
 Technology peripherals
AI
Microsoft AR/VR patent proposes using angle and line features for multi-camera image alignment
Technology peripherals
AI
Microsoft AR/VR patent proposes using angle and line features for multi-camera image alignment
Microsoft AR/VR patent proposes using angle and line features for multi-camera image alignment

MR systems can use multiple cameras, but they need to align the images when rendering them. However, image alignment is a challenging problem. Therefore, in a patent application titled "Method for Image Alignment Using Corner and Line Features", Microsoft proposed a solution
Of course, the industry already has methods of using corner features for image alignment. However, identifying corners in an image and aligning the image based on the identified corners is a time-consuming and computationally intensive operation.
What Microsoft proposes is a more effective improvement technology that can achieve better feature matching. The invention mainly introduces a hybrid method that uses corner features and line features to perform visual alignment, and this solution results in fewer constraints required in the alignment process, thereby improving computational efficiency and feature matching.
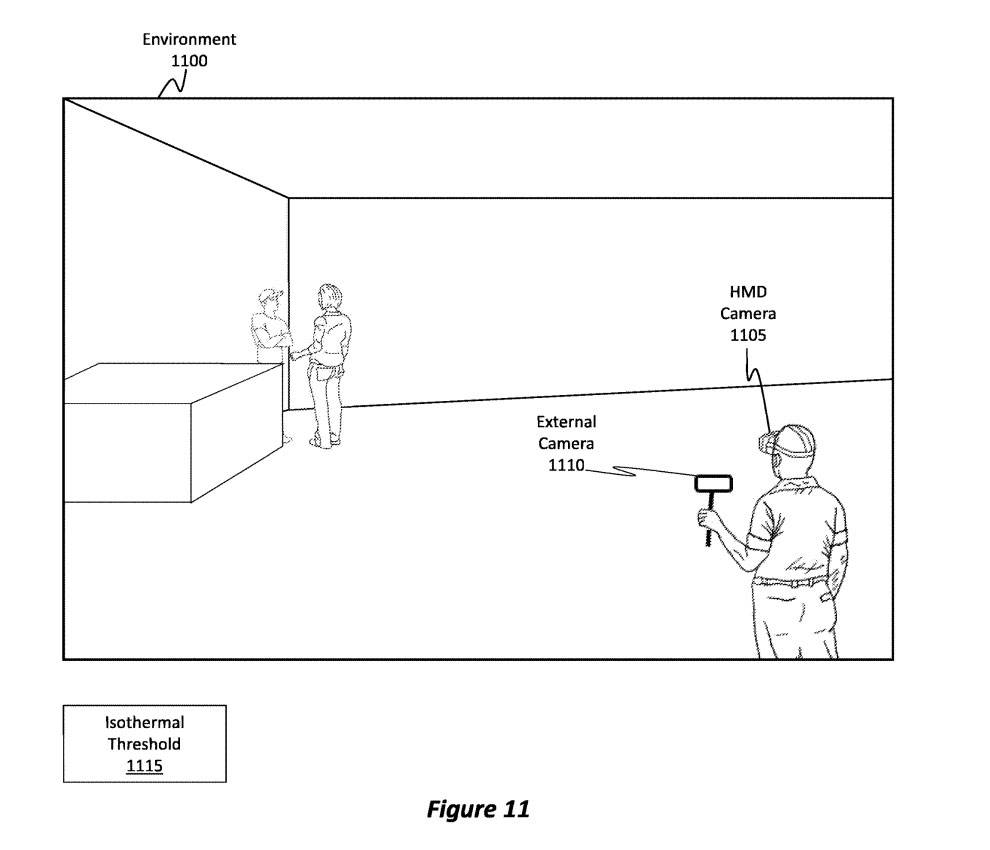
Figure 11 shows an example environment 1100 in which a user is using a head-mounted camera 1105 and an external camera 1110. As mentioned before, the image content generated from these two cameras needs to be aligned. But environment 1100 may be a low light environment, or it may be an environment that has low contrast in terms of thermal gradient or contrast.
