
 Technology peripherals
AI
Rewritten title: Byte launches Vi-PRoM visual pre-training program to improve robot operation success rate and effect
Technology peripherals
AI
Rewritten title: Byte launches Vi-PRoM visual pre-training program to improve robot operation success rate and effect
Rewritten title: Byte launches Vi-PRoM visual pre-training program to improve robot operation success rate and effect

In recent years, visual pre-training on large-scale real-world data has made significant progress, showing great potential in robot learning based on pixel observations. However, these studies differ in terms of pre-training data, methods, and models. Therefore, which type of data, pre-training methods and models can better assist robot control is still an open question
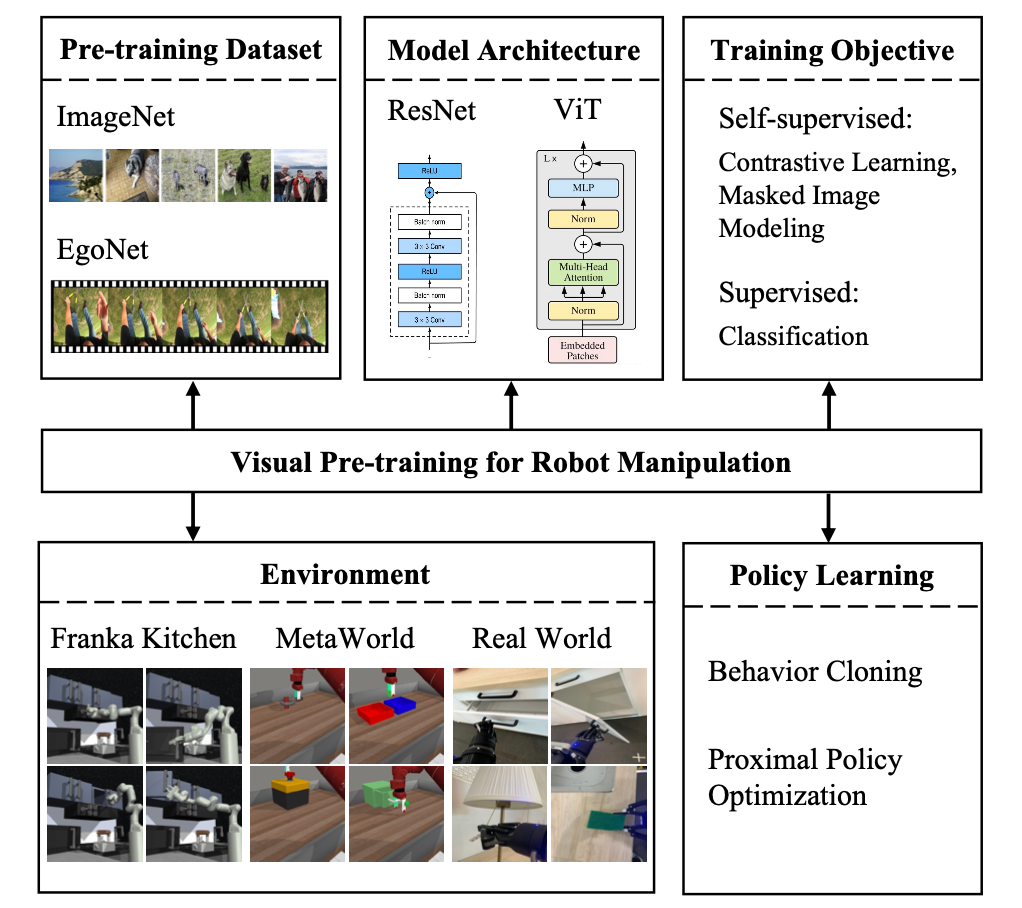
Based on this, researchers from the ByteDance Research team started fromThree basic perspectives of pre-training data set, model architecture and training method Comprehensively studied the impact of visual pre-training strategies on robot operation tasks, and provided some important experimental results that are beneficial to robot learning. In addition, they proposed a vision pre-training scheme for robot operation called Vi-PRoM, which combines self-supervised learning and supervised learning. The former uses contrastive learning to obtain latent patterns from large-scale unlabeled data, while the latter aims to learn visual semantics and temporal dynamic changes. A large number of robot operation experiments conducted in various simulation environments and real robots have proven the superiority of this solution.
