

What are the relative positioning control algorithms?

Control algorithms include PI controller, PID controller, model predictive controller, adaptive controller, fuzzy controller, neural network controller, etc. Detailed introduction: 1. PI controller is a basic closed-loop control system that realizes real-time correction of system errors through proportional and integral control methods. The controller has a simple structure, but may have overshoot; 2. The PID controller is an improved version of the PI controller, which introduces differential control, which can respond more quickly to system error changes and reduce overshoot. In the field of industrial control Be widely used and so on.
Operating system for this tutorial: Windows 10 system, Dell G3 computer.
The relative positioning control algorithm is mainly used in the field of automation control to realize the positioning and control of moving objects. The following are some common relative positioning control algorithms:
Proportional--Integral (PI) controller: PI controller is a basic closed-loop control system, which uses proportional and integral Control mode to realize real-time correction of system errors. The controller has a simple structure, but may have overshoot.
Proportional--Integral--Derivative (PID) controller: The PID controller is an improved version of the PI controller. It introduces differential control and can respond more quickly to system error changes. Reduce overshoot. PID controllers are widely used in industrial control fields.
Model Predictive Controller (MPC): The MPC controller is a predictive control algorithm based on a mathematical model that develops optimal control strategies by predicting future system output. MPC controller is suitable for multi-variable, multi-constraint complex system control.
Adaptive controller: The adaptive controller can automatically adjust control parameters according to the dynamic characteristics and uncertainty of the system to achieve stable control of the system. Common adaptive controllers include adaptive proportional-integral-derivative (APID) controller, adaptive integral controller, etc.
Fuzzy controller: The fuzzy controller uses fuzzy logic theory to fuzzify the uncertainty of the system and realize fuzzy control of the system. Fuzzy controller is suitable for complex systems such as nonlinear, time-varying, and time-delay systems.
Neural network controller: The neural network controller uses artificial neural networks to learn and predict the dynamic characteristics of the system and formulate optimal control strategies. Neural network controller has strong nonlinear fitting ability and is suitable for the control of complex systems.
In short, there are many kinds of relative positioning control algorithms, and different algorithms are suitable for different control objects and scenarios. In practical applications, it is necessary to select an appropriate relative positioning control algorithm based on specific needs and conditions.
The above is the detailed content of What are the relative positioning control algorithms?. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 Does sticky positioning break away from the document flow?
Feb 20, 2024 pm 05:24 PM
Does sticky positioning break away from the document flow?
Feb 20, 2024 pm 05:24 PM
Does sticky positioning break away from the document flow? Specific code examples are needed. In web development, layout is a very important topic. Among them, positioning is one of the commonly used layout techniques. In CSS, there are three common positioning methods: static positioning, relative positioning and absolute positioning. In addition to these three positioning methods, there is also a more special positioning method, namely sticky positioning. So, does sticky positioning break away from the document flow? Let’s discuss it in detail below and provide some code examples to help understand. First, we need to understand what document flow is
 How to position elements in css
Apr 26, 2024 am 10:24 AM
How to position elements in css
Apr 26, 2024 am 10:24 AM
There are four methods of CSS element positioning: static, relative, absolute, and fixed positioning. Static positioning is the default and the element is not affected by positioning rules. Relative positioning moves an element relative to itself without affecting document flow. Absolute positioning removes an element from the document flow and positions it relative to its ancestor elements. Fixed positioning positions an element relative to the viewport, always keeping it in the same position on the screen.
 Detailed explanation of rotational position encoding RoPE commonly used in large language models: why is it better than absolute or relative position encoding?
Apr 01, 2024 pm 08:19 PM
Detailed explanation of rotational position encoding RoPE commonly used in large language models: why is it better than absolute or relative position encoding?
Apr 01, 2024 pm 08:19 PM
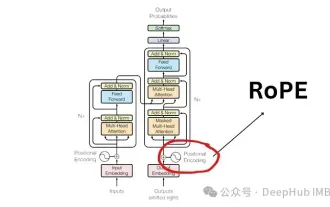
Since the "AttentionIsAllYouNeed" paper published in 2017, the Transformer architecture has been a cornerstone of the natural language processing (NLP) field. Its design has remained largely unchanged for years, with 2022 marking a major development in the field with the introduction of Rotary Position Encoding (RoPE). Rotated position embedding is the state-of-the-art NLP position embedding technique. Most popular large-scale language models (such as Llama, Llama2, PaLM and CodeGen) already use it. In this article, we’ll take a deep dive into what rotational position encodings are and how they neatly combine the benefits of absolute and relative position embeddings. The need for positional encoding in order to understand Ro
 bottom attribute syntax in CSS
Feb 21, 2024 pm 03:30 PM
bottom attribute syntax in CSS
Feb 21, 2024 pm 03:30 PM
Bottom attribute syntax and code examples in CSS In CSS, the bottom attribute is used to specify the distance between an element and the bottom of the container. It controls the position of an element relative to the bottom of its parent element. The syntax of the bottom attribute is as follows: element{bottom:value;} where element represents the element to which the style is to be applied, and value represents the bottom value to be set. value can be a specific length value, such as pixels
 What is layout layout?
Feb 24, 2024 pm 03:03 PM
What is layout layout?
Feb 24, 2024 pm 03:03 PM
Layout refers to a typesetting method adopted in web design to arrange and display web page elements according to certain rules and structures. Through reasonable layout, the webpage can be made more beautiful and neat, and achieve a good user experience. In front-end development, there are many layout methods to choose from, such as traditional table layout, floating layout, positioning layout, etc. However, with the promotion of HTML5 and CSS3, modern responsive layout technologies, such as Flexbox layout and Grid layout, have become
 How to center the box in html5
Apr 05, 2024 pm 12:27 PM
How to center the box in html5
Apr 05, 2024 pm 12:27 PM
To center the box in HTML5, there are the following methods: horizontal centering: text-align: centermargin: autodisplay: flex; justify-content: center; vertical centering: vertical-align: middletransform: translate(-50%, -50%); position: absolute; top: 50%; left: 50%; transform: translate(-50%, -50%);
 What are relative positioning technologies?
Oct 19, 2023 pm 05:42 PM
What are relative positioning technologies?
Oct 19, 2023 pm 05:42 PM
Relative positioning technologies include radio ranging, sonar, laser ranging, cameras, inertial navigation, satellite navigation, indoor positioning, ultrasonic, infrared, electromagnetic waves, Bluetooth positioning, Wi-Fi positioning, ultrasonic ranging, infrared ranging, and laser ranging. , camera visual positioning, RSSI-based positioning, TOA-based positioning, TDOA-based positioning, AOA-based positioning, etc. Detailed introduction: 1. Radio ranging: Calculate the distance by measuring the time difference of radio waves from the transmitting point to the receiving point; 2. Sonar technology, etc.
 Quickly master the techniques and methods of static relative positioning
Jan 18, 2024 am 11:18 AM
Quickly master the techniques and methods of static relative positioning
Jan 18, 2024 am 11:18 AM
Fast static relative positioning is a very important positioning method in web development. It allows an element to be slightly adjusted relative to its normal position while still maintaining its position in the document flow. In this article, I will introduce in detail the use of fast static relative positioning, as well as some common application scenarios. First, we need to understand the basic concepts of fast static relative positioning. In CSS, there are four ways to position elements: static positioning, relative positioning, absolute positioning and fixed positioning. Static positioning is the default positioning method. The position of the element is determined by the document.