
 Technology peripherals
AI
Realistic, controllable, and scalable, the autonomous driving lighting simulation platform LightSim is newly launched
Technology peripherals
AI
Realistic, controllable, and scalable, the autonomous driving lighting simulation platform LightSim is newly launched
Realistic, controllable, and scalable, the autonomous driving lighting simulation platform LightSim is newly launched

Recently, researchers from Waabi AI, University of Toronto, University of Waterloo and MIT proposed a new autonomous driving lighting simulation platform LightSim at NeurIPS 2023. The researchers proposed a method to generate paired illumination training data from real data, solving the problems of missing data and model migration loss. LightSim uses neural radiation fields (NeRF) and physics-based deep networks to render vehicle driving videos, achieving lighting simulation of dynamic scenes on large-scale real data for the first time
- Project website: https://waabi.ai/lightsim
- Paper link: https://openreview.net /pdf?id=mcx8IGneYw
Why is automatic driving lighting simulation needed?
In robotics, camera simulation is very important, especially for autonomous vehicles to perceive outdoor scenes. However, existing camera perception systems perform poorly when encountering untrained outdoor lighting conditions. By using camera simulation to generate diverse outdoor lighting change data sets, the stability of the autonomous driving system can be improved.
Common camera simulation methods are generally based on physics engines. This method renders the scene by setting the 3D model and lighting conditions. However, simulation effects often lack diversity and are not realistic enough. Furthermore, due to the limited number of high-quality 3D models, the physical rendering results do not exactly match the real-world scenes. This leads to poor generalization ability of the trained model on real data.
Another approach is based on data-driven simulation. This approach uses neural rendering technology to reconstruct a digital twin of the real world to replicate the data observed by the sensors. This way we can create scenes with more flexibility and increase realism. However, the current technology embeds the lighting information of the scene into the 3D model, which limits the editing of the digital twin, such as changing lighting conditions or adding or deleting objects.
In a work from NeurIPS 2023, researchers from Waabi AI demonstrated a lighting simulation system LightSim based on a physics engine and neural network: Neural Lighting Simulation for Urban Scenes.
Different from previous work, LightSim can achieve the following points at the same time:
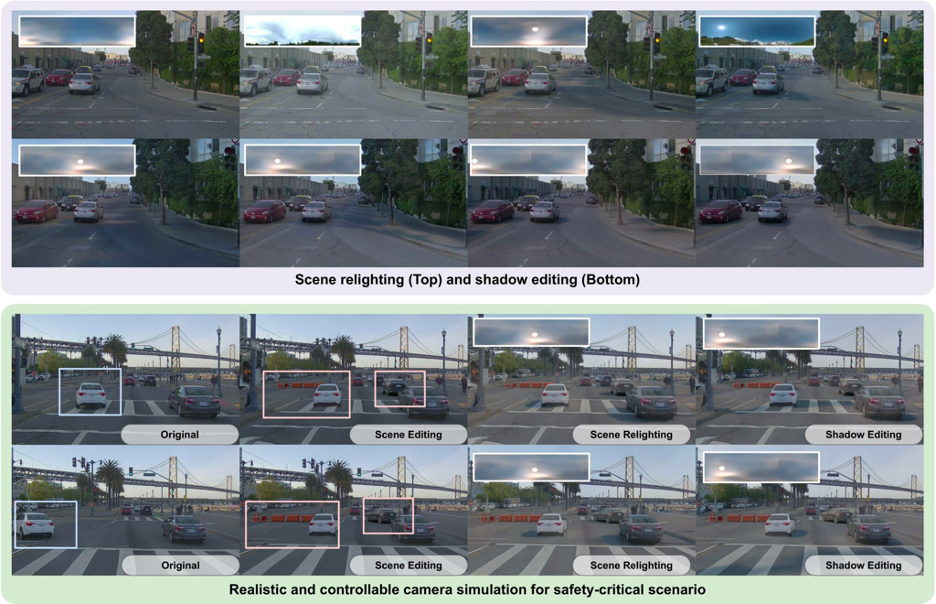
1. Realistic: For the first time, it can be done correctly Perform lighting simulation on large-scale outdoor dynamic scenes, and can more accurately simulate shadows, lighting effects between objects, etc.
