
 Technology peripherals
AI
A spelunking artifact? Single-rotor self-rotating drone with autonomous navigation, more efficient!
Technology peripherals
AI
A spelunking artifact? Single-rotor self-rotating drone with autonomous navigation, more efficient!
A spelunking artifact? Single-rotor self-rotating drone with autonomous navigation, more efficient!

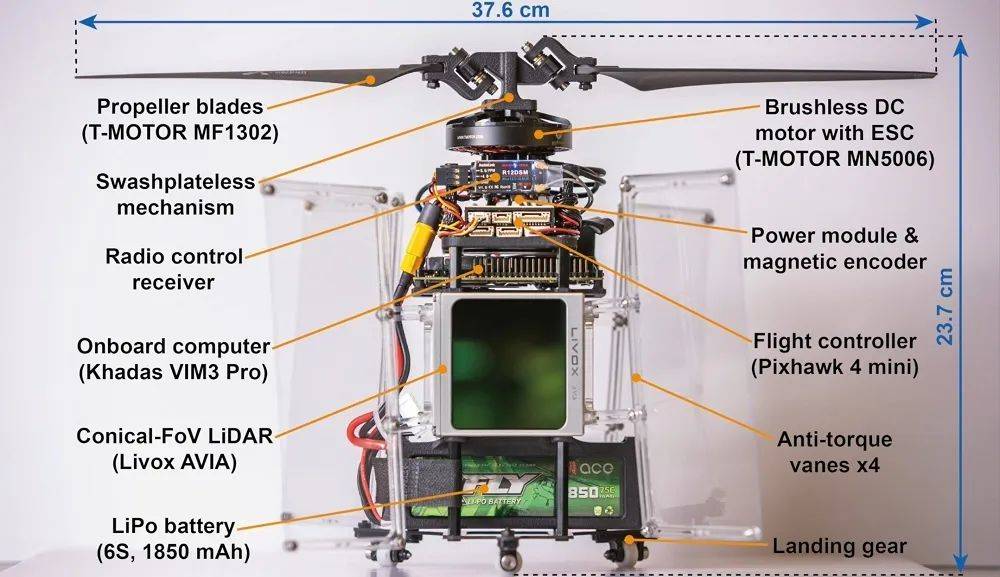
Structure diagram of PULSAR
[Global Network Drone Comprehensive Report] News from the University of Hong Kong, recently, a team led by Dr. Zhang Fu, Assistant Professor of the Department of Mechanical Engineering, School of Engineering, The University of Hong Kong (HKU), has recently designed a powered flight without the need for a driver. The radar-sensing drone is called PULSAR. "Pulsars" have multiple functions such as sensing and mapping, just like the scene in the science fiction movie "Prometheus" where humans use spin detectors to build a three-dimensional map of a cave in real time, becoming a reality.
According to reports, the importance of drones is gradually increasing in many fields such as search and rescue, cave exploration, and architectural mapping. Dr. Zhang's team focuses on spin motion. "Pulsars" use powered flight and do not need to drive radar sensing. Because of their spin motion and the scanning mode of the lidar beam, they are intuitively similar to pulsars in astronomy. Named after being very similar. "Pulsar" is equipped with a micro-onboard computer and lidar, enabling completely autonomous perception, mapping, planning and control, without the need for external equipment assistance in either indoor or outdoor environments. A single actuator is used on the pulsar to drive a swashplate-less mechanism that can produce thrust and torque simultaneously.
Dr. Zhang’s team used “Pulsar” to conduct experiments in environmental exploration and multi-directional dynamic obstacle avoidance. The results showed that it can perform autonomous navigation in unknown environments without relying on any external device assistance and Detect static and dynamic obstacles in the environment in real time.
"Pulsar" has the ability to conduct fully automatic navigation at night, indicating that its navigation performance is not limited by light conditions. Additionally, it can handle external wind disturbances. Even if it is disturbed by a maximum wind speed of 4.5 meters per second, the "Pulsar" can still maintain a hovering position within a small range. These features make the aircraft safer and more stable in the wild environment.
The sensor can also increase the field of view through intrinsic spin movement, thereby improving the drone's perception capabilities and mission efficiency, in addition to the above capabilities. There are currently two main methods used to expand the field of view of the sensor, and their common feature is high overall power consumption. One possible approach is to use sensors with a large field of view, such as fisheye lenses, reflective cameras, or 360-degree lidar. However, fisheye cameras and self-reflective cameras often suffer from significant deformation, and the field of view of 360-degree lidar in the vertical direction is still narrow and the resolution is low. Another method is to use multiple sensors simultaneously, such as a multi-camera system or a multi-lidar system. However, multi-sensor systems will bring additional costs and longer data processing time. Similarly, using a gimbal system to expand the field of view will also bring similar problems.
