
 Technology peripherals
AI
Language, robot breaking, MIT and others use GPT-4 to automatically generate simulation tasks and migrate them to the real world
Technology peripherals
AI
Language, robot breaking, MIT and others use GPT-4 to automatically generate simulation tasks and migrate them to the real world
Language, robot breaking, MIT and others use GPT-4 to automatically generate simulation tasks and migrate them to the real world


#In the field of robotics, implementing a general robotics strategy requires a large amount of data, and collecting this data in the real world is time-consuming and laborious. Although simulation provides an economical solution for generating different volumes of data at the scene and instance levels, increasing task diversity in simulated environments still faces challenges due to the large amount of manpower required (especially for complex tasks). This results in typical artificial simulation benchmarks typically containing only tens to hundreds of tasks.
How to solve it? In recent years, large language models have continued to make significant progress in natural language processing and code generation for various tasks. Likewise, LLM has been applied to multiple aspects of robotics, including user interfaces, task and motion planning, robot log summary, cost and reward design, revealing strong capabilities in both physics-based and code generation tasks.
In a recent study, researchers from MIT CSAIL, Shanghai Jiao Tong University and other institutions further explored whether LLM can be used to create diverse simulation tasks and further explore them Ability.
Specifically, the researchers proposed an LLM-based framework GenSim, which provides an automated mechanism for designing and verifying task asset arrangements and task progress. More importantly, the generated tasks exhibit great diversity, promoting task-level generalization of robot strategies. Furthermore, conceptually, with GenSim, the reasoning and encoding capabilities of LLM are refined into language-visual-action strategies through intermediate synthesis of simulated data.

##Paper address: https://arxiv.org/pdf/2310.01361.pdf
The GenSim framework consists of the following three parts:
- The first is a prompt mechanism that proposes new tasks through natural language instructions and the corresponding code implementation;
- Second is a task library that caches previously generated high-quality instruction code for verification and language model fine-tuning and returns it as a comprehensive task data set;
- Finally It is a language-adapted multi-task policy training process that uses generated data to enhance task-level generalization capabilities.
At the same time the framework operates through two different modes. Among them, in the goal-oriented setting, the user has a specific task or wishes to design a task course. At this time, GenSim adopts a top-down approach, taking the expected tasks as input and iteratively generating related tasks to achieve the expected goals. In an exploratory environment, if there is a lack of prior knowledge of the target task, GenSim gradually explores content beyond the existing tasks and establishes a basic strategy that is independent of the task.
In Figure 1 below, the researcher initialized a task library containing 10 manually curated tasks, used GenSim to extend it and generate more than 100 tasks.

The researchers also proposed several customized indicators to gradually measure the quality of generated simulation tasks, and Several LLMs have been evaluated in goal-directed and exploratory settings. For the task library generated by GPT-4, they performed supervised fine-tuning on LLMs such as GPT-3.5 and Code-Llama, further improving the task generation performance of LLM. At the same time, the achievability of tasks is quantitatively measured through strategy training, and task statistics of different attributes and code comparisons between different models are provided.
Not only that, the researchers also trained multi-task robot strategies that performed well on all generation tasks compared to models trained only on human planning tasks. Generalize and improve zero-shot generalization performance. Joint training with the GPT-4 generation task can improve generalization performance by 50% and transfer approximately 40% of zero-shot tasks to new tasks in simulations.
Finally, the researchers also considered simulation-to-real transfer, showing that pre-training on different simulation tasks can improve real-world generalization ability by 25%.
In summary, the strategy trained on tasks generated by different LLMs achieves better task-level generalization capabilities to new tasks, demonstrating the ability to train basic strategies through LLM extended simulation tasks potential.
Tenstorrent AI Product Management Director Shubham Saboo gave this research high praise. He said that this is a breakthrough research on GPT-4 combined with robots, using LLM such as GPT-4 to generate a robot on autopilot. A series of simulated robot tasks makes zero-sample learning and real-world adaptation of robots a reality.