- ##Paper address: https://arxiv.org/pdf/2308.03620.pdf
- Project address: https://explore-pretrain-robot.github.io/
Benchmark Research
##Pre-training data
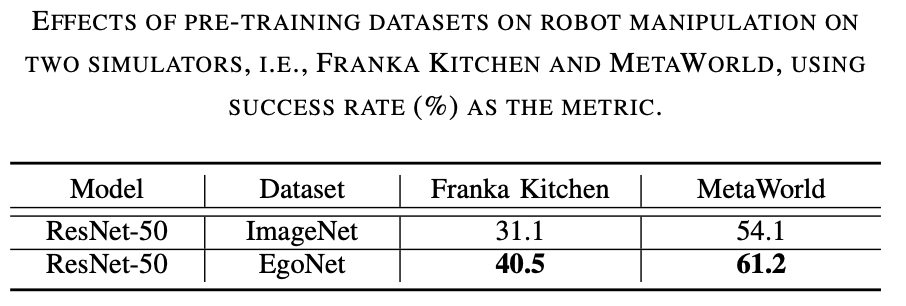
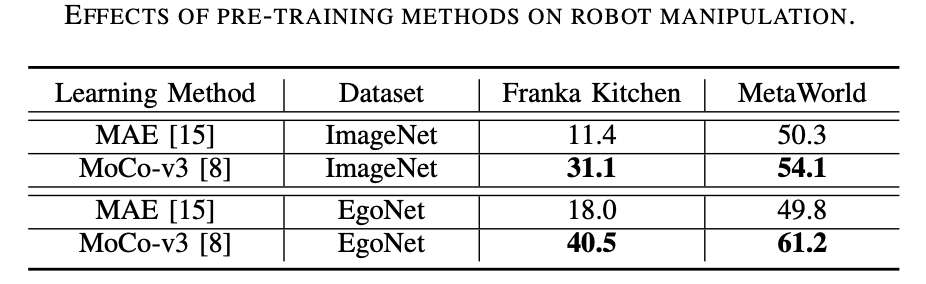
EgoNet is more powerful than ImageNet. Pretrain visual encoders on different datasets (i.e., ImageNet and EgoNet) through contrastive learning methods and observe their performance in robot manipulation tasks. As can be seen from Table 1 below, the model pre-trained on EgoNet achieved better performance on robot operation tasks. Obviously, robots prefer the interactive knowledge and temporal relationships contained in videos in terms of operating tasks. In addition, the egocentric natural images in EgoNet have more global context about the world, which means that richer visual features can be learned
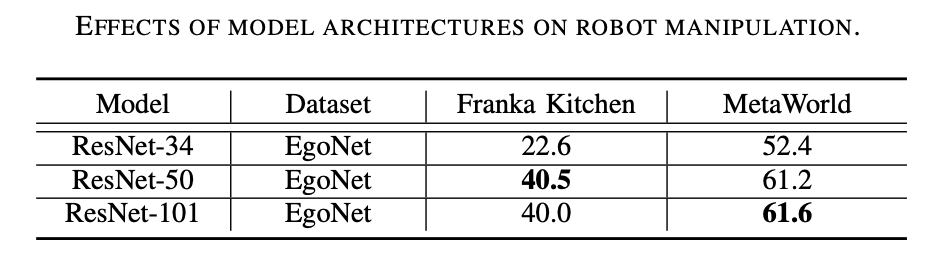
ResNet-50 performs better. As can be seen from Table 2 below, ResNet-50 and ResNet-101 perform better than ResNet-34 on robot manipulation tasks. Furthermore, the performance does not improve as the model increases from ResNet-50 to ResNet-101.