For example, after the object cools down late at night, the temperature gradient of the environment may usually be uniform. In this case, the temperature profile or gradient of the environment may be below a specific isothermal threshold 1115 . In this case, traditional techniques for aligning content may fail. The embodiment described by Microsoft provides a solution for such scenarios.
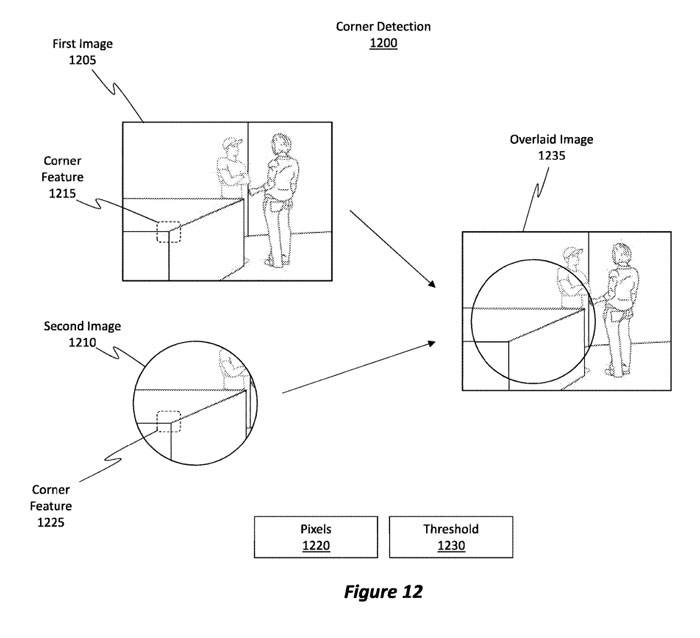
Figure 12 shows an example corner detection 1200 process that can be used to align images. Figure 12 shows a first image 1205 generated by the head-mounted camera 1105 of Figure 11, and a second image 1210 generated by the external camera 1110.
Perform corner detection operations to identify the "corners" present in the image. For example, embodiments may be used to identify corner features in the first image. In other words, a set of pixels can be identified in an image and determined to correspond to an angle.
"Corner" refers to one or more pixels of non-uniform intensity that has a first nearby block of pixels positioned horizontally relative to said one or more pixels and vertically positioned relative to said one or more pixels of the second nearby pixel block. In other words, a corner is defined as a set of one or more pixels that contrast with adjacent corners in the X and Y directions relative to the set of pixels.Identify the corner features 1215 in the first image 1205, and also identify the corner features in the second image 1210. Therefore, corner feature 1225 is successfully identified. It should be noted that angular feature 1225 and angular feature 1215 are corresponding
To align image content, this embodiment is tasked with identifying a threshold of 1230 corners. The threshold numbers of corners must correspond to each other. In other words, the multiple corners identified in the first image 1205 must be identified and must correspond to the multiple corners identified in the second image 1210
If these thresholds are met, embodiments may perform an image alignment operation to generate an overlay image 1235, an image in which content from the second image 1210 is aligned and then overlaid with corresponding content from the first image 1205 .
Performing corner detection and alignment is a computationally intensive operation, and if the match between the detected corners and the image is not good enough, the entire process may fail. For example, the method using only corner points requires identifying at least 5 corner points from one image and then matching them with the corresponding corner points in the second image. Under low contrast conditions, identifying even 5 corresponding corner points can be a challenge
After identifying a sufficient number of corners, embodiments then use the motion model to identify 3D rotations in order to adapt the image content from the first or second image by performing various rotations and transformations to align the 5 corners with each other. Another image. Performing such an alignment is computationally intensive.
Therefore, we need to reduce the constraints that exist when using only angular methods, and Figure 13 depicts such a technique.
