
 Technology peripherals
AI
Addressing the Challenges of Mobile Robot Software Automation Testing
Technology peripherals
AI
Addressing the Challenges of Mobile Robot Software Automation Testing
Addressing the Challenges of Mobile Robot Software Automation Testing

We'll explore the complexities of automating mobile home robots and focus on the unique challenges during setup to overcome limitations to ensure users have a smooth start

In a previous article, I explained how to use April Tag technology to automate home robots. A huge challenge when it comes to automating home robots or other robots is the setup of the device. In the world of devices, phones, and mobile apps, devices are typically connected to the host device via USB, and the device is always connected to a power source. However, for testing robots, a unique challenge arises, namely how to conduct testing while the robot is moving. Because it cannot be connected to the host device through a physical wired connection. So, how should we verify the unboxing experience? Don’t worry, I will explain this in this article
Complexity and Challenges
After I gave you a brief introduction to the various challenges of setup phase in Robot Automation Testing, let me go deeper Researching More Challenges
The robot is moving and cannot have a physical wired connection to the host device. It may be possible for some component level testing, but not for end-to-end (E2E) testing
The out-of-box experience is when the device is not connected to WiFi. How does the host device interact with the device when it is brand new? This is a very common situation in daily robot testing
When any error or exception occurs in the robot, recovery operations are required. The main goal of automated testing is to discover potential software and hardware problems with the robot. If we encounter a problem, how should we report and recover the device?
The robot's battery is about to run out and we need a reliable power source to charge the robot
It is very important to extend the same setup to multiple lab and home environments. This is because we can't just sign or test the bot in one environment. Let's address these issues in chronological order. It can be rewritten as: Let's solve these problems in chronological order
Using the Raspberry Pi Default Robot
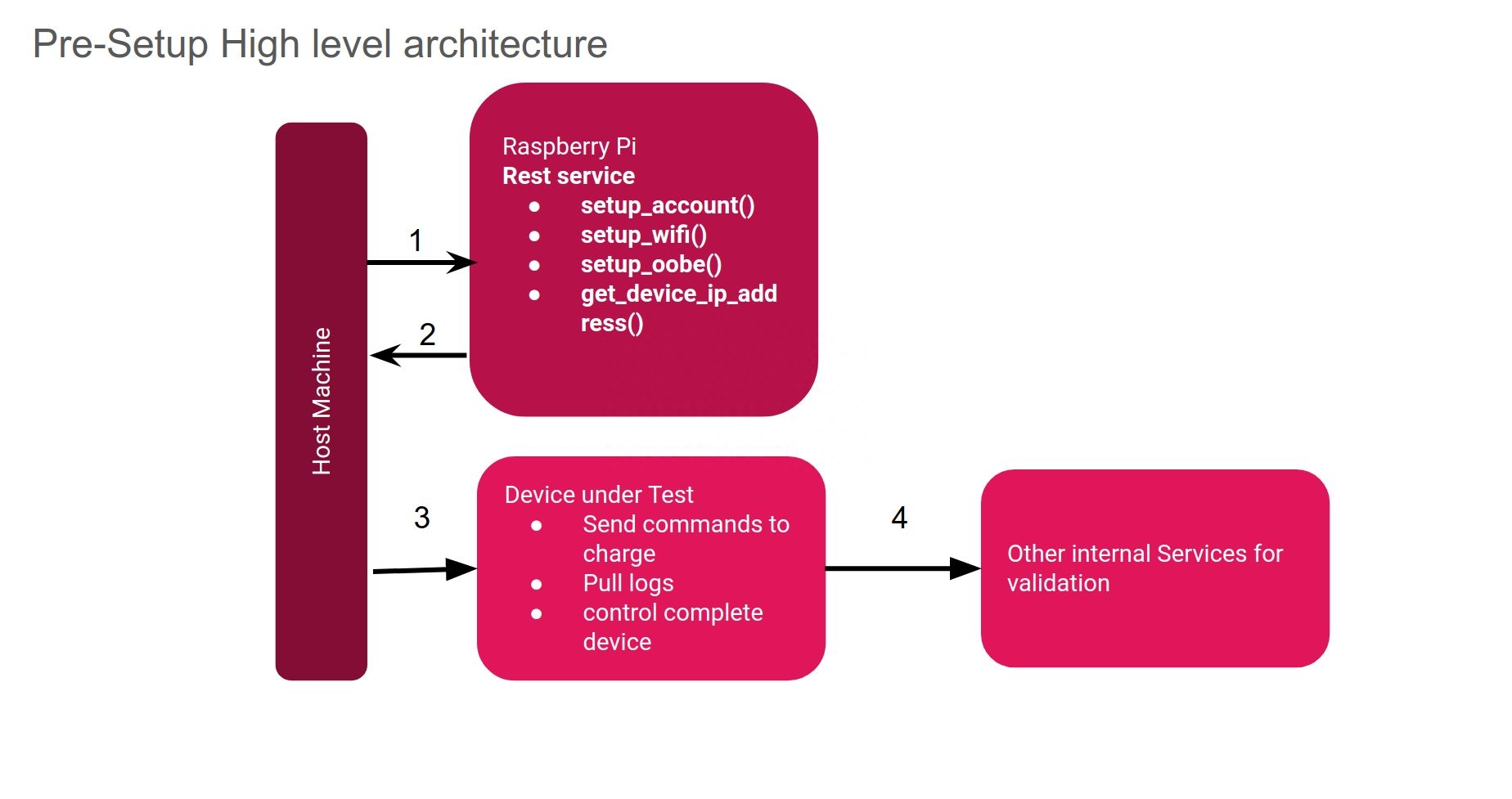
The important thing is to solve this problem. Consider the case of a robot located in a test automation laboratory. There is a host device connected to the company's internal network that is used to send and receive commands and access various source code, internal tools, and infrastructure. We will connect a Raspberry Pi to the device and run a REST service on the Raspberry Pi to communicate with the host device and the device. Below is an illustration showing this setup
Using Raspberry Pi Preset Robot
 Solving the Out of the Box Experience Use Case
Solving the Out of the Box Experience Use Case
Now , let’s take a look at how to pre-set the test environment through the Raspberry Pi. Next, we will explore how to solve the problem of the device not being able to connect to Wifi when out of the box
What is the role of RESTful services on the Raspberry Pi? What endpoints should a RESTful service contain?