Needs to be rewritten according to the meaning of the original text The content is: "Contrastive learning is preferred for pre-training methods. As shown in Table 3 below, MoCo-v3 outperforms MAE on both ImageNet and EgoNet datasets, which proves that contrastive learning is more effective compared to mask image modeling. In addition , the visual semantics obtained through contrastive learning are more important for robot operation than the structural information learned through mask image modeling." Rewritten content: Contrastive learning is the preferred pre-training method. As can be seen from Table 3, MoCo-v3 outperforms MAE on both ImageNet and EgoNet datasets, indicating that contrastive learning is more effective than mask image modeling. In addition, the visual semantics obtained by contrastive learning are more important for robot operation than the structural information learned by mask image modeling
 Algorithm Introduction
Algorithm Introduction
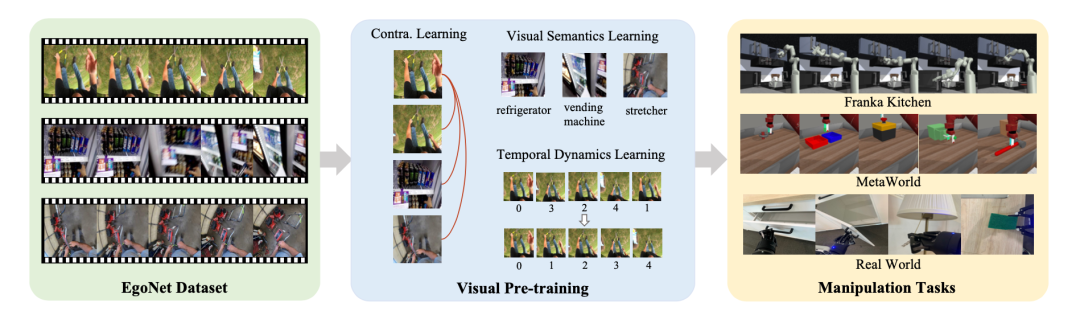
Based on the above exploration, this research proposes a visual pre-training solution for robot operation (Vi-PRoM). This solution extracts a comprehensive visual representation of robot operations by pre-training ResNet-50 on the EgoNet dataset. Specifically, we first use contrastive learning to obtain the interaction patterns between people and objects from the EgoNet data set through self-supervision. Then, two additional learning objectives, namely visual semantic prediction and temporal dynamic prediction, are proposed to further enrich the encoder's representation. The figure below shows the basic process of Vi-PRoM. Notably, this study does not require manual labeling to learn visual semantics and temporal dynamics
Experimental results
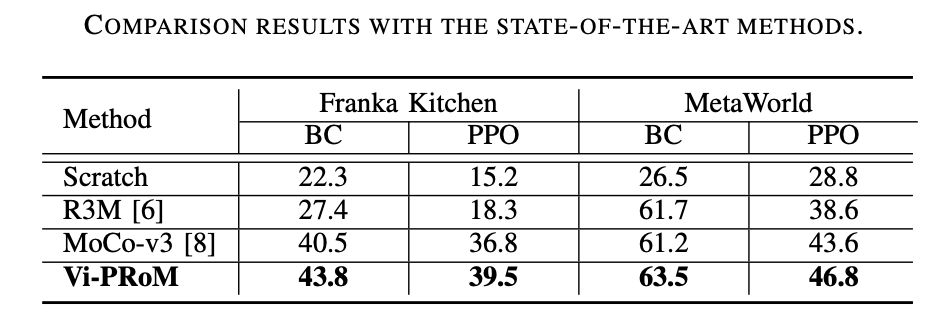
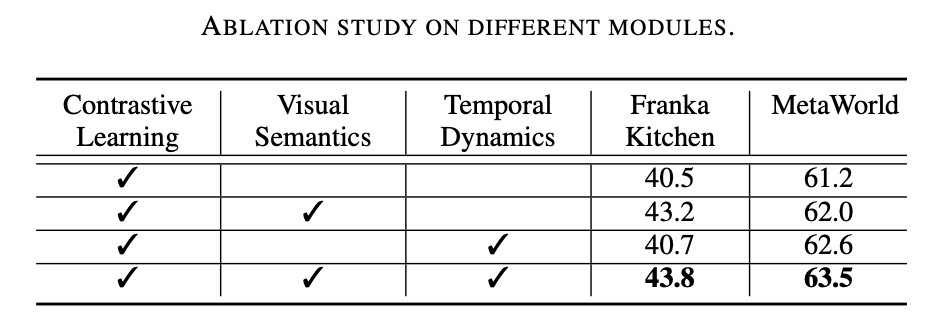
This research work conducted extensive experiments on two simulation environments (Franka Kitchen and MetaWorld). Experimental results show that the proposed pre-training scheme outperforms previous state-of-the-art methods in robot operation. The results of the ablation experiment are shown in the table below, which can prove the importance of visual semantic learning and temporal dynamic learning for robot operation. Furthermore, when both learning targets are absent, the success rate of Vi-PRoM drops significantly, demonstrating the effectiveness of the collaboration between visual semantic learning and temporal dynamic learning.