Typically, it is easier to identify corresponding "lines" in an image than to identify corners, so the line detection process is usually faster than the corner detection process. Since the two processes can run in parallel and the line detection process is faster, adding the line detection process will not have a negative impact on the speed of the overall alignment process
By combining the use of lines to align images, fewer corners can be used during the alignment process, resulting in relaxed constraints and generally easier alignment. Especially in low temperature conditions, requiring the use of fewer corners is very beneficial because it is difficult to find and match corners
A "line" is defined as a set of one or more pixels that have a uniform intensity relative to a horizontally positioned first nearby pixel block of the set or sets of pixels, and have a uniform intensity relative to the set of one or more pixels. Uneven intensity of the vertically positioned second nearby pixel block of the pixel set. Alternatively, they have uneven intensity with respect to a horizontally positioned first nearby pixel block of one or more sets of pixels, and have uniform intensity with respect to a vertically positioned second nearby pixel block with respect to one or more sets of pixels.
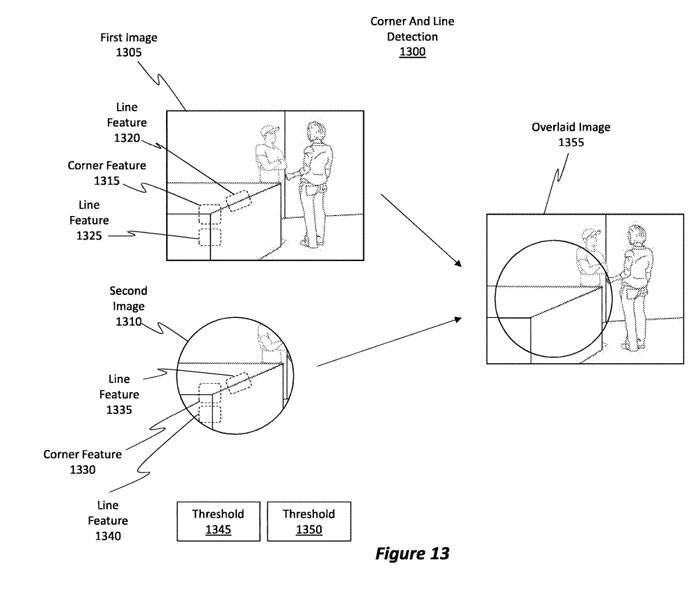
In Figure 13, a first image 1305 and a second image 1310 representative of the image in Figure 12 are shown. Figure 13 also shows an implementation method that can detect corner features 1315
in the first image 1305When detecting corner features on the first image 1305, line features are also detected at the same time, as shown in line features 1320 and 1325. Generally speaking, we can detect more lines
compared to the number of corners that can be detectedPerform angle and line operations on the second image 1310. For purposes of illustration, the embodiment identifies corner features 1330. In parallel with the corner detection operation, embodiments simultaneously detect lines in the second image 1310, such as line features 1335 and line features 1340.
Please note that corner feature 1330 corresponds to corner feature 1315; line feature 1335 corresponds to line feature 1320. Line feature 1340 corresponds to line feature 1325. Embodiments may identify these correspondences and then generate or use a motion model suitable for aligning these feature points with each other
According to the invention principle, we defined the first threshold as 1345. The first threshold refers to the number of corresponding angular features that must be identified in the two images in order to align them. At the same time, we also define a second threshold of 1350. The second threshold refers to the number of corresponding row features that must be identified in the two images in order for them to align
Satisfaction of first threshold 1345 and second threshold 1350 enables embodiments to align content from first image 1305 and second image 1310 to generate overlay image 1355. It is worth noting that the threshold usually refers to the total number of corners and lines that must be recognized.
After understanding the convenience and speed of performing line feature detection, you may question why embodiments only rely on line detection operations and avoid performing corner detection operations. The reason is because detecting lines in an image causes aperture issues.
