
 Technology peripherals
AI
Discuss route planning analysis of pathfinding algorithm and code implementation
Technology peripherals
AI
Discuss route planning analysis of pathfinding algorithm and code implementation
Discuss route planning analysis of pathfinding algorithm and code implementation


The pathfinding algorithm is one of the commonly used algorithms in the fields of computer graphics and artificial intelligence. It is used to calculate the shortest path or optimal path from one point to another. . In this article, I will introduce in detail two commonly used pathfinding algorithms: Dijkstra's algorithm and A* algorithm
Dijkstra's algorithm
Dijkstra's algorithm It is a breadth-first search algorithm used to find the shortest path between two points in a graph. It works as follows:
We need to create a set S to store the vertices that have found the shortest path
We need to create a set Q , used to store vertices that have not yet found the shortest path
When initializing the distance array dist, you need to set the distance from the starting point to other points to infinity, and the distance from the starting point to itself is Set to 0
Repeat the following steps until the set Q is empty:
- Find the closest distance to the starting point in the set Q vertex u and add it to the set S.
- For each neighbor vertex v of vertex u, update the distance dist[v] from the starting point to v, if dist[v] > dist[u] edge(u, v) , then update dist[v] to dist[u] edge(u, v).
Finally, the dist array stores the shortest path from the starting point to each vertex
The following is written in C# Source code of Dijkstra's algorithm:
class DijkstraAlgorithm
{
private int[,] graph;
private int size;
public DijkstraAlgorithm(int[,] graph)
{
this.graph = graph;
this.size = graph.GetLength(0);
}
public int[] FindShortestPath(int start, int end)
{
int[] dist = new int[size];
bool[] visited = new bool[size];
for (int i = 0; i <h4 id="span-A-algorithm-span"><span>A algorithm</span></h4><p>##A algorithm is a heuristic search algorithm used to find two points in the graph the shortest path between them. The idea of the algorithm is as follows: <span></span></p><p>Create a priority queue openSet to store the vertices to be explored<span></span></p><p>We need to create an array named gScore, using To store the actual cost from the starting point to each vertex<span></span></p><p>We need to create an array named fScore to store the estimated cost from the starting point to the target point<span> </span></p><p>Add the starting point to openSet, set gScore[start] to 0, and set fScore[start] to the estimated cost from the starting point to the target point<span></span></p><p>Repeat the following steps until openSet is empty: <span></span></p>- Find the vertex current with the smallest fScore in openSet.
- If current is equal to the target point, it means that the shortest path has been found and the path is returned.
- Remove current from openSet.
- For each neighbor vertex neighbor of current, calculate the actual cost tempGScore from the starting point to the neighbor. If tempGScore is less than gScore[neighbor], update gScore[neighbor] to tempGScore, and calculate fScore[neighbor] = gScore[neighbor] estimated cost. If neighbor is not in openSet, add it to openSet.
If openSet is empty, it means that the target point cannot be reached and a null value is returned
The following is A* written in Java Source code of the algorithm:
import java.util.*;class AStarAlgorithm {private int[][] graph;private int size;public AStarAlgorithm(int[][] graph) {this.graph = graph;this.size = graph.length;}public List<integer> findShortestPath(int start, int end) {PriorityQueue<node> openSet = new PriorityQueue();int[] gScore = new int[size];int[] fScore = new int[size];int[] cameFrom = new int[size];boolean[] visited = new boolean[size];Arrays.fill(gScore, Integer.MAX_VALUE);Arrays.fill(fScore, Integer.MAX_VALUE);Arrays.fill(cameFrom, -1);gScore[start] = 0;fScore[start] = heuristicCostEstimate(start, end);openSet.offer(new Node(start, fScore[start]));while (!openSet.isEmpty()) {int current = openSet.poll().index;if (current == end) {return reconstructPath(cameFrom, current);}visited[current] = true;for (int neighbor = 0; neighbor reconstructPath(int[] cameFrom, int current) {List<integer> path = new ArrayList();path.add(current);while (cameFrom[current] != -1) {current = cameFrom[current];path.add(0, current);}return path;}private class Node implements Comparable<node> {public int index;public int fScore;public Node(int index, int fScore) {this.index = index;this.fScore = fScore;}@Overridepublic int compareTo(Node other) {return Integer.compare(this.fScore, other.fScore);}@Overridepublic boolean equals(Object obj) {if (this == obj) {return true;}if (obj == null || getClass() != obj.getClass()) {return false;}Node other = (Node) obj;return index == other.index;}@Overridepublic int hashCode() {return Objects.hash(index);}}}</node></integer></node></integer> The above is a detailed introduction to the Dijkstra algorithm and the A* algorithm, including the algorithm idea, process and source code implemented in C# or Java. These two algorithms are commonly used pathfinding algorithms and can be selected and used according to specific needs. Of course, in today’s cities, navigation software can plan things for us.