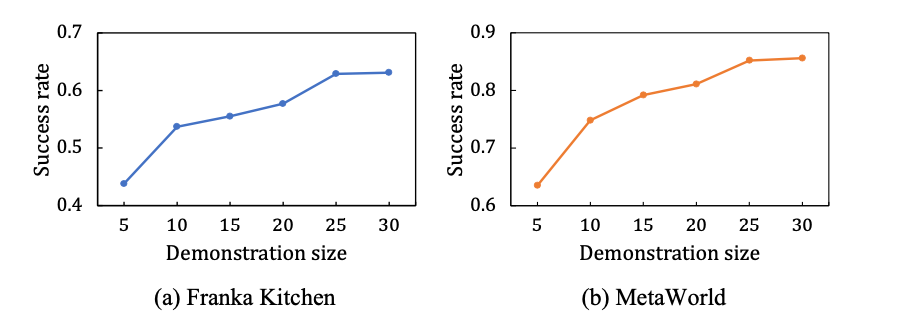
This work also investigates the scalability of Vi-PRoM. As shown in the figure below on the left, in the Franka Kitchen and MetaWorld simulation environments, the success rate of Vi-PRoM steadily improves as the size of the demo data increases. After training on a larger expert demonstration dataset, the Vi-PRoM model shows its scalability on robot manipulation tasks.

# Due to Vi-PRoM’s powerful visual representation capabilities, real The robot can successfully open drawers and cabinet doors
The experimental results on Franka Kitchen show that Vi-PRoM has a higher success rate and is more efficient than R3M in five tasks. High degree of action completion.
R3M:
 ##On MetaWorld, due to Vi- PRoM's visual representation learns good semantic and dynamic features, which can be better used for action prediction, so compared to R3M, Vi-PRoM requires fewer steps to complete the operation.
##On MetaWorld, due to Vi- PRoM's visual representation learns good semantic and dynamic features, which can be better used for action prediction, so compared to R3M, Vi-PRoM requires fewer steps to complete the operation.
R3M:

#Vi-PRoM:


The above is the detailed content of Rewritten title: Byte launches Vi-PRoM visual pre-training program to improve robot operation success rate and effect. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1384
1384
 52
52

 Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
0.What does this article do? We propose DepthFM: a versatile and fast state-of-the-art generative monocular depth estimation model. In addition to traditional depth estimation tasks, DepthFM also demonstrates state-of-the-art capabilities in downstream tasks such as depth inpainting. DepthFM is efficient and can synthesize depth maps within a few inference steps. Let’s read about this work together ~ 1. Paper information title: DepthFM: FastMonocularDepthEstimationwithFlowMatching Author: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Imagine an artificial intelligence model that not only has the ability to surpass traditional computing, but also achieves more efficient performance at a lower cost. This is not science fiction, DeepSeek-V2[1], the world’s most powerful open source MoE model is here. DeepSeek-V2 is a powerful mixture of experts (MoE) language model with the characteristics of economical training and efficient inference. It consists of 236B parameters, 21B of which are used to activate each marker. Compared with DeepSeek67B, DeepSeek-V2 has stronger performance, while saving 42.5% of training costs, reducing KV cache by 93.3%, and increasing the maximum generation throughput to 5.76 times. DeepSeek is a company exploring general artificial intelligence
 AI subverts mathematical research! Fields Medal winner and Chinese-American mathematician led 11 top-ranked papers | Liked by Terence Tao
Apr 09, 2024 am 11:52 AM
AI subverts mathematical research! Fields Medal winner and Chinese-American mathematician led 11 top-ranked papers | Liked by Terence Tao
Apr 09, 2024 am 11:52 AM
AI is indeed changing mathematics. Recently, Tao Zhexuan, who has been paying close attention to this issue, forwarded the latest issue of "Bulletin of the American Mathematical Society" (Bulletin of the American Mathematical Society). Focusing on the topic "Will machines change mathematics?", many mathematicians expressed their opinions. The whole process was full of sparks, hardcore and exciting. The author has a strong lineup, including Fields Medal winner Akshay Venkatesh, Chinese mathematician Zheng Lejun, NYU computer scientist Ernest Davis and many other well-known scholars in the industry. The world of AI has changed dramatically. You know, many of these articles were submitted a year ago.
 Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas officially enters the era of electric robots! Yesterday, the hydraulic Atlas just "tearfully" withdrew from the stage of history. Today, Boston Dynamics announced that the electric Atlas is on the job. It seems that in the field of commercial humanoid robots, Boston Dynamics is determined to compete with Tesla. After the new video was released, it had already been viewed by more than one million people in just ten hours. The old people leave and new roles appear. This is a historical necessity. There is no doubt that this year is the explosive year of humanoid robots. Netizens commented: The advancement of robots has made this year's opening ceremony look like a human, and the degree of freedom is far greater than that of humans. But is this really not a horror movie? At the beginning of the video, Atlas is lying calmly on the ground, seemingly on his back. What follows is jaw-dropping
 KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
Earlier this month, researchers from MIT and other institutions proposed a very promising alternative to MLP - KAN. KAN outperforms MLP in terms of accuracy and interpretability. And it can outperform MLP running with a larger number of parameters with a very small number of parameters. For example, the authors stated that they used KAN to reproduce DeepMind's results with a smaller network and a higher degree of automation. Specifically, DeepMind's MLP has about 300,000 parameters, while KAN only has about 200 parameters. KAN has a strong mathematical foundation like MLP. MLP is based on the universal approximation theorem, while KAN is based on the Kolmogorov-Arnold representation theorem. As shown in the figure below, KAN has
 The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
I cry to death. The world is madly building big models. The data on the Internet is not enough. It is not enough at all. The training model looks like "The Hunger Games", and AI researchers around the world are worrying about how to feed these data voracious eaters. This problem is particularly prominent in multi-modal tasks. At a time when nothing could be done, a start-up team from the Department of Renmin University of China used its own new model to become the first in China to make "model-generated data feed itself" a reality. Moreover, it is a two-pronged approach on the understanding side and the generation side. Both sides can generate high-quality, multi-modal new data and provide data feedback to the model itself. What is a model? Awaker 1.0, a large multi-modal model that just appeared on the Zhongguancun Forum. Who is the team? Sophon engine. Founded by Gao Yizhao, a doctoral student at Renmin University’s Hillhouse School of Artificial Intelligence.
 Kuaishou version of Sora 'Ke Ling' is open for testing: generates over 120s video, understands physics better, and can accurately model complex movements
Jun 11, 2024 am 09:51 AM
Kuaishou version of Sora 'Ke Ling' is open for testing: generates over 120s video, understands physics better, and can accurately model complex movements
Jun 11, 2024 am 09:51 AM
What? Is Zootopia brought into reality by domestic AI? Exposed together with the video is a new large-scale domestic video generation model called "Keling". Sora uses a similar technical route and combines a number of self-developed technological innovations to produce videos that not only have large and reasonable movements, but also simulate the characteristics of the physical world and have strong conceptual combination capabilities and imagination. According to the data, Keling supports the generation of ultra-long videos of up to 2 minutes at 30fps, with resolutions up to 1080p, and supports multiple aspect ratios. Another important point is that Keling is not a demo or video result demonstration released by the laboratory, but a product-level application launched by Kuaishou, a leading player in the short video field. Moreover, the main focus is to be pragmatic, not to write blank checks, and to go online as soon as it is released. The large model of Ke Ling is already available in Kuaiying.
 Tesla robots work in factories, Musk: The degree of freedom of hands will reach 22 this year!
May 06, 2024 pm 04:13 PM
Tesla robots work in factories, Musk: The degree of freedom of hands will reach 22 this year!
May 06, 2024 pm 04:13 PM
The latest video of Tesla's robot Optimus is released, and it can already work in the factory. At normal speed, it sorts batteries (Tesla's 4680 batteries) like this: The official also released what it looks like at 20x speed - on a small "workstation", picking and picking and picking: This time it is released One of the highlights of the video is that Optimus completes this work in the factory, completely autonomously, without human intervention throughout the process. And from the perspective of Optimus, it can also pick up and place the crooked battery, focusing on automatic error correction: Regarding Optimus's hand, NVIDIA scientist Jim Fan gave a high evaluation: Optimus's hand is the world's five-fingered robot. One of the most dexterous. Its hands are not only tactile