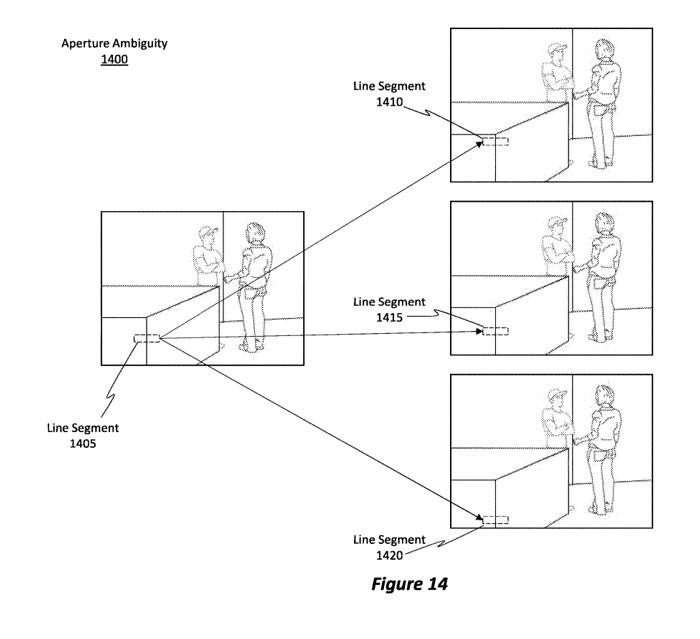
The following is the rewritten content: According to Figure 14, we can see the aperture problem, that is, the aperture ambiguity is 1400. In Figure 14, line segment 1405 is part of an entire line. Aperture ambiguity 1400 refers to the fact that multiple different parts of a line may (but incorrectly) relate to the identified line segment 1405
For example, line segment 1410 may be a block of pixels that matches line segment 1405, although line segment 1410 is actually in the wrong location or location. Similarly, line segment 1415 or line segment 1420 may contain blocks of pixels that may map or match pixels in line segment 1405. Such a scenario introduces ambiguity into the alignment process.
Therefore, relying on the line detection process itself is not enough technology. In other words, relying on combinations of lines and angles allows embodiments to use relaxed constraints, thereby improving computational efficiency.
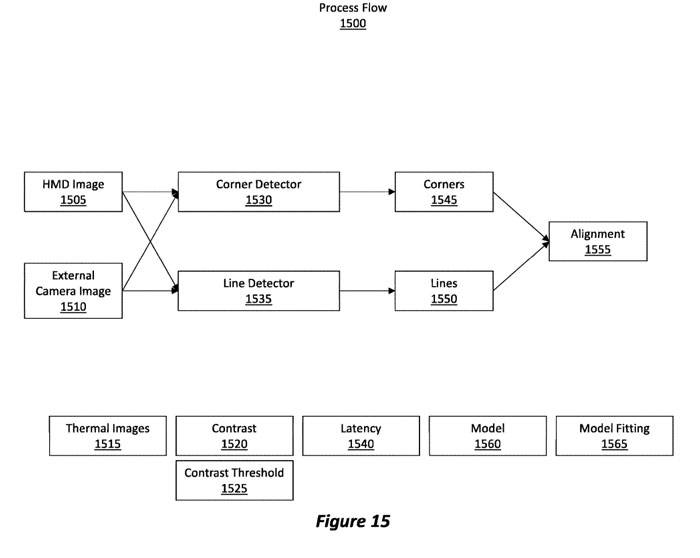
An example process flow 1500 is shown in Figure 15. Initially, a set of images is acquired, such as a head mounted camera image 1505 and an external camera image 1510. These images may be thermal images. The temperature gradient or contrast 1520 in the image may be below a certain contrast threshold 1525. Therefore, identifying a sufficient number of corners in an image can be quite difficult. In this case, a hybrid approach can be utilized to detect a combination of corners and lines to achieve alignment
Transmit the head-mounted camera image 1505 and the external camera image 1510 to the angle detector 1530 and the line detector 1535. These two detectors run simultaneously and have no dependency on each other
Please note that the line detector 1535 is generally faster at detecting lines than the corner detector 1530 at detecting angles. In other words, the delay time of the line detector 1535 is shorter than the delay time of the angle detector 1530
Corner detector 1530 analyzes the two images and identifies corner points 1545 in the images. Similarly, line detector 1535 analyzes the two images and identifies lines 1550 in the images. The embodiment then performs alignment 1555 by identifying corresponding corners and lines within the two images.
