
 Technology peripherals
AI
Real-time rendering: dynamic urban scene modeling based on Street Gaussians
Technology peripherals
AI
Real-time rendering: dynamic urban scene modeling based on Street Gaussians
Real-time rendering: dynamic urban scene modeling based on Street Gaussians

To be honest, the speed of technology update is indeed very fast, which has also led to some old methods in academia being gradually replaced by new methods. Recently, a research team from Zhejiang University proposed a new method called Gaussians, which has attracted widespread attention. This method has unique advantages in solving problems and has been successfully used in work. Although Nerf has gradually lost some influence in academia
In order to help players who have not yet passed the level, let’s take a look at the specific methods of solving puzzles in the game.
To help players who have not passed the level yet, we can learn about the specific puzzle solving methods together. To do this, I found a paper on puzzle solving, the link is here: https://arxiv.org/pdf/2401.01339.pdf. You can learn more about puzzle-solving techniques by reading this paper. Hope this helps players!
This paper aims to solve the problem of modeling dynamic urban street scenes from monocular videos. Recent methods have extended NeRF to incorporate tracked vehicle poses into animate vehicles, enabling photorealistic view synthesis of dynamic urban street scenes. However, their significant limitations are slow training and rendering speeds, coupled with the urgent need for high accuracy in tracking vehicle poses. This paper introduces Street Gaussians, a new explicit scene representation that addresses all these limitations. Specifically, dynamic city streets are represented as a set of point clouds equipped with semantic logits and 3D Gaussians, each associated with a foreground vehicle or background.
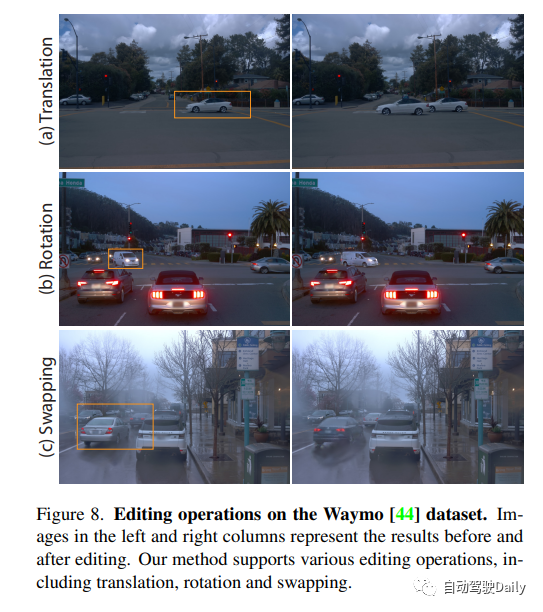
To model the dynamics of foreground object vehicles, each object point cloud can be optimized using optimizable tracking poses as well as dynamic spherical harmonic models of dynamic appearance. This explicit representation allows for simple synthesis of target vehicles and backgrounds, and scene editing operations and rendering at 133 FPS (1066×1600 resolution) within half an hour of training. The researchers evaluated this approach on several challenging benchmarks, including the KITTI and Waymo Open datasets.
Experimental results show that our proposed method consistently outperforms existing techniques on all datasets. Although we rely solely on pose information from off-the-shelf trackers, our representation provides performance comparable to that achieved using real pose information.
In order to help players who have not passed the level yet, I have provided you with a link: https://zju3dv.github.io/streetgaussians/, where you can find specific puzzle solving methods. You can click on the link for reference, I hope it can help you.