2. Controllable: Supports editing of dynamic driving scenes (adding, deleting objects, camera positions and parameters, changing lighting, and generating safety-critical scenes etc.), thereby generating more realistic and consistent videos to improve the system's robustness to lighting and edge conditions.
3. Scalable: It is easy to expand to more scenarios and different data sets. You only need to collect data once (single pass). Reconstruct and conduct realistic and controllable simulation tests.

Building a simulation system
Step one: Build a real-world reusable Lighting Digital Twin
To reconstruct autonomous driving scenes in the digital world, LightSim first divides dynamic objects and static scenes from the collected data. This step uses UniSim to reconstruct the scene and remove camera view dependence in the network. Then use the marching cube to get the geometry, and further convert it to a mesh with basic materials.

In addition to materials and geometry, LightSim can also estimate outdoor lighting based on the sun and sky, the main light sources of outdoor daytime scenes, and obtain a high dynamic range environment map (HDR Sky dome). Using sensor data and extracted geometry, LightSim can estimate an incomplete panoramic image and then complete it to obtain a full 360° view of the sky. This panoramic image and GPS information are then used to generate an HDR environment map that accurately estimates sun intensity, sun direction and sky appearance.

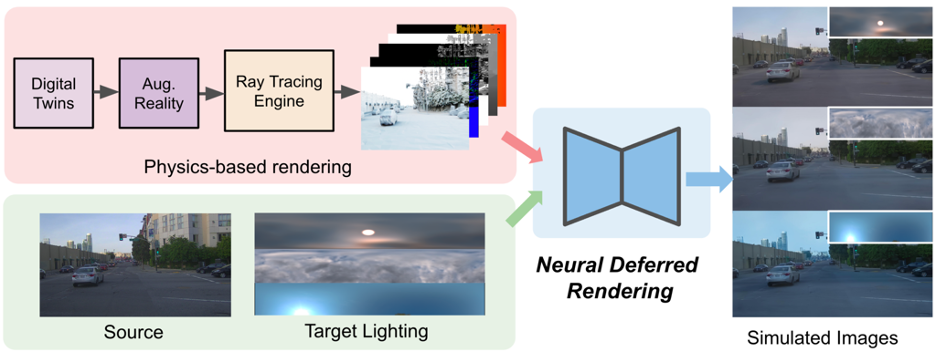
#After the digital twin is obtained, it can be further modified, such as adding or removing objects, changing vehicle trajectories or changing lighting, etc., to Generating representations for augmented reality. LightSim will perform physically based rendering, generating lighting-related data such as base color, depth, normal vectors, and shadows for modifying the scene. Using this lighting-related data and an estimate of the scene's source and target lighting conditions, the LightSim workflow is as follows.
Although physically based rendered images are good at reconstructing the lighting effects in a scene, they suffer from imperfections in geometry and material/lighting decomposition. Errors in rendering results often lack realism, such as blur, unrealistic surface reflections, and boundary artifacts. Therefore, researchers propose neural deferred rendering for enhanced realism. They introduced an image synthesis network that generates the final image using source images in a precomputed buffer and lighting-related data generated by the rendering engine. At the same time, the method in the paper also provides the network with an environment map to enhance the lighting context, and generates paired images through the digital twin, providing a novel pairwise simulation and real data training scheme
Simulation capability display
Change the lighting of the scene (Scene Relighting)
LightSim can render the same scene in a time-consistent manner under new lighting conditions. As shown in the video, the new sun position and sky appearance cause the scene's shadows and appearance to change.