Method introduction
As shown in Figure 2 below, the GenSim framework passes Procedural synthesis generates simulation environments, tasks, and demonstrations. The GenSim pipeline starts from the task creator and the prompt chain runs in two modes, goal-directed mode and exploratory mode, depending on the target task. The task library in GenSim is an in-memory component used to store previously generated high-quality tasks. The tasks stored in the task library can be used for multi-task policy training or fine-tuning LLM.

Task Creator
As shown below As shown in 3, the language chain will first generate the task description and then the related implementation. The task description includes the task name, resources, and task summary. This study uses a few-sample prompt in the pipeline to generate code.
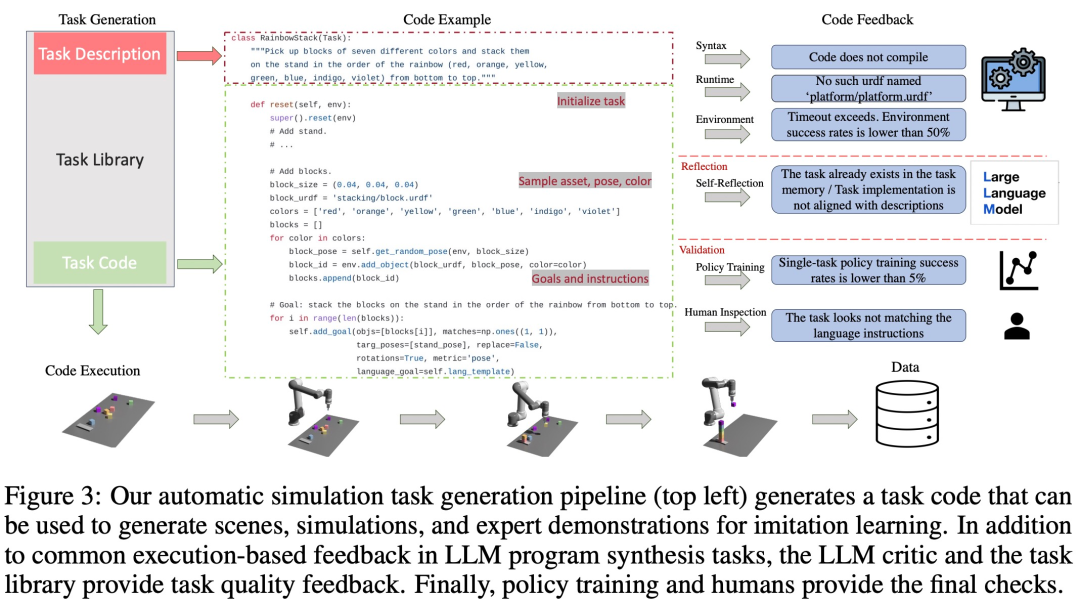
Task Library
In the GenSim framework The task library stores tasks generated by the task creator to generate better new tasks and train multi-tasking strategies. The task library is initialized based on tasks from manually created benchmarks.
The task library provides the task creator with the previous task description as a condition for the description generation phase, provides the previous code for the code generation phase, and prompts the task creator from the task library Select a reference task as an example for writing a new task. After task implementation is complete and all tests have passed, LLM is prompted to "reflect" on the new task and task library and form a comprehensive decision on whether the newly generated task should be added to the library.
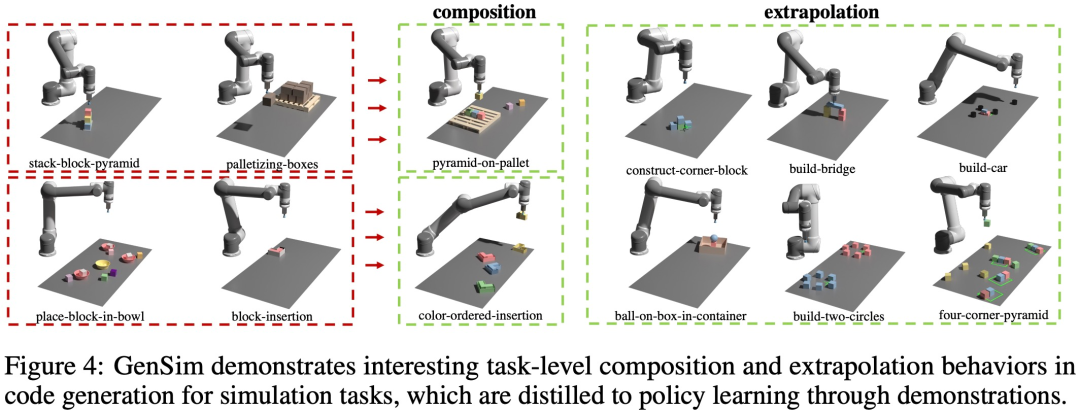
As shown in Figure 4 below, the study also observed that GenSim exhibits interesting task-level combination and extrapolation behavior:
LLM Supervised Multi-Task Strategy
After the tasks are generated, the study uses these task implementations to generate demonstrations data and train the operation strategy, using a dual-stream transmission network architecture similar to Shridhar et al. (2022).
As shown in Figure 5 below, this study regards the program as an effective representation of tasks and related demonstration data (Figure 5), and can define the embedding space between tasks, and its distance index More robust to various factors derived from perception, such as object pose and shape.