Street Gaussians Method Introduction
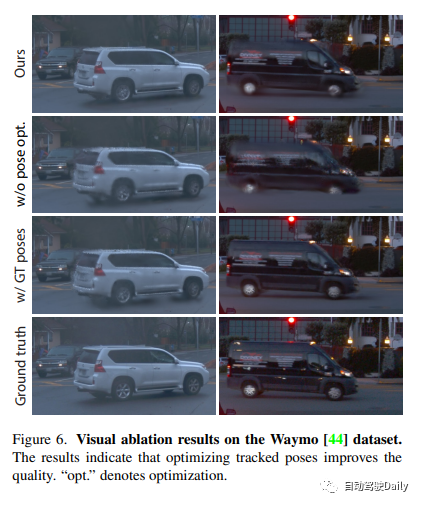
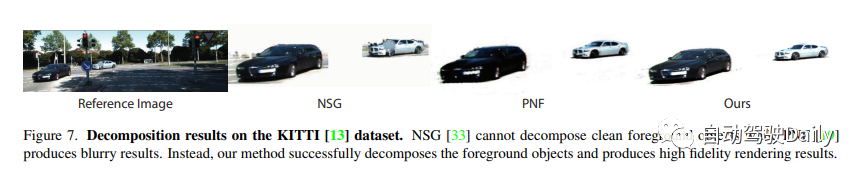
Given a series of images captured from a moving vehicle in an urban street scene, the goal of this paper is to develop a method that can A model that generates photorealistic images from any input time step and any viewpoint. To achieve this goal, a new scene representation, named Street Gaussians, is proposed, specifically designed to represent dynamic street scenes. As shown in Figure 2, the dynamic urban street scene is represented as a set of point clouds, each point cloud corresponding to a static background or a moving vehicle. Explicit point-based representation allows for simple composition of individual models, enabling real-time rendering as well as foreground object decomposition for editing applications. The proposed scene representation can be efficiently trained using only RGB images along with tracked vehicle poses from off-the-shelf trackers, enhanced by our tracked vehicle pose optimization strategy.
Street Gaussians Overview As shown below, dynamic urban street scenes are represented as a set of point-based background and foreground targets with optimized tracked vehicle poses. Each point is assigned a 3D Gaussian including position, opacity and covariance consisting of rotation and scale to represent the geometry. To represent the appearance, each background point is assigned a spherical harmonic model, while the foreground point is associated with a dynamic spherical harmonic model. Explicit point-based representation allows simple combination of separate models, which enables real-time rendering of high-quality images and semantic maps (optional if 2D semantic information is provided during training), as well as decomposition of foreground objects for editing Application

Comparison of Experimental Results
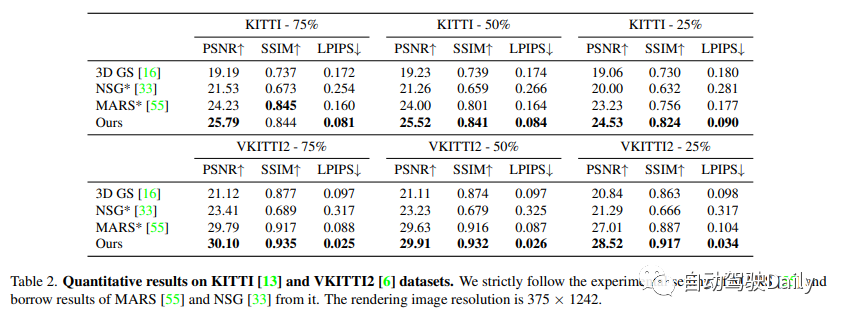
We conducted experiments on the Waymo open dataset and the KITTI benchmark. On the Waymo open data set, 6 recording sequences were selected, which contained a large number of moving objects, significant ego motion, and complex lighting conditions. The length of all sequences is approximately 100 frames, and every 10 images in the sequence are selected as test frames and the remaining images are used for training. When it was found that our baseline method had a high memory cost when training with high-resolution images, the input images were downscaled to 1066×1600. On KITTI and Vitural KITTI 2, the settings of MARS were followed and evaluated using different train/test split settings. Use the bounding boxes generated by the detector and tracker on the Waymo dataset, and use the target trajectory officially provided by KITTI.