Flash device- Complete OOBE
- Set up wifi, etc.
- Get DUT IP address
- Now, It became very easy for us to connect the device via wireless and the device was fully prepared for our testing
Recover the robot in case of any errors or exceptions
This is a Very common situation. Don't be overwhelmed or frustrated by these types of questions. At this point, we must use the device's low-level components to drive the device back to its original location. For example, as I mentioned in my previous article with various software stacks, we need access to the platform or mobility layer to drive the robot back to its original position. This is the trickiest and most challenging thing to do, so use other technology like April Tag or other external systems to drive the device back. This brings me to my next question, which is to put the device back on the charging dock in preparation for the next test run
Expand to multiple test environments
When placing the device back on the charging dock, use low Commands can improve reliability. Lower failure rate and higher efficiency than using top-level movement or navigation commands and platform or mobility layer drivers
Extended setup tips for multiple test environments:
Keep the setup simple. Don’t overcomplicate or over-engineer the solution.- Have deployable Raspberry Pi images so that any new Raspberry Pi can be easily loaded.
- Place the test code in the remote repository. Moving them on-premises won't scale.
- Robotic automation is not a simple matter and ultimately requires a lot of design work and consideration of other options on the market. There is no one solution that fits all situations. Before adopting the final solution, I recommend conducting a proof of concept
Alternatives
Given the nature and complexity of the problems we face, a common question is whether there are alternatives. In short, the answer is yes. We can effectively test by using emulators/emulators to cover most of the use cases we describe, but there is no substitute for real device testing
The above is the detailed content of Addressing the Challenges of Mobile Robot Software Automation Testing. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1386
1386
 52
52

 What do you think of furmark? - How is furmark considered qualified?
Mar 19, 2024 am 09:25 AM
What do you think of furmark? - How is furmark considered qualified?
Mar 19, 2024 am 09:25 AM
What do you think of furmark? 1. Set the "Run Mode" and "Display Mode" in the main interface, and also adjust the "Test Mode" and click the "Start" button. 2. After waiting for a while, you will see the test results, including various parameters of the graphics card. How is furmark qualified? 1. Use a furmark baking machine and check the results for about half an hour. It basically hovers around 85 degrees, with a peak value of 87 degrees and room temperature of 19 degrees. Large chassis, 5 chassis fan ports, two on the front, two on the top, and one on the rear, but only one fan is installed. All accessories are not overclocked. 2. Under normal circumstances, the normal temperature of the graphics card should be between "30-85℃". 3. Even in summer when the ambient temperature is too high, the normal temperature is "50-85℃
 The second generation Ameca is here! He can communicate with the audience fluently, his facial expressions are more realistic, and he can speak dozens of languages.
Mar 04, 2024 am 09:10 AM
The second generation Ameca is here! He can communicate with the audience fluently, his facial expressions are more realistic, and he can speak dozens of languages.
Mar 04, 2024 am 09:10 AM
The humanoid robot Ameca has been upgraded to the second generation! Recently, at the World Mobile Communications Conference MWC2024, the world's most advanced robot Ameca appeared again. Around the venue, Ameca attracted a large number of spectators. With the blessing of GPT-4, Ameca can respond to various problems in real time. "Let's have a dance." When asked if she had emotions, Ameca responded with a series of facial expressions that looked very lifelike. Just a few days ago, EngineeredArts, the British robotics company behind Ameca, just demonstrated the team’s latest development results. In the video, the robot Ameca has visual capabilities and can see and describe the entire room and specific objects. The most amazing thing is that she can also
 How can AI make robots more autonomous and adaptable?
Jun 03, 2024 pm 07:18 PM
How can AI make robots more autonomous and adaptable?