Dr. Zhang’s team found that “Pulsar” can save 26.7% of energy consumption while maintaining good flexibility compared with a quadcopter drone with the same blade area and load. The pulsar's power system uses a single actuator to achieve higher energy conversion efficiency, with an overall efficiency of up to 6.65 grams per watt. With only a propeller with a diameter of only 37.6 cm and a small battery with a capacity of 41 watt hours, this 1234-gram drone achieved a hover time of more than 12 minutes. If the lidar is replaced with larger propellers and batteries, the hover time of the "Pulsar" can be extended to more than 40 minutes.
The research results have been published in Science Robotics. The article is titled "A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation" and was published in Science Website home page picture.
Dr. Zhang said that the research platform established by his team is conducive to more in-depth research on spinning drones. “We believe that the establishment of this platform will be conducive to exploring the control methods of drones under high-speed rotation and the control of drones under violent motion.” Localization and mapping (SLAM) technology."
The above is the detailed content of A spelunking artifact? Single-rotor self-rotating drone with autonomous navigation, more efficient!. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1369
1369
 52
52

 2024 DJI drone rankings: Each model has sales of 50,000+, which one have you used?
Dec 16, 2023 pm 05:33 PM
2024 DJI drone rankings: Each model has sales of 50,000+, which one have you used?
Dec 16, 2023 pm 05:33 PM
Hello, hello! I am Yuan Haha, please pay attention, more exciting content is waiting for you. With the continuous advancement of drone technology, we can now buy one of the most important and reliable 4K cameras within a budget of several thousand yuan. This is how many times Unimaginable years ago. With the continuous efforts of DJI, Autel and other companies, this dream has become a reality. The overall drone of choice is DJI Mavic 3 Pro. This drone not only provides ultra-high definition recording, but also has excellent frame rates and long-lasting battery. life. In addition to my personal experience, I’ve compiled some other top drones for you to choose from based on positive reviews around the web. Now, let’s take a look at these exciting options. Best Drone Overall: DJIMavic 3Pr
 Drone swarms: A game-changing technology for defense applications
Nov 14, 2023 pm 08:53 PM
Drone swarms: A game-changing technology for defense applications
Nov 14, 2023 pm 08:53 PM
Abstract: Swarming is a disruptive, game-changing technology that involves the collaborative deployment of multiple unmanned systems in multiple domains (land, sea, air, space). Developments in new microelectronics, guidance, navigation, sensors and artificial intelligence technologies enable low-cost micro-drones to perform challenging missions. When combined with novel decision-making processes, target tracking, communications technologies and algorithms, swarms can have a huge impact on the battlefield. It can also be used to provide continuous and undetectable surveillance capabilities as well as critical defense capabilities, such as intercepting cruise missiles. This article describes European research activities in the field of swarming and delves into the significant implications it may have for defence. Keywords: UAV, autonomous capability, target tracking,
 The largest domestically produced unmanned transport aircraft successfully made its maiden flight: equipped with China Aviation Engineering Group's AEP100-A engine
Aug 23, 2024 am 07:32 AM
The largest domestically produced unmanned transport aircraft successfully made its maiden flight: equipped with China Aviation Engineering Group's AEP100-A engine
Aug 23, 2024 am 07:32 AM
According to news from this website on August 22, China Aviation Engine Group Co., Ltd. issued an official announcement today. At 6:28 today, the 900-kilowatt turboprop engine AEP100-A, which was completely independently developed by China Aviation Industry Corporation, powered the SA750U large unmanned transport aircraft in Shaanxi. Successful first flight. According to reports, the AEP100-A turboprop engine was designed by the China Aerospace Engineering Research Institute and manufactured in the South. It has the ability to adapt to high temperatures and plateaus. It uses three-dimensional aerodynamic design and unit design technology to provide power for aircraft while improving fuel economy. Improve overall aircraft operating efficiency. The AEP100 turboprop engine series can be equipped with 2 to 6 ton general-purpose aircraft or 3 to 10 ton unmanned aerial vehicles, and its comprehensive performance has reached the international advanced level of the same level currently in service. This site reported earlier
 Domestic Wing Loong series drones: writing a new chapter in multi-field applications, covering many fields such as meteorology, emergency, and security
Dec 01, 2023 pm 05:47 PM
Domestic Wing Loong series drones: writing a new chapter in multi-field applications, covering many fields such as meteorology, emergency, and security
Dec 01, 2023 pm 05:47 PM