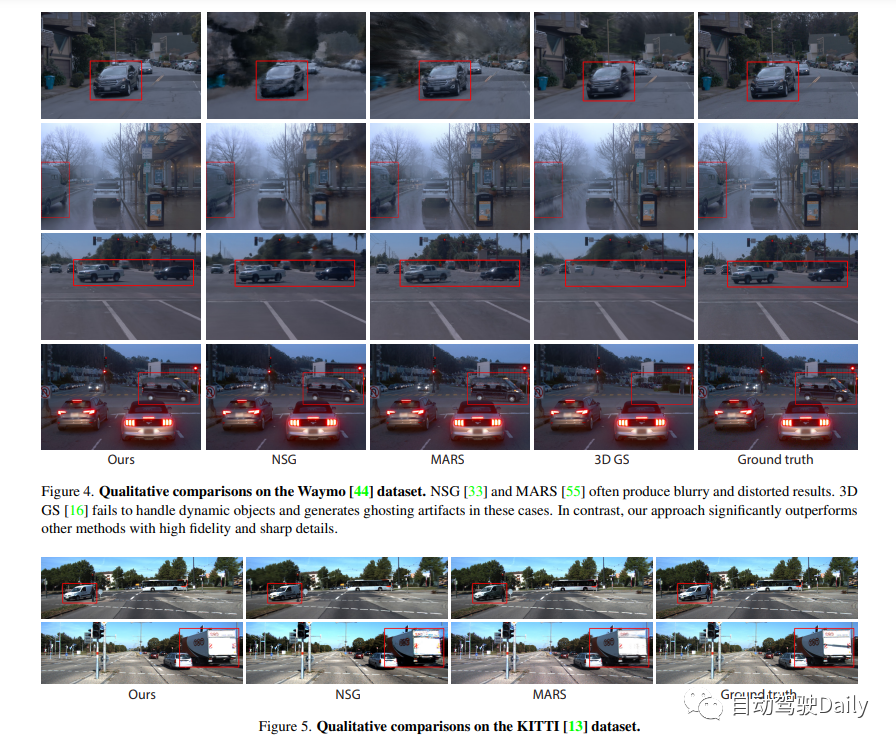
Compare our method with three recent methods.
(1) NSG represents the background as a multi-plane image and uses latent codes learned for each object and shared decoders to model moving objects.
(2) MARS builds the scene graph based on Nerfstudio.
(3) 3D Gaussian uses a set of anisotropic Gaussians to model the scene.
Both NSG and MARS are trained and evaluated using GT boxes, different versions of their implementations are tried here and the best results for each sequence are reported. We also replace SfM point clouds in 3D Gaussian maps with the same input as our method for fair comparison. See supplementary information for details.

The above is the detailed content of Real-time rendering: dynamic urban scene modeling based on Street Gaussians. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1387
1387
 52
52

 How to solve the long tail problem in autonomous driving scenarios?
Jun 02, 2024 pm 02:44 PM
How to solve the long tail problem in autonomous driving scenarios?
Jun 02, 2024 pm 02:44 PM
Yesterday during the interview, I was asked whether I had done any long-tail related questions, so I thought I would give a brief summary. The long-tail problem of autonomous driving refers to edge cases in autonomous vehicles, that is, possible scenarios with a low probability of occurrence. The perceived long-tail problem is one of the main reasons currently limiting the operational design domain of single-vehicle intelligent autonomous vehicles. The underlying architecture and most technical issues of autonomous driving have been solved, and the remaining 5% of long-tail problems have gradually become the key to restricting the development of autonomous driving. These problems include a variety of fragmented scenarios, extreme situations, and unpredictable human behavior. The "long tail" of edge scenarios in autonomous driving refers to edge cases in autonomous vehicles (AVs). Edge cases are possible scenarios with a low probability of occurrence. these rare events
 iOS 17's standby mode turns a charging iPhone into a home hub
Jun 06, 2023 am 08:20 AM
iOS 17's standby mode turns a charging iPhone into a home hub
Jun 06, 2023 am 08:20 AM
In iOS 17 Apple is introducing Standby Mode, a new display experience designed for charging iPhones in a horizontal orientation. In this position, the iPhone is able to display a series of full-screen widgets, turning it into a useful home hub. Standby mode automatically activates on an iPhone running iOS 17 placed horizontally on the charger. You can view time, weather, calendar, music controls, photos, and more. You can swipe left or right through the available standby options and then long press or swipe up/down to customize. For example, you can choose from analog view, digital view, bubble font, and daylight view, where the background color changes based on time as time passes. There are some options
 How to implement editable tables in Vue
Nov 08, 2023 pm 12:51 PM
How to implement editable tables in Vue
Nov 08, 2023 pm 12:51 PM
Tables are an essential component in many web applications. Tables usually have large amounts of data, so tables require some specific features to improve user experience. One of the important features is editability. In this article, we will explore how to implement editable tables using Vue.js and provide specific code examples. Step 1: Prepare the data First, we need to prepare the data for the table. We can use a JSON object to store the table's data and store it in the data property of the Vue instance. In this case
 Understand the differences and comparisons between SpringBoot and SpringMVC
Dec 29, 2023 am 09:20 AM
Understand the differences and comparisons between SpringBoot and SpringMVC
Dec 29, 2023 am 09:20 AM
Compare SpringBoot and SpringMVC and understand their differences. With the continuous development of Java development, the Spring framework has become the first choice for many developers and enterprises. In the Spring ecosystem, SpringBoot and SpringMVC are two very important components. Although they are both based on the Spring framework, there are some differences in functions and usage. This article will focus on comparing SpringBoot and Spring
 How to use CodeIgniter4 framework in php?
May 31, 2023 pm 02:51 PM
How to use CodeIgniter4 framework in php?
May 31, 2023 pm 02:51 PM
PHP is a very popular programming language, and CodeIgniter4 is a commonly used PHP framework. When developing web applications, using frameworks is very helpful. It can speed up the development process, improve code quality, and reduce maintenance costs. This article will introduce how to use the CodeIgniter4 framework. Installing the CodeIgniter4 framework The CodeIgniter4 framework can be downloaded from the official website (https://codeigniter.com/). Down
 Laravel development: How to generate views using Laravel View?
Jun 14, 2023 pm 03:28 PM
Laravel development: How to generate views using Laravel View?
Jun 14, 2023 pm 03:28 PM
Laravel is one of the most popular PHP frameworks currently, and its powerful view generation capabilities are impressive. A view is a page or visual element displayed to the user in a web application, which contains code such as HTML, CSS, and JavaScript. LaravelView allows developers to use a structured template language to build web pages and generate corresponding views through controllers and routing. In this article, we will explore how to generate views using LaravelView. 1. What
 What are the views in Word?
Mar 19, 2024 pm 06:10 PM
What are the views in Word?
Mar 19, 2024 pm 06:10 PM
I guess that many students want to learn the typesetting skills of Word, but the editor secretly tells you that before learning the typesetting skills, you need to understand the word views clearly. In Word2007, 5 views are provided for users to choose. These 5 views include pages. View, reading layout view, web layout view, outline view and normal view, let’s learn about these 5 word views with the editor today. 1. Page view Page view can display the appearance of the print result of the Word2007 document, which mainly includes headers, footers, graphic objects, column settings, page margins and other elements. It is the page view closest to the print result. 2. Reading layout view Reading layout view displays Word2007 documents and Office in the column style of a book
 Have you used these stress testing tools for Linux systems?
Mar 21, 2024 pm 04:12 PM
Have you used these stress testing tools for Linux systems?
Mar 21, 2024 pm 04:12 PM
As an operation and maintenance personnel, have you ever encountered this scenario? You need to use tools to test high system CPU or memory usage to trigger alarms, or test the concurrency capabilities of the service through stress testing. As an operation and maintenance engineer, you can also use these commands to reproduce fault scenarios. Then this article can help you master commonly used testing commands and tools. 1. Introduction In some cases, in order to locate and reproduce problems in the project, tools must be used to conduct systematic stress testing to simulate and restore fault scenarios. At this time testing or stress testing tools become particularly important. Next, we will explore the use of these tools according to different scenarios. 2. Test Tools 2.1 Network speed limiting tool tctc is a command line tool used to adjust network parameters in Linux. It can be used to simulate various networks.