LightSim can automatically batch re-light the scene. It can generate new, time-consistent, 3D-aware lighting changes from estimated and real HDR environment maps that are identical to the original scene
Image Correction (Image Correction)
LightSim's lighting representation is editable and can change the direction of the sun, thus updating lighting changes and shadows related to the direction of the sun's light. By rotating the HDR environment map and passing it to the Neural Deferred Rendering module, LightSim generates the following videoLightSim also supports batch editing of shadows
Lighting-Aware Character Insertion
In addition to modifying lighting, LightSim can also modify unusual objects ( such as architectural obstacles) to perform lighting-aware additions. These added objects can update the object's lighting shadows, accurately occlude objects, and spatially adapt to the entire camera configuration.
############Simulation migration (Generalization to nuScenes)#####################Due to LightSim’s neural deferred rendering network It is trained on multiple driving videos, so LightSim can be generalized to new scenarios. The following video demonstrates LightSim's generalization capabilities for driving scenes in nuScenes. LightSim can build a lighting-aware digital twin of each scene, which is then applied to a neural deferred rendering model pre-trained on PandaSet. LightSim has good migration performance and can provide a more robust solution for scene relighting############Real and controllable camera simulation############Comprehensive With all the features demonstrated above, LightSim enables controllable, diverse and realistic camera simulations. The following video demonstrates LightSim's scene simulation capabilities. In the video, a white car made an emergency lane change to the SDV lane, introducing a new roadblock, which caused the white car to enter a completely new scene. The effects generated by LightSim under various lighting conditions in the new scene are as follows: . ######In the video below, a new example is demonstrated. New obstacles have been inserted into existing road obstacles and a new set of vehicles have been added. By using LightSim for simulated lighting, newly added vehicles can be perfectly integrated into the scene
Summary and Outlook
LightSim is a tool that can A lighting-aware camera simulation platform that provides services for processing large-scale dynamic driving scenarios. It can build a lighting-aware digital twin based on real-world data and modify it to create new scenes with different object layouts and autonomous vehicle perspectives. LightSim is capable of simulating new lighting conditions, enabling diverse, realistic and controllable camera simulations to produce temporally/spatially consistent videos. It is worth noting that LightSim can also be combined with reverse rendering, weather simulation and other technologies to further improve simulation performance
The above is the detailed content of Realistic, controllable, and scalable, the autonomous driving lighting simulation platform LightSim is newly launched. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1386
1386
 52
52

 Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
0.What does this article do? We propose DepthFM: a versatile and fast state-of-the-art generative monocular depth estimation model. In addition to traditional depth estimation tasks, DepthFM also demonstrates state-of-the-art capabilities in downstream tasks such as depth inpainting. DepthFM is efficient and can synthesize depth maps within a few inference steps. Let’s read about this work together ~ 1. Paper information title: DepthFM: FastMonocularDepthEstimationwithFlowMatching Author: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Imagine an artificial intelligence model that not only has the ability to surpass traditional computing, but also achieves more efficient performance at a lower cost. This is not science fiction, DeepSeek-V2[1], the world’s most powerful open source MoE model is here. DeepSeek-V2 is a powerful mixture of experts (MoE) language model with the characteristics of economical training and efficient inference. It consists of 236B parameters, 21B of which are used to activate each marker. Compared with DeepSeek67B, DeepSeek-V2 has stronger performance, while saving 42.5% of training costs, reducing KV cache by 93.3%, and increasing the maximum generation throughput to 5.76 times. DeepSeek is a company exploring general artificial intelligence
 AI subverts mathematical research! Fields Medal winner and Chinese-American mathematician led 11 top-ranked papers | Liked by Terence Tao
Apr 09, 2024 am 11:52 AM
AI subverts mathematical research! Fields Medal winner and Chinese-American mathematician led 11 top-ranked papers | Liked by Terence Tao
Apr 09, 2024 am 11:52 AM
AI is indeed changing mathematics. Recently, Tao Zhexuan, who has been paying close attention to this issue, forwarded the latest issue of "Bulletin of the American Mathematical Society" (Bulletin of the American Mathematical Society). Focusing on the topic "Will machines change mathematics?", many mathematicians expressed their opinions. The whole process was full of sparks, hardcore and exciting. The author has a strong lineup, including Fields Medal winner Akshay Venkatesh, Chinese mathematician Zheng Lejun, NYU computer scientist Ernest Davis and many other well-known scholars in the industry. The world of AI has changed dramatically. You know, many of these articles were submitted a year ago.
 Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas officially enters the era of electric robots! Yesterday, the hydraulic Atlas just "tearfully" withdrew from the stage of history. Today, Boston Dynamics announced that the electric Atlas is on the job. It seems that in the field of commercial humanoid robots, Boston Dynamics is determined to compete with Tesla. After the new video was released, it had already been viewed by more than one million people in just ten hours. The old people leave and new roles appear. This is a historical necessity. There is no doubt that this year is the explosive year of humanoid robots. Netizens commented: The advancement of robots has made this year's opening ceremony look like a human, and the degree of freedom is far greater than that of humans. But is this really not a horror movie? At the beginning of the video, Atlas is lying calmly on the ground, seemingly on his back. What follows is jaw-dropping
 KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
Earlier this month, researchers from MIT and other institutions proposed a very promising alternative to MLP - KAN. KAN outperforms MLP in terms of accuracy and interpretability. And it can outperform MLP running with a larger number of parameters with a very small number of parameters. For example, the authors stated that they used KAN to reproduce DeepMind's results with a smaller network and a higher degree of automation. Specifically, DeepMind's MLP has about 300,000 parameters, while KAN only has about 200 parameters. KAN has a strong mathematical foundation like MLP. MLP is based on the universal approximation theorem, while KAN is based on the Kolmogorov-Arnold representation theorem. As shown in the figure below, KAN has
 The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
I cry to death. The world is madly building big models. The data on the Internet is not enough. It is not enough at all. The training model looks like "The Hunger Games", and AI researchers around the world are worrying about how to feed these data voracious eaters. This problem is particularly prominent in multi-modal tasks. At a time when nothing could be done, a start-up team from the Department of Renmin University of China used its own new model to become the first in China to make "model-generated data feed itself" a reality. Moreover, it is a two-pronged approach on the understanding side and the generation side. Both sides can generate high-quality, multi-modal new data and provide data feedback to the model itself. What is a model? Awaker 1.0, a large multi-modal model that just appeared on the Zhongguancun Forum. Who is the team? Sophon engine. Founded by Gao Yizhao, a doctoral student at Renmin University’s Hillhouse School of Artificial Intelligence.
 Kuaishou version of Sora 'Ke Ling' is open for testing: generates over 120s video, understands physics better, and can accurately model complex movements
Jun 11, 2024 am 09:51 AM
Kuaishou version of Sora 'Ke Ling' is open for testing: generates over 120s video, understands physics better, and can accurately model complex movements
Jun 11, 2024 am 09:51 AM
What? Is Zootopia brought into reality by domestic AI? Exposed together with the video is a new large-scale domestic video generation model called "Keling". Sora uses a similar technical route and combines a number of self-developed technological innovations to produce videos that not only have large and reasonable movements, but also simulate the characteristics of the physical world and have strong conceptual combination capabilities and imagination. According to the data, Keling supports the generation of ultra-long videos of up to 2 minutes at 30fps, with resolutions up to 1080p, and supports multiple aspect ratios. Another important point is that Keling is not a demo or video result demonstration released by the laboratory, but a product-level application launched by Kuaishou, a leading player in the short video field. Moreover, the main focus is to be pragmatic, not to write blank checks, and to go online as soon as it is released. The large model of Ke Ling is already available in Kuaiying.
 FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
Target detection is a relatively mature problem in autonomous driving systems, among which pedestrian detection is one of the earliest algorithms to be deployed. Very comprehensive research has been carried out in most papers. However, distance perception using fisheye cameras for surround view is relatively less studied. Due to large radial distortion, standard bounding box representation is difficult to implement in fisheye cameras. To alleviate the above description, we explore extended bounding box, ellipse, and general polygon designs into polar/angular representations and define an instance segmentation mIOU metric to analyze these representations. The proposed model fisheyeDetNet with polygonal shape outperforms other models and simultaneously achieves 49.5% mAP on the Valeo fisheye camera dataset for autonomous driving