Experiments and results
This study uses experiments to verify the GenSim framework , aiming at the following specific questions: (1) How effective is LLM in designing and implementing simulation tasks? Can GenSim improve the performance of LLM in task generation? (2) Can training on tasks generated by LLM improve policy generalization ability? Would policy training benefit more if given more generation tasks? (3) Is pre-training on LLM-generated simulation tasks beneficial to real-world robot policy deployment?
Evaluate the generalization ability of LLM robot simulation tasks
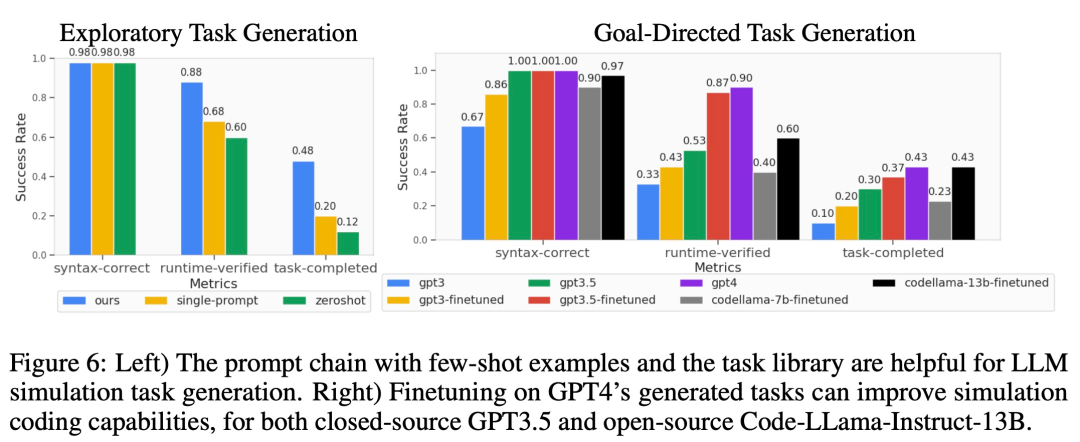
As shown in Figure 6 below, for the exploration mode and goal Guided mode task generation, two-stage prompt chain with few samples and task library can effectively improve the success rate of code generation.
Task Level Generalization
Few-sample strategy optimization for related tasks. As can be observed from the left side of Figure 7 below, jointly training the tasks generated by LLM can improve the policy performance on the original CLIPort task by more than 50%, especially in low data situations (such as 5 demos).
Zero-shot policy generalization to unseen tasks. As can be seen in Figure 7, by pre-training on more tasks generated by LLM, our model can better generalize to tasks in the original Ravens benchmark. In the middle right of Figure 7, the researchers also pre-trained on 5 tasks on different task sources, including manually written tasks, closed-source LLM, and open-source fine-tuned LLM, and observed similar zero-shot task-level generalization.

