
 Technology peripherals
AI
General research into autonomous parking, integrating industry standards, trend assessments and system introductions
Technology peripherals
AI
General research into autonomous parking, integrating industry standards, trend assessments and system introductions
General research into autonomous parking, integrating industry standards, trend assessments and system introductions

Written in front
The automatic parking system means that the vehicle can independently find a parking space and complete accurate parking without manual intervention. It can also park according to the user's needs. The requirement is moved to the specified location. The maturity of this technology will greatly alleviate people's inconvenience during the parking process, such as wasting time looking for a parking space for a long time, as well as safety issues such as vehicle collision and friction that may occur when looking for a parking space.
Currently, many technology companies and university laboratories are exploring the field of autonomous parking. Companies such as Mercedes-Benz and Bosch have established parking infrastructure. NVIDIA is developing automatic driving algorithms and parking space detection methods for parking lots. BMW has also installed automatic parking modules on production vehicles.
Considering the widespread demand for automatic parking technology in the industry, we conducted a systematic survey on the development status of automatic parking systems. Including the industry standard trends of automatic parking systems, performance evaluation indicators, technologies designed into each sub-module of the automatic parking system, etc.
Current standard trends in the automatic parking industry
As the current automatic parking system has received widespread attention from industry and academia, various countries and companies are Continuously develop automatic parking technology. Therefore, it is particularly important to formulate standards for automatic parking technology. The technical standards that have been developed include Geographical Information, Outdoor Positioning, Indoor Space Positioning, Parking Standard and Vehicle Communication Standard Several aspects of content, specific standards are summarized in the following table.
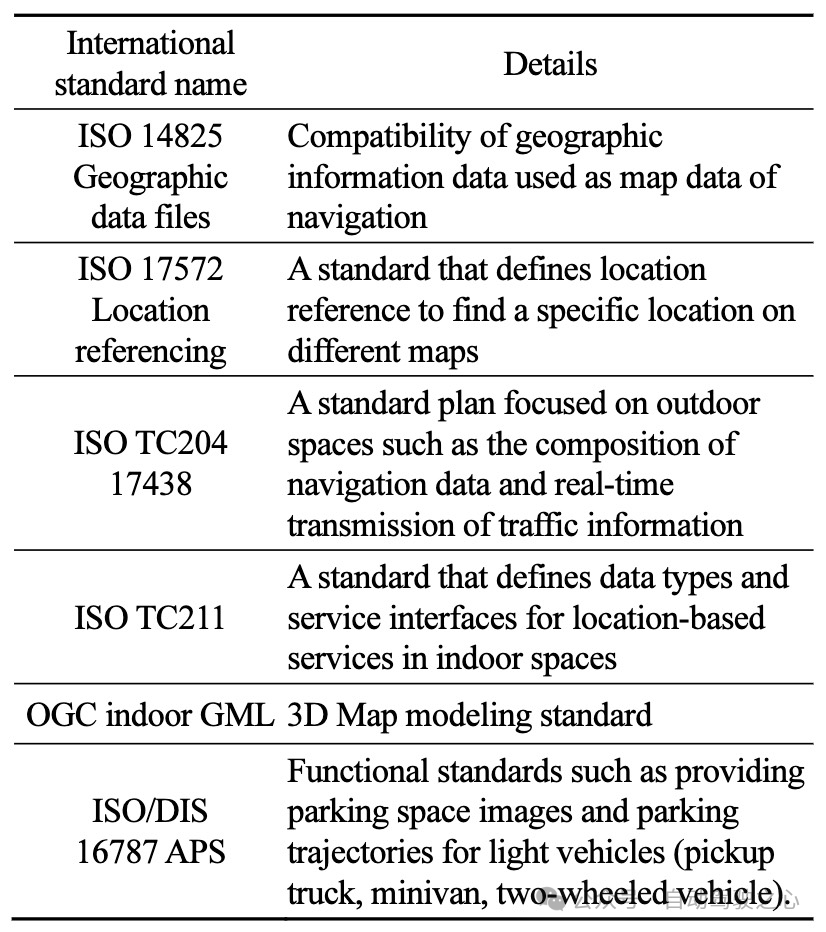
Relevant standards for the automatic parking industry
- Geographic information and positioning standards establish principles and basis for the naming, definition and format of outdoor spaces , Such standards include ISO 14825, ISO 17572 and ISO TC204 177438, etc.