According to Science and Technology Daily, on November 28, at the AVIC UAV site in Zigong, Sichuan, the Aviation Industry Corporation of China held an open day event with the theme of "The Winged Dragon of a Great Power Travels the World" to comprehensively display domestically produced large-scale drones. Development achievements in high-end drone development and industrial construction. After more than ten years of development, the domestically produced "Pterosaur" series of UAV products independently developed by AVIC UAV have formed a pedigree. The Wing Loong-2 appeared at the state-owned enterprise's open day and performed a flight demonstration. The Wing Loong-2 is a medium-high altitude, long-endurance multi-purpose UAV system developed by the aviation industry. It has all-day, all-weather, all-territory, and multi-scenario mission execution capabilities. This UAV system is my country's first domestically produced large-scale turboprop-powered UAV system. It has advanced aerodynamic layout, body structure,
 my country's first large-scale unmanned transport aircraft with a load exceeding 3 tons, the 'SA750U', successfully made its maiden flight, with nationally produced systems and materials
Aug 23, 2024 am 07:31 AM
my country's first large-scale unmanned transport aircraft with a load exceeding 3 tons, the 'SA750U', successfully made its maiden flight, with nationally produced systems and materials
Aug 23, 2024 am 07:31 AM
According to news from this site on August 22, according to the official public account of "Shanhe Huayu", at 6:28 today, the SA750U large unmanned transport aircraft independently developed by Sunward Huayu Aviation Technology and completed by the strategic coordination of Sunward Star Airlines flew from Jingbian, Xi'an. The experimental drone test center successfully made its first flight. ▲Picture source "Shanhe Huayu" official public account, the same as below. According to reports, during the 40-minute flight test, all system equipment of the aircraft worked normally and were in good condition. The attitude of the aircraft was stable and the performance met the design specifications. After completing the scheduled flight subjects Afterwards, the plane returned smoothly and the first flight was a complete success. The SA750U is my country's first large-scale unmanned transport aircraft with a load of over 3 tons. It only took Shanhe Huayu Company 2 years and 8 months to complete the entire process from concept design to the successful first flight of the first aircraft.
 The Wing Loong UAV takes to the skies again and becomes an aerial base station in Gansu
Dec 21, 2023 am 08:13 AM
The Wing Loong UAV takes to the skies again and becomes an aerial base station in Gansu
Dec 21, 2023 am 08:13 AM
The Wing Loong-2H drone once again went to Jishishan County, Gansu Province to perform disaster relief tasks such as disaster reconnaissance and emergency communication support. This type of drone is called an "air base station" and can continuously restore public network signal networks of China Mobile, China Unicom, and Telecom, directionally restore 50 square kilometers of public network communications, and establish an audio and video communication network covering 15,000 square kilometers. The Wing Loong-2H performed well in the 2021 heavy rain disaster rescue in Zhengzhou, Henan, and the 2022 Luding earthquake rescue in Sichuan, successfully completing the mission. Original source: CCTV Military Weibo
 Panasonic will mass-produce all-solid-state batteries for drones, claiming to charge 80% in 3 minutes
Sep 21, 2023 pm 08:21 PM
Panasonic will mass-produce all-solid-state batteries for drones, claiming to charge 80% in 3 minutes
Sep 21, 2023 pm 08:21 PM
Panasonic Holdings announced on September 12 that it plans to start mass production of small all-solid-state batteries currently being developed for applications such as drones in the second half of the 2020s (that is, 2025 to 2029). According to the Nikkei Shimbun, Panasonic Holdings said that if it can be put into practical use, it is expected to be able to charge 80% of the drone battery capacity in about 3 minutes. Compared with existing lithium-ion batteries that take about an hour to charge, convenience will be greatly improved. Panasonic Holdings disclosed its technology demonstration to the media and customer companies for the first time and introduced all-solid-state batteries. Although details such as the composition of the metal material have not been announced, officials say it is expected to be able to charge and discharge tens of thousands of times, which will far exceed the approximately 3,000 times of charge and discharge of ordinary lithium-ion batteries. All-solid-state batteries as a new generation of vehicle battery backup
 Real-time issues in UAV image processing
Oct 08, 2023 pm 04:33 PM
Real-time issues in UAV image processing
Oct 08, 2023 pm 04:33 PM
Real-time issues in UAV image processing require specific code examples. With the continuous development of UAV technology, UAV application fields are becoming more and more extensive. Image processing plays an important role in drone vision applications. However, UAVs face some challenges in real-time image processing, especially when processing large-scale image data. This article will explore how to solve real-time problems in UAV image processing and provide some specific code examples. First, drones face latency issues in image transmission. Because drones usually use wireless