##Adapt the pre-trained model to the real world
Researchers transferred the strategies trained in the simulation environment to the real environment. The results are shown in Table 1 below. The model pre-trained on 70 GPT-4 generated tasks conducted 10 experiments on 9 tasks and achieved an average success rate of 68.8%, which is better than pre-training on the CLIPort task only. Compared with the baseline model, it has improved by more than 25%, and compared with the model pre-trained on only 50 tasks, it has improved by 15%.

The researchers also observed that pre-training on different simulation tasks improved the robustness of long-term complex tasks. For example, GPT-4 pre-trained models show more robust performance on real-world build-wheel tasks.

Ablation experiment
Simulation training successful Rate. In Table 2 below, the researchers demonstrate the success rates of single-task and multi-task policy training on a subset of generated tasks with 200 demos. For policy training on GPT-4 generation tasks, its average task success rate is 75.8% for single tasks and 74.1% for multi-tasks.

Generate task statistics. In Figure 9 (a) below, the researcher shows the task statistics of different features of the 120 tasks generated by LLM. There is an interesting balance between the colors, assets, actions, and number of instances generated by the LLM model. For example, the generated code contains a lot of scenes with more than 7 object instances, as well as a lot of pick-and-place primitive actions and assets like blocks.
Code generation comparison. In Figure 9(b) below, the researchers qualitatively evaluate the failure cases in the top-down experiments of GPT-4 and Code Llama.