- The standardization of indoor space positioning is also being formulated, including ISO TC211 and OGC standards.
- ISO/DIS 16787 APS parking standard proposes the types of information required for parking and defines the technical name for controlling the vehicle. In addition, the standard defines the functions required to implement an assisted parking system and perform steering control functions of the vehicle.
Evaluation standards for automatic parking systems
The current evaluation of automatic parking systems includes two parts, namely evaluation of the automatic driving part and Review of the automatic parking part.
Evaluation Standards for Autonomous Driving Parts
The evaluation of autonomous driving technology follows the "Autonomous Driving Technology Stage" standards formulated by the Society of Automotive Engineering, which combines autonomous driving technology It is divided into six levels and classified according to technical level, control subject and driving ability. To make it easier to evaluate each level, the ISO/WD 34501 and ISO/WD 34502 standards under development were proposed. The ISO/WD 34501 standard applies to terms and definitions for test scenarios in Level 3 systems, while the ISO/WD 34502 standard provides guidance on test scenarios and a safety assessment process. The formulation of these standards aims to provide unified evaluation criteria for the development and application of autonomous driving technology and promote the development of autonomous driving technology.
Evaluation standards for the automatic parking part
Although automatic parking technology is currently attracting much attention, the formulation of international standards is still in its infancy. Unlike autonomous driving evaluation standards, the technical level of autonomous parking is mainly measured by developers’ evaluation standards.
The following table shows examples of autonomous parking scenarios in the traffic situation scenario system. Parking scenarios are divided according to performance levels.
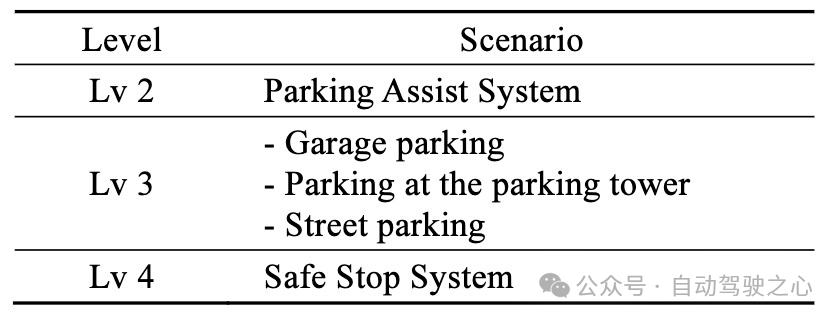
Automatic parking level division
The traffic situation scenario system evaluation includes autonomous driving and parking scenarios, and uses the "automatic parking" defined by the Society of Automotive Engineering. Driving Skills Stage” to point out the ability to self-park. There are currently three levels in the system.
- The second level (Lv2): called the parking assist system is used to help people park more conveniently. At Lv2 level, vehicles are usually equipped with an obstacle distance warning system and a rearview camera.
- The third level (Lv3): Lv3 level can realize automatic parking in specified scenarios. For example, simple parking scenarios such as parking in a garage.
- The fourth level (Lv4): All scenes in Lv3 can be executed at Lv4 level. In addition, when the vehicle encounters an obstacle, the vehicle can return to its destination after stopping or avoiding the obstacle.
Detailed explanation of the automatic parking system
At present, the automatic parking system mainly includes three parts, as shown in the figure below, respectivelySearch Driving process , Automatic parking process and Return to driving process. We first give a general introduction to each process, and then introduce the current development trends of each process.