The above is the detailed content of Discuss route planning analysis of pathfinding algorithm and code implementation. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1387
1387
 52
52

 Top 5 GenAI Launches of February 2025: GPT-4.5, Grok-3 & More!
Mar 22, 2025 am 10:58 AM
Top 5 GenAI Launches of February 2025: GPT-4.5, Grok-3 & More!
Mar 22, 2025 am 10:58 AM
February 2025 has been yet another game-changing month for generative AI, bringing us some of the most anticipated model upgrades and groundbreaking new features. From xAI’s Grok 3 and Anthropic’s Claude 3.7 Sonnet, to OpenAI’s G
 How to Use YOLO v12 for Object Detection?
Mar 22, 2025 am 11:07 AM
How to Use YOLO v12 for Object Detection?
Mar 22, 2025 am 11:07 AM
YOLO (You Only Look Once) has been a leading real-time object detection framework, with each iteration improving upon the previous versions. The latest version YOLO v12 introduces advancements that significantly enhance accuracy
 Best AI Art Generators (Free & Paid) for Creative Projects
Apr 02, 2025 pm 06:10 PM
Best AI Art Generators (Free & Paid) for Creative Projects
Apr 02, 2025 pm 06:10 PM
The article reviews top AI art generators, discussing their features, suitability for creative projects, and value. It highlights Midjourney as the best value for professionals and recommends DALL-E 2 for high-quality, customizable art.
 Is ChatGPT 4 O available?
Mar 28, 2025 pm 05:29 PM
Is ChatGPT 4 O available?
Mar 28, 2025 pm 05:29 PM
ChatGPT 4 is currently available and widely used, demonstrating significant improvements in understanding context and generating coherent responses compared to its predecessors like ChatGPT 3.5. Future developments may include more personalized interactions and real-time data processing capabilities, further enhancing its potential for various applications.
 Best AI Chatbots Compared (ChatGPT, Gemini, Claude & More)
Apr 02, 2025 pm 06:09 PM
Best AI Chatbots Compared (ChatGPT, Gemini, Claude & More)
Apr 02, 2025 pm 06:09 PM
The article compares top AI chatbots like ChatGPT, Gemini, and Claude, focusing on their unique features, customization options, and performance in natural language processing and reliability.
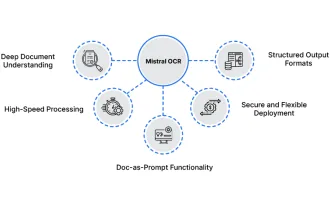 How to Use Mistral OCR for Your Next RAG Model
Mar 21, 2025 am 11:11 AM
How to Use Mistral OCR for Your Next RAG Model
Mar 21, 2025 am 11:11 AM
Mistral OCR: Revolutionizing Retrieval-Augmented Generation with Multimodal Document Understanding Retrieval-Augmented Generation (RAG) systems have significantly advanced AI capabilities, enabling access to vast data stores for more informed respons
 Top AI Writing Assistants to Boost Your Content Creation
Apr 02, 2025 pm 06:11 PM
Top AI Writing Assistants to Boost Your Content Creation
Apr 02, 2025 pm 06:11 PM
The article discusses top AI writing assistants like Grammarly, Jasper, Copy.ai, Writesonic, and Rytr, focusing on their unique features for content creation. It argues that Jasper excels in SEO optimization, while AI tools help maintain tone consist
 Getting Started With Meta Llama 3.2 - Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
Getting Started With Meta Llama 3.2 - Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
Meta's Llama 3.2: A Leap Forward in Multimodal and Mobile AI Meta recently unveiled Llama 3.2, a significant advancement in AI featuring powerful vision capabilities and lightweight text models optimized for mobile devices. Building on the success o
