
 Technology peripherals
AI
CMU robot dog, standing upside down and going downstairs! Release is open source
Technology peripherals
AI
CMU robot dog, standing upside down and going downstairs! Release is open source
CMU robot dog, standing upside down and going downstairs! Release is open source

There are really too many tricks for robot dogs -
But today is still amazing .
The latest results from CMU allow dogs to directly learn:
High jump twice as long as , long jump, handstand and even Handstand Down the Stairs Without further ado, just show the picture to experience it:
 △ This is the long jump
△ This is the long jump
 △ This is a high jump
△ This is a high jump
 △ Handstand Sa Huaner
△ Handstand Sa Huaner
 Needs a heavy jump The content written is: △Handstand down the stairs
Needs a heavy jump The content written is: △Handstand down the stairs
I have to say, especially the "struggle" in the high jump part makes the dog particularly soulful.
In addition to these s operations, CMU also released several parkour videos,
completely autonomous.. It’s such a refreshing feeling to step on the ridge, pass through the gap, and cross the slope
 Even if there are some "mistakes" in the middle, It will not affect its immediate progress
Even if there are some "mistakes" in the middle, It will not affect its immediate progress
 Laughing Rat, and even arranged a
Laughing Rat, and even arranged a
stress test, and the result is of course "Passed"~
 The most amazing thing is that, according to CMU, all of the above extreme operations are completed by a single neural network
The most amazing thing is that, according to CMU, all of the above extreme operations are completed by a single neural network
After hearing this, Mr. LeCun had to give him a thumbs up.
How to refine such a soul? 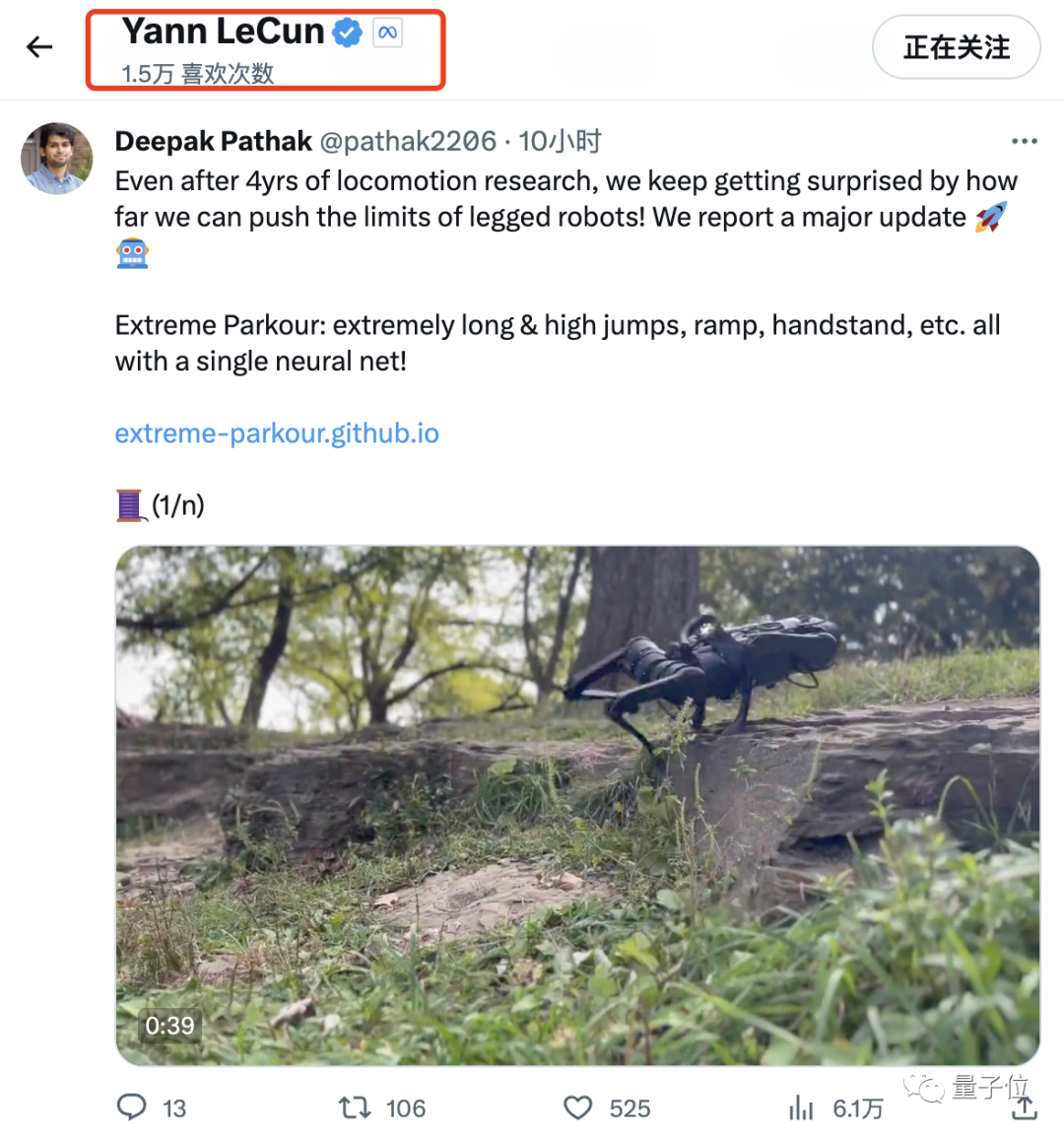
Achieve precise foot control and challenge to maximize mechanical advantage. Among them, Gym is used for simulator
Furthermore, handstand. Obviously, walking on two legs is much more difficult than walking on four However, Carnegie Mellon University's robot dog uses the same basic method to accomplish both tasks at the same time, and is even able to Stairs while maintaining an inverted stateThird, for parkour operations(the focus of this study)
, the robot dog must# through precise "eye muscle" coordination ##Decide the way forward by yourself instead of following human instructions. For example, when passing two slopes in succession, it needs to jump up the slope at a very specific angle and then immediately change direction
In order to learn CMU uses the MTS
MTS
(Mixed Teacher Student) system to teach the robot dog these correct directions. The system will only adopt it if the predicted direction is close to the true valueSpecifically, the system is divided into
two stages
: In the first stage, RL is first used to learn a movement strategy. This process can access some privileged information. In addition to environment parameters and scan points (scandots) , CMU also provides appropriate settings for the robot dog. Some
