delimiter: field delimiter (optional) $enclosure: field quotes (
 How to solve the long tail problem in autonomous driving scenarios?
Jun 02, 2024 pm 02:44 PM
How to solve the long tail problem in autonomous driving scenarios?
Jun 02, 2024 pm 02:44 PM
Yesterday during the interview, I was asked whether I had done any long-tail related questions, so I thought I would give a brief summary. The long-tail problem of autonomous driving refers to edge cases in autonomous vehicles, that is, possible scenarios with a low probability of occurrence. The perceived long-tail problem is one of the main reasons currently limiting the operational design domain of single-vehicle intelligent autonomous vehicles. The underlying architecture and most technical issues of autonomous driving have been solved, and the remaining 5% of long-tail problems have gradually become the key to restricting the development of autonomous driving. These problems include a variety of fragmented scenarios, extreme situations, and unpredictable human behavior. The "long tail" of edge scenarios in autonomous driving refers to edge cases in autonomous vehicles (AVs). Edge cases are possible scenarios with a low probability of occurrence. these rare events
 PHP changes current umask
Mar 22, 2024 am 08:41 AM
PHP changes current umask
Mar 22, 2024 am 08:41 AM
This article will explain in detail about changing the current umask in PHP. The editor thinks it is quite practical, so I share it with you as a reference. I hope you can gain something after reading this article. Overview of PHP changing current umask umask is a php function used to set the default file permissions for newly created files and directories. It accepts one argument, which is an octal number representing the permission to block. For example, to prevent write permission on newly created files, you would use 002. Methods of changing umask There are two ways to change the current umask in PHP: Using the umask() function: The umask() function directly changes the current umask. Its syntax is: intumas
 PHP creates a file with a unique file name
Mar 21, 2024 am 11:22 AM
PHP creates a file with a unique file name
Mar 21, 2024 am 11:22 AM
This article will explain in detail how to create a file with a unique file name in PHP. The editor thinks it is quite practical, so I share it with you as a reference. I hope you can gain something after reading this article. Creating files with unique file names in PHP Introduction Creating files with unique file names in PHP is essential for organizing and managing your file system. Unique file names ensure that existing files are not overwritten and make it easier to find and retrieve specific files. This guide will cover several ways to generate unique filenames in PHP. Method 1: Use the uniqid() function The uniqid() function generates a unique string based on the current time and microseconds. This string can be used as the basis for the file name.
 Let's talk about end-to-end and next-generation autonomous driving systems, as well as some misunderstandings about end-to-end autonomous driving?
Apr 15, 2024 pm 04:13 PM
Let's talk about end-to-end and next-generation autonomous driving systems, as well as some misunderstandings about end-to-end autonomous driving?
Apr 15, 2024 pm 04:13 PM
In the past month, due to some well-known reasons, I have had very intensive exchanges with various teachers and classmates in the industry. An inevitable topic in the exchange is naturally end-to-end and the popular Tesla FSDV12. I would like to take this opportunity to sort out some of my thoughts and opinions at this moment for your reference and discussion. How to define an end-to-end autonomous driving system, and what problems should be expected to be solved end-to-end? According to the most traditional definition, an end-to-end system refers to a system that inputs raw information from sensors and directly outputs variables of concern to the task. For example, in image recognition, CNN can be called end-to-end compared to the traditional feature extractor + classifier method. In autonomous driving tasks, input data from various sensors (camera/LiDAR
 nuScenes' latest SOTA | SparseAD: Sparse query helps efficient end-to-end autonomous driving!
Apr 17, 2024 pm 06:22 PM
nuScenes' latest SOTA | SparseAD: Sparse query helps efficient end-to-end autonomous driving!
Apr 17, 2024 pm 06:22 PM
Written in front & starting point The end-to-end paradigm uses a unified framework to achieve multi-tasking in autonomous driving systems. Despite the simplicity and clarity of this paradigm, the performance of end-to-end autonomous driving methods on subtasks still lags far behind single-task methods. At the same time, the dense bird's-eye view (BEV) features widely used in previous end-to-end methods make it difficult to scale to more modalities or tasks. A sparse search-centric end-to-end autonomous driving paradigm (SparseAD) is proposed here, in which sparse search fully represents the entire driving scenario, including space, time, and tasks, without any dense BEV representation. Specifically, a unified sparse architecture is designed for task awareness including detection, tracking, and online mapping. In addition, heavy
 FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
Target detection is a relatively mature problem in autonomous driving systems, among which pedestrian detection is one of the earliest algorithms to be deployed. Very comprehensive research has been carried out in most papers. However, distance perception using fisheye cameras for surround view is relatively less studied. Due to large radial distortion, standard bounding box representation is difficult to implement in fisheye cameras. To alleviate the above description, we explore extended bounding box, ellipse, and general polygon designs into polar/angular representations and define an instance segmentation mIOU metric to analyze these representations. The proposed model fisheyeDetNet with polygonal shape outperforms other models and simultaneously achieves 49.5% mAP on the Valeo fisheye camera dataset for autonomous driving
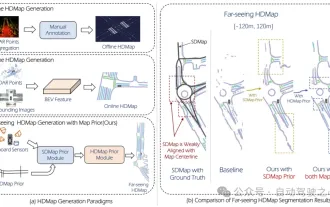 Mass production killer! P-Mapnet: Using the low-precision map SDMap prior, the mapping performance is violently improved by nearly 20 points!
Mar 28, 2024 pm 02:36 PM
Mass production killer! P-Mapnet: Using the low-precision map SDMap prior, the mapping performance is violently improved by nearly 20 points!
Mar 28, 2024 pm 02:36 PM
As written above, one of the algorithms used by current autonomous driving systems to get rid of dependence on high-precision maps is to take advantage of the fact that the perception performance in long-distance ranges is still poor. To this end, we propose P-MapNet, where the “P” focuses on fusing map priors to improve model performance. Specifically, we exploit the prior information in SDMap and HDMap: on the one hand, we extract weakly aligned SDMap data from OpenStreetMap and encode it into independent terms to support the input. There is a problem of weak alignment between the strictly modified input and the actual HD+Map. Our structure based on the Cross-attention mechanism can adaptively focus on the SDMap skeleton and bring significant performance improvements;