In order to perform alignment, a threshold number of lines and corners needs to be determined. The matching threshold is more relevant than the threshold for identifying the number of corners or lines. Embodiments then fit the identified corners and lines into a 3D model 1560 such as a motion model. Model fitting 1565 operations are then performed on the model 1560 to rotate, translate, and/or transform one image to match or align corresponding corners and lines in the other image.
In other words, when performing a reprojection operation, embodiments use identified corners and lines to align content from one image with content from another image
Related Patents: Microsoft Patent | Image alignment using corner and line features
The Microsoft patent application titled "Image alignment using corner and line features" was originally submitted in February 2022 and was recently published by the US Patent and Trademark Office.
The above is the detailed content of Microsoft AR/VR patent proposes using angle and line features for multi-camera image alignment. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1386
1386
 52
52

 Microsoft bing international version entrance address (bing search engine entrance)
Mar 14, 2024 pm 01:37 PM
Microsoft bing international version entrance address (bing search engine entrance)
Mar 14, 2024 pm 01:37 PM
Bing is an online search engine launched by Microsoft. The search function is very powerful and has two entrances: the domestic version and the international version. Where are the entrances to these two versions? How to access the international version? Let’s take a look at the details below. Bing Chinese version website entrance: https://cn.bing.com/ Bing international version website entrance: https://global.bing.com/ How to access Bing international version? 1. First enter the URL to open Bing: https://www.bing.com/ 2. You can see that there are options for domestic and international versions. We only need to select the international version and enter keywords.
 Microsoft releases Win11 August cumulative update: improving security, optimizing lock screen, etc.
Aug 14, 2024 am 10:39 AM
Microsoft releases Win11 August cumulative update: improving security, optimizing lock screen, etc.
Aug 14, 2024 am 10:39 AM
According to news from this site on August 14, during today’s August Patch Tuesday event day, Microsoft released cumulative updates for Windows 11 systems, including the KB5041585 update for 22H2 and 23H2, and the KB5041592 update for 21H2. After the above-mentioned equipment is installed with the August cumulative update, the version number changes attached to this site are as follows: After the installation of the 21H2 equipment, the version number increased to Build22000.314722H2. After the installation of the equipment, the version number increased to Build22621.403723H2. After the installation of the equipment, the version number increased to Build22631.4037. The main contents of the KB5041585 update for Windows 1121H2 are as follows: Improvement: Improved
 Microsoft Edge upgrade: Automatic password saving function banned? ! Users were shocked!
Apr 19, 2024 am 08:13 AM
Microsoft Edge upgrade: Automatic password saving function banned? ! Users were shocked!
Apr 19, 2024 am 08:13 AM
News on April 18th: Recently, some users of the Microsoft Edge browser using the Canary channel reported that after upgrading to the latest version, they found that the option to automatically save passwords was disabled. After investigation, it was found that this was a minor adjustment after the browser upgrade, rather than a cancellation of functionality. Before using the Edge browser to access a website, users reported that the browser would pop up a window asking if they wanted to save the login password for the website. After choosing to save, Edge will automatically fill in the saved account number and password the next time you log in, providing users with great convenience. But the latest update resembles a tweak, changing the default settings. Users need to choose to save the password and then manually turn on automatic filling of the saved account and password in the settings.