sign points(waypoints) are provided to guide the general direction.
Then, regularized online adaptation (Regularized Online Adaptation, ROA) is used to train the evaluator to recover environmental information from the observation history.
In the second stage, the strategy is extracted from the scan points (scandots) . The system will independently decide how to move forward based on the strategy and depth information, thus outputting motor commands quickly.
The whole process is like "teachers teach, students learn by analogy"
In addition to this system, because parkour requires a variety of different movements to cross obstacles, a specific design is designed for each obstacle. Reward function is also a headache.
Here, the author chose to formulate a unified and simple inner product reward function for all tasks.
It can automatically generate various rewards and can fully adapt to various terrain shapes

Without it, the dog’s performance would be poor It will look like this:

Finally, CMU also proposed a new dual distillation (dual distillation) method for extracting data from depth images Extract agile movement instructions and rapidly fluctuating forward direction.
Similarly, without it, the dog behaves like a drunkard:
After the above steps, the dog finally learned a brand new Is it exciting to be able to parkour independently and complete some difficult actions
? Don’t worry:
All of the above achievements have been made open source by CMU (look at the date, it’s still hot).
At the same time, this paper has also been released. You can get the
Introduction to the author at the end
This research was completed by Carnegie Mellon University, and a total of four authors participated
Two of them are co-authors, and both are Chinese:
One is named Xuxin Cheng. This work was completed when he was a graduate student at CMU. He is now in California A doctoral student at the University of San Diego (UCSD) , the supervisor is Wang Xiaolong; the other
is Shi Kexin, a visiting scholar at the CMU Robotics Institute. She graduated from Xi'an Jiaotong University with a bachelor's degree.
Project homepage link: https://extreme-parkour.github.io/ (including links to papers, codes, etc.)
The above is the detailed content of CMU robot dog, standing upside down and going downstairs! Release is open source. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1385
1385
 52
52

 Centos shutdown command line
Apr 14, 2025 pm 09:12 PM
Centos shutdown command line
Apr 14, 2025 pm 09:12 PM
The CentOS shutdown command is shutdown, and the syntax is shutdown [Options] Time [Information]. Options include: -h Stop the system immediately; -P Turn off the power after shutdown; -r restart; -t Waiting time. Times can be specified as immediate (now), minutes ( minutes), or a specific time (hh:mm). Added information can be displayed in system messages.