Jun 03, 2024 pm 07:18 PM
In the field of industrial automation technology, there are two recent hot spots that are difficult to ignore: artificial intelligence (AI) and Nvidia. Don’t change the meaning of the original content, fine-tune the content, rewrite the content, don’t continue: “Not only that, the two are closely related, because Nvidia is expanding beyond just its original graphics processing units (GPUs). The technology extends to the field of digital twins and is closely connected to emerging AI technologies. "Recently, NVIDIA has reached cooperation with many industrial companies, including leading industrial automation companies such as Aveva, Rockwell Automation, Siemens and Schneider Electric, as well as Teradyne Robotics and its MiR and Universal Robots companies. Recently,Nvidiahascoll
 After 2 months, the humanoid robot Walker S can fold clothes
Apr 03, 2024 am 08:01 AM
After 2 months, the humanoid robot Walker S can fold clothes
Apr 03, 2024 am 08:01 AM
Editor of Machine Power Report: Wu Xin The domestic version of the humanoid robot + large model team completed the operation task of complex flexible materials such as folding clothes for the first time. With the unveiling of Figure01, which integrates OpenAI's multi-modal large model, the related progress of domestic peers has been attracting attention. Just yesterday, UBTECH, China's "number one humanoid robot stock", released the first demo of the humanoid robot WalkerS that is deeply integrated with Baidu Wenxin's large model, showing some interesting new features. Now, WalkerS, blessed by Baidu Wenxin’s large model capabilities, looks like this. Like Figure01, WalkerS does not move around, but stands behind a desk to complete a series of tasks. It can follow human commands and fold clothes
 The first robot to autonomously complete human tasks appears, with five fingers that are flexible and fast, and large models support virtual space training
Mar 11, 2024 pm 12:10 PM
The first robot to autonomously complete human tasks appears, with five fingers that are flexible and fast, and large models support virtual space training
Mar 11, 2024 pm 12:10 PM
This week, FigureAI, a robotics company invested by OpenAI, Microsoft, Bezos, and Nvidia, announced that it has received nearly $700 million in financing and plans to develop a humanoid robot that can walk independently within the next year. And Tesla’s Optimus Prime has repeatedly received good news. No one doubts that this year will be the year when humanoid robots explode. SanctuaryAI, a Canadian-based robotics company, recently released a new humanoid robot, Phoenix. Officials claim that it can complete many tasks autonomously at the same speed as humans. Pheonix, the world's first robot that can autonomously complete tasks at human speeds, can gently grab, move and elegantly place each object to its left and right sides. It can autonomously identify objects
 The humanoid robot can do magic, let the Spring Festival Gala program team find out more
Feb 04, 2024 am 09:03 AM
The humanoid robot can do magic, let the Spring Festival Gala program team find out more
Feb 04, 2024 am 09:03 AM
In the blink of an eye, robots have learned to do magic? It was seen that it first picked up the water spoon on the table and proved to the audience that there was nothing in it... Then it put the egg-like object in its hand, then put the water spoon back on the table and started to "cast a spell"... …Just when it picked up the water spoon again, a miracle happened. The egg that was originally put in disappeared, and the thing that jumped out turned into a basketball... Let’s look at the continuous actions again: △ This animation shows a set of actions at 2x speed, and it flows smoothly. Only by watching the video repeatedly at 0.5x speed can it be understood. Finally, I discovered the clues: if my hand speed were faster, I might be able to hide it from the enemy. Some netizens lamented that the robot’s magic skills were even higher than their own: Mag was the one who performed this magic for us.
 Cloud Whale Xiaoyao 001 sweeping and mopping robot has a 'brain'! | Experience
Apr 26, 2024 pm 04:22 PM
Cloud Whale Xiaoyao 001 sweeping and mopping robot has a 'brain'! | Experience
Apr 26, 2024 pm 04:22 PM
Sweeping and mopping robots are one of the most popular smart home appliances among consumers in recent years. The convenience of operation it brings, or even the need for no operation, allows lazy people to free their hands, allowing consumers to "liberate" from daily housework and spend more time on the things they like. Improved quality of life in disguised form. Riding on this craze, almost all home appliance brands on the market are making their own sweeping and mopping robots, making the entire sweeping and mopping robot market very lively. However, the rapid expansion of the market will inevitably bring about a hidden danger: many manufacturers will use the tactics of sea of machines to quickly occupy more market share, resulting in many new products without any upgrade points. It is also said that they are "matryoshka" models. Not an exaggeration. However, not all sweeping and mopping robots are
 Ten humanoid robots shaping the future
Mar 22, 2024 pm 08:51 PM
Ten humanoid robots shaping the future
Mar 22, 2024 pm 08:51 PM
The following 10 humanoid robots are shaping our future: 1. ASIMO: Developed by Honda, ASIMO is one of the most well-known humanoid robots. Standing 4 feet tall and weighing 119 pounds, ASIMO is equipped with advanced sensors and artificial intelligence capabilities that allow it to navigate complex environments and interact with humans. ASIMO's versatility makes it suitable for a variety of tasks, from assisting people with disabilities to delivering presentations at events. 2. Pepper: Created by Softbank Robotics, Pepper aims to be a social companion for humans. With its expressive face and ability to recognize emotions, Pepper can participate in conversations, help in retail settings, and even provide educational support. Pepper's