 Microsoft's full-screen pop-up urges Windows 10 users to hurry up and upgrade to Windows 11
Jun 06, 2024 am 11:35 AM
Microsoft's full-screen pop-up urges Windows 10 users to hurry up and upgrade to Windows 11
Jun 06, 2024 am 11:35 AM
According to news on June 3, Microsoft is actively sending full-screen notifications to all Windows 10 users to encourage them to upgrade to the Windows 11 operating system. This move involves devices whose hardware configurations do not support the new system. Since 2015, Windows 10 has occupied nearly 70% of the market share, firmly establishing its dominance as the Windows operating system. However, the market share far exceeds the 82% market share, and the market share far exceeds that of Windows 11, which will be released in 2021. Although Windows 11 has been launched for nearly three years, its market penetration is still slow. Microsoft has announced that it will terminate technical support for Windows 10 after October 14, 2025 in order to focus more on
 Microsoft Win11's function of compressing 7z and TAR files has been downgraded from 24H2 to 23H2/22H2 versions
Apr 28, 2024 am 09:19 AM
Microsoft Win11's function of compressing 7z and TAR files has been downgraded from 24H2 to 23H2/22H2 versions
Apr 28, 2024 am 09:19 AM
According to news from this site on April 27, Microsoft released the Windows 11 Build 26100 preview version update to the Canary and Dev channels earlier this month, which is expected to become a candidate RTM version of the Windows 1124H2 update. The main changes in the new version are the file explorer, Copilot integration, editing PNG file metadata, creating TAR and 7z compressed files, etc. @PhantomOfEarth discovered that Microsoft has devolved some functions of the 24H2 version (Germanium) to the 23H2/22H2 (Nickel) version, such as creating TAR and 7z compressed files. As shown in the diagram, Windows 11 will support native creation of TAR
 Microsoft Edge browser update: Added "zoom in image" function to improve user experience
Mar 21, 2024 pm 01:40 PM
Microsoft Edge browser update: Added "zoom in image" function to improve user experience
Mar 21, 2024 pm 01:40 PM
According to news on March 21, Microsoft recently updated its Microsoft Edge browser and added a practical "enlarge image" function. Now, when using the Edge browser, users can easily find this new feature in the pop-up menu by simply right-clicking on the image. What’s more convenient is that users can also hover the cursor over the image and then double-click the Ctrl key to quickly invoke the function of zooming in on the image. According to the editor's understanding, the newly released Microsoft Edge browser has been tested for new features in the Canary channel. The stable version of the browser has also officially launched the practical "enlarge image" function, providing users with a more convenient image browsing experience. Foreign science and technology media also paid attention to this
 Microsoft Z1000 SSD appears online, equipped with mysterious CNEXLabs controller
Mar 11, 2024 pm 01:50 PM
Microsoft Z1000 SSD appears online, equipped with mysterious CNEXLabs controller
Mar 11, 2024 pm 01:50 PM
According to news from this website on March 11, source Yuki Yasuo-YuuKi_AnS recently shared a series of pictures of a Microsoft Z1000 solid-state drive sample on the X platform. From the label information, we learned that this Z1000 is an Engineering Sample (engineering sample) with a capacity of 960GB. It was produced on May 18, 2020. It is powered by DC3.3V and has a nominal power consumption of 15W. According to sources, it supports the NVMe1.2 protocol. ▲Microsoft Z1000 SSD front photo (with label) ▲Microsoft Z1000 SSD front photo (without label) ▲Microsoft Z1000 SSD back photo ▲Microsoft Z1000 SSD back photo - master control close-up reference Yuuki Yasuho-YuuKi_An
 Microsoft plans to phase out NTLM in Windows 11 in the second half of 2024 and fully shift to Kerberos authentication
Jun 09, 2024 pm 04:17 PM
Microsoft plans to phase out NTLM in Windows 11 in the second half of 2024 and fully shift to Kerberos authentication
Jun 09, 2024 pm 04:17 PM
In the second half of 2024, the official Microsoft Security Blog published a message in response to the call from the security community. The company plans to eliminate the NTLAN Manager (NTLM) authentication protocol in Windows 11, released in the second half of 2024, to improve security. According to previous explanations, Microsoft has already made similar moves before. On October 12 last year, Microsoft proposed a transition plan in an official press release aimed at phasing out NTLM authentication methods and pushing more enterprises and users to switch to Kerberos. To help enterprises that may be experiencing issues with hardwired applications and services after turning off NTLM authentication, Microsoft provides IAKerb and