 How to check CentOS HDFS configuration
Apr 14, 2025 pm 07:21 PM
How to check CentOS HDFS configuration
Apr 14, 2025 pm 07:21 PM
Complete Guide to Checking HDFS Configuration in CentOS Systems This article will guide you how to effectively check the configuration and running status of HDFS on CentOS systems. The following steps will help you fully understand the setup and operation of HDFS. Verify Hadoop environment variable: First, make sure the Hadoop environment variable is set correctly. In the terminal, execute the following command to verify that Hadoop is installed and configured correctly: hadoopversion Check HDFS configuration file: The core configuration file of HDFS is located in the /etc/hadoop/conf/ directory, where core-site.xml and hdfs-site.xml are crucial. use
 What are the backup methods for GitLab on CentOS
Apr 14, 2025 pm 05:33 PM
What are the backup methods for GitLab on CentOS
Apr 14, 2025 pm 05:33 PM
Backup and Recovery Policy of GitLab under CentOS System In order to ensure data security and recoverability, GitLab on CentOS provides a variety of backup methods. This article will introduce several common backup methods, configuration parameters and recovery processes in detail to help you establish a complete GitLab backup and recovery strategy. 1. Manual backup Use the gitlab-rakegitlab:backup:create command to execute manual backup. This command backs up key information such as GitLab repository, database, users, user groups, keys, and permissions. The default backup file is stored in the /var/opt/gitlab/backups directory. You can modify /etc/gitlab
 Detailed explanation of docker principle
Apr 14, 2025 pm 11:57 PM
Detailed explanation of docker principle
Apr 14, 2025 pm 11:57 PM
Docker uses Linux kernel features to provide an efficient and isolated application running environment. Its working principle is as follows: 1. The mirror is used as a read-only template, which contains everything you need to run the application; 2. The Union File System (UnionFS) stacks multiple file systems, only storing the differences, saving space and speeding up; 3. The daemon manages the mirrors and containers, and the client uses them for interaction; 4. Namespaces and cgroups implement container isolation and resource limitations; 5. Multiple network modes support container interconnection. Only by understanding these core concepts can you better utilize Docker.
 How is the GPU support for PyTorch on CentOS
Apr 14, 2025 pm 06:48 PM
How is the GPU support for PyTorch on CentOS
Apr 14, 2025 pm 06:48 PM
Enable PyTorch GPU acceleration on CentOS system requires the installation of CUDA, cuDNN and GPU versions of PyTorch. The following steps will guide you through the process: CUDA and cuDNN installation determine CUDA version compatibility: Use the nvidia-smi command to view the CUDA version supported by your NVIDIA graphics card. For example, your MX450 graphics card may support CUDA11.1 or higher. Download and install CUDAToolkit: Visit the official website of NVIDIACUDAToolkit and download and install the corresponding version according to the highest CUDA version supported by your graphics card. Install cuDNN library:
 Centos install mysql
Apr 14, 2025 pm 08:09 PM
Centos install mysql
Apr 14, 2025 pm 08:09 PM
Installing MySQL on CentOS involves the following steps: Adding the appropriate MySQL yum source. Execute the yum install mysql-server command to install the MySQL server. Use the mysql_secure_installation command to make security settings, such as setting the root user password. Customize the MySQL configuration file as needed. Tune MySQL parameters and optimize databases for performance.
 How to view GitLab logs under CentOS
Apr 14, 2025 pm 06:18 PM
How to view GitLab logs under CentOS
Apr 14, 2025 pm 06:18 PM
A complete guide to viewing GitLab logs under CentOS system This article will guide you how to view various GitLab logs in CentOS system, including main logs, exception logs, and other related logs. Please note that the log file path may vary depending on the GitLab version and installation method. If the following path does not exist, please check the GitLab installation directory and configuration files. 1. View the main GitLab log Use the following command to view the main log file of the GitLabRails application: Command: sudocat/var/log/gitlab/gitlab-rails/production.log This command will display product
 How to choose the PyTorch version on CentOS
Apr 14, 2025 pm 06:51 PM
How to choose the PyTorch version on CentOS
Apr 14, 2025 pm 06:51 PM
When installing PyTorch on CentOS system, you need to carefully select the appropriate version and consider the following key factors: 1. System environment compatibility: Operating system: It is recommended to use CentOS7 or higher. CUDA and cuDNN:PyTorch version and CUDA version are closely related. For example, PyTorch1.9.0 requires CUDA11.1, while PyTorch2.0.1 requires CUDA11.3. The cuDNN version must also match the CUDA version. Before selecting the PyTorch version, be sure to confirm that compatible CUDA and cuDNN versions have been installed. Python version: PyTorch official branch