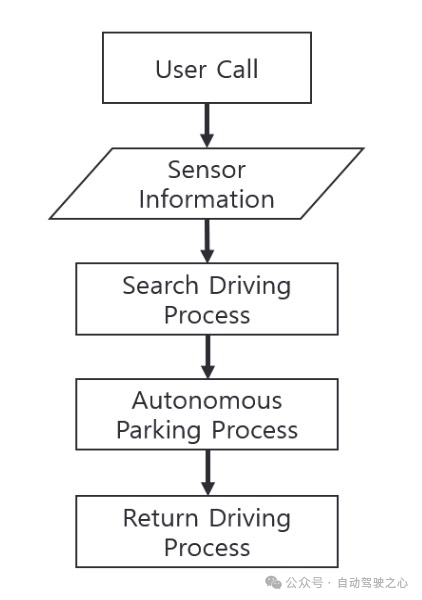
Workflow of the automatic parking system
Search driving process
The ultimate goal of the search driving process is to be in the parking lot The car can find a parking space independently, so the process requires positioning, anti-collision and parking space detection technology.
Introduction to positioning technology
In the automatic parking system, you can use GPS or the IMU sensor that comes with the vehicle to confirm the speed and speed of the vehicle. Attitude and correct the vehicle's position estimation error. However, in some indoor scenes, the GPS signal cannot be received. Therefore, self-driving vehicles need to be equipped with cameras, lidar and millimeter-wave radar for assistance. The picture below is an introduction to some sensor information equipped on the vehicle.
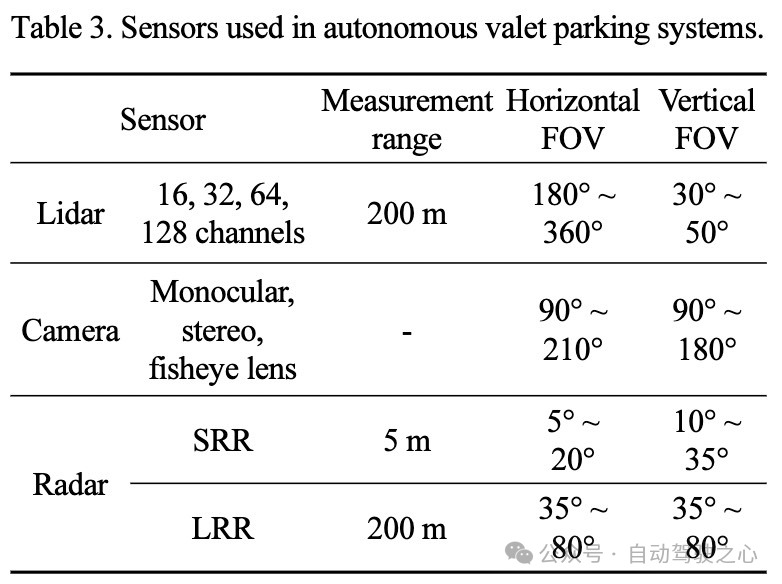
Introduction to sensor information equipped with automatic parking vehicles
- Lidar sensors use laser light to detect objects. The currently popular lidars are mainly divided into 16, 32, 64 and 128 lines of lidars. Its measurement range is approximately 200 meters and its vertical field of view is 30 to 50 degrees.
- Camera sensors can be roughly divided into monocular, binocular and fisheye types. Typically, autonomous vehicles are equipped with cameras with a horizontal field of view of 90 to 210 degrees and a vertical field of view of 90 to 180 degrees.
- Millimeter wave radar can be divided into short-range radar and long-range radar based on distance. Among them, the range of short-range radar is about 5 meters, the horizontal field of view is 5 to 20 degrees, and the vertical field of view is 10 to 35 degrees. The range of long-range radar can be about 200 meters, with a horizontal and vertical field of view of 35 to 80 degrees.