Please refer to the original paper for more technical details.
The above is the detailed content of Language, robot breaking, MIT and others use GPT-4 to automatically generate simulation tasks and migrate them to the real world. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 Use ddrescue to recover data on Linux
Mar 20, 2024 pm 01:37 PM
Use ddrescue to recover data on Linux
Mar 20, 2024 pm 01:37 PM
DDREASE is a tool for recovering data from file or block devices such as hard drives, SSDs, RAM disks, CDs, DVDs and USB storage devices. It copies data from one block device to another, leaving corrupted data blocks behind and moving only good data blocks. ddreasue is a powerful recovery tool that is fully automated as it does not require any interference during recovery operations. Additionally, thanks to the ddasue map file, it can be stopped and resumed at any time. Other key features of DDREASE are as follows: It does not overwrite recovered data but fills the gaps in case of iterative recovery. However, it can be truncated if the tool is instructed to do so explicitly. Recover data from multiple files or blocks to a single
 Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
0.What does this article do? We propose DepthFM: a versatile and fast state-of-the-art generative monocular depth estimation model. In addition to traditional depth estimation tasks, DepthFM also demonstrates state-of-the-art capabilities in downstream tasks such as depth inpainting. DepthFM is efficient and can synthesize depth maps within a few inference steps. Let’s read about this work together ~ 1. Paper information title: DepthFM: FastMonocularDepthEstimationwithFlowMatching Author: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas officially enters the era of electric robots! Yesterday, the hydraulic Atlas just "tearfully" withdrew from the stage of history. Today, Boston Dynamics announced that the electric Atlas is on the job. It seems that in the field of commercial humanoid robots, Boston Dynamics is determined to compete with Tesla. After the new video was released, it had already been viewed by more than one million people in just ten hours. The old people leave and new roles appear. This is a historical necessity. There is no doubt that this year is the explosive year of humanoid robots. Netizens commented: The advancement of robots has made this year's opening ceremony look like a human, and the degree of freedom is far greater than that of humans. But is this really not a horror movie? At the beginning of the video, Atlas is lying calmly on the ground, seemingly on his back. What follows is jaw-dropping
 Google is ecstatic: JAX performance surpasses Pytorch and TensorFlow! It may become the fastest choice for GPU inference training
Apr 01, 2024 pm 07:46 PM
Google is ecstatic: JAX performance surpasses Pytorch and TensorFlow! It may become the fastest choice for GPU inference training
Apr 01, 2024 pm 07:46 PM
The performance of JAX, promoted by Google, has surpassed that of Pytorch and TensorFlow in recent benchmark tests, ranking first in 7 indicators. And the test was not done on the TPU with the best JAX performance. Although among developers, Pytorch is still more popular than Tensorflow. But in the future, perhaps more large models will be trained and run based on the JAX platform. Models Recently, the Keras team benchmarked three backends (TensorFlow, JAX, PyTorch) with the native PyTorch implementation and Keras2 with TensorFlow. First, they select a set of mainstream
 Slow Cellular Data Internet Speeds on iPhone: Fixes
May 03, 2024 pm 09:01 PM
Slow Cellular Data Internet Speeds on iPhone: Fixes
May 03, 2024 pm 09:01 PM
Facing lag, slow mobile data connection on iPhone? Typically, the strength of cellular internet on your phone depends on several factors such as region, cellular network type, roaming type, etc. There are some things you can do to get a faster, more reliable cellular Internet connection. Fix 1 – Force Restart iPhone Sometimes, force restarting your device just resets a lot of things, including the cellular connection. Step 1 – Just press the volume up key once and release. Next, press the Volume Down key and release it again. Step 2 – The next part of the process is to hold the button on the right side. Let the iPhone finish restarting. Enable cellular data and check network speed. Check again Fix 2 – Change data mode While 5G offers better network speeds, it works better when the signal is weaker
 The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
I cry to death. The world is madly building big models. The data on the Internet is not enough. It is not enough at all. The training model looks like "The Hunger Games", and AI researchers around the world are worrying about how to feed these data voracious eaters. This problem is particularly prominent in multi-modal tasks. At a time when nothing could be done, a start-up team from the Department of Renmin University of China used its own new model to become the first in China to make "model-generated data feed itself" a reality. Moreover, it is a two-pronged approach on the understanding side and the generation side. Both sides can generate high-quality, multi-modal new data and provide data feedback to the model itself. What is a model? Awaker 1.0, a large multi-modal model that just appeared on the Zhongguancun Forum. Who is the team? Sophon engine. Founded by Gao Yizhao, a doctoral student at Renmin University’s Hillhouse School of Artificial Intelligence.
 Kuaishou version of Sora 'Ke Ling' is open for testing: generates over 120s video, understands physics better, and can accurately model complex movements
Jun 11, 2024 am 09:51 AM
Kuaishou version of Sora 'Ke Ling' is open for testing: generates over 120s video, understands physics better, and can accurately model complex movements
Jun 11, 2024 am 09:51 AM
What? Is Zootopia brought into reality by domestic AI? Exposed together with the video is a new large-scale domestic video generation model called "Keling". Sora uses a similar technical route and combines a number of self-developed technological innovations to produce videos that not only have large and reasonable movements, but also simulate the characteristics of the physical world and have strong conceptual combination capabilities and imagination. According to the data, Keling supports the generation of ultra-long videos of up to 2 minutes at 30fps, with resolutions up to 1080p, and supports multiple aspect ratios. Another important point is that Keling is not a demo or video result demonstration released by the laboratory, but a product-level application launched by Kuaishou, a leading player in the short video field. Moreover, the main focus is to be pragmatic, not to write blank checks, and to go online as soon as it is released. The large model of Ke Ling is already available in Kuaiying.
 The U.S. Air Force showcases its first AI fighter jet with high profile! The minister personally conducted the test drive without interfering during the whole process, and 100,000 lines of code were tested for 21 times.
May 07, 2024 pm 05:00 PM
The U.S. Air Force showcases its first AI fighter jet with high profile! The minister personally conducted the test drive without interfering during the whole process, and 100,000 lines of code were tested for 21 times.
May 07, 2024 pm 05:00 PM
Recently, the military circle has been overwhelmed by the news: US military fighter jets can now complete fully automatic air combat using AI. Yes, just recently, the US military’s AI fighter jet was made public for the first time and the mystery was unveiled. The full name of this fighter is the Variable Stability Simulator Test Aircraft (VISTA). It was personally flown by the Secretary of the US Air Force to simulate a one-on-one air battle. On May 2, U.S. Air Force Secretary Frank Kendall took off in an X-62AVISTA at Edwards Air Force Base. Note that during the one-hour flight, all flight actions were completed autonomously by AI! Kendall said - "For the past few decades, we have been thinking about the unlimited potential of autonomous air-to-air combat, but it has always seemed out of reach." However now,