After obtaining the information collected by these different sensors, SLAM mapping technology can be used to reconstruct the environment around the autonomous vehicle, thereby positioning the vehicle. The SLAM mapping technology can be divided into the following two categories: Direct mapping method: tracking the intensity of the data that changes when the sensor moves to estimate the attitude of the sensor. However, because this type of method is easily affected by lighting changes and cannot achieve relocation, current mapping methods are rarely based on this type of method.
- Feature-based mapping method: This method first obtains the feature points of surrounding objects from sensor information. Feature points received from the same object are projected to two different sensor coordinates, and the position of the target is estimated by calculating the geometric relationship of the projected points.
Since the main application scenario of the automatic parking system is in the parking lot, and there will be There are a lot of cars parked, so anti-collision technology is very important. In anti-collision technology, ultrasonic sensors
,short wave radar sensors, lidar sensors and camera sensors are mainly used. Acoustic and radar sensors are mainly used to achieve accurate ranging. Camera sensors mainly use the difference in position of the same object in consecutive images to estimate distance in depth.
Parking space detection technologyParking space detection is continuously performed during the search and driving process, and usually includes traditional computer vision, Deep learning and hybrid implementations of the two methods.
Traditional computer vision mainly specifies and identifies the shape of parking spaces, such as parking space line detection and feature point detection, as shown in the figure below.Example of parking space shape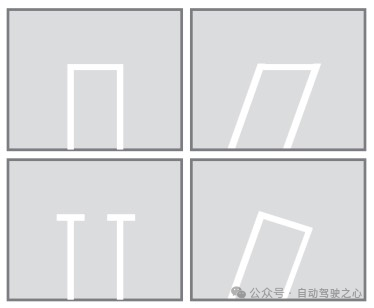
Parking space detection process based on convolutional neural network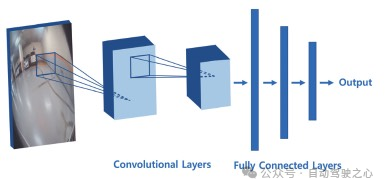
Automatic parking process
If the previous step Once an available parking space has been found during the search driving process, the system calls up the automated parking process. Generally, we use path generation methods to implement the autonomous parking process. Currently, the mainstream path generation methods mainly include algorithm-based methods and reinforcement learning-based methods.
The algorithm-based approach involves calculating the location and shape of the path to the parking space and the current location of the vehicle. In order to calculate a suitable parking path, the algorithm involves algorithms such as optimal control problems, grid-based path planning methods, and rapid exploration of random trees.
Reinforcement learning-based methods can generate optimal paths for autonomous parking processes in autonomous parking simulators. In an autonomous parking simulator, the vehicle learns a common parking procedure. This learning method continuously obtains the optimal path with the highest parking accuracy by repeating the path generation process and evaluation, as shown in the figure below.
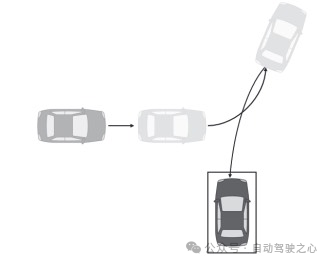
Reverse parking process of automatic parking
Return to driving process
Return to driving process refers to the When the self-driving vehicle enters the parking space and is waiting, the user can call the vehicle to move it to the place designated by the user. In this process, we need to use path tracking technology.
Currently, path tracking technology includes methods of tracking traveling paths and methods of tracking modified paths. However, both methods use similar vehicle control algorithms. For details, please refer to the paper [1-2]. The general idea is to execute the control command to move the vehicle along the generated path, taking into account the vehicle's current position and steering angle conditions.
Conclusion
Due to the current increasing demand for automatic parking technology, various countries and manufacturers are vigorously developing automatic parking systems. Taking into account the rapid development of automatic parking technology, in this article, we summarize the standardization trends, evaluation standards and various components of automatic parking systems in automatic parking systems and introduce them in detail. We hope it can be helpful to everyone. ~

Original link: https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
The above is the detailed content of General research into autonomous parking, integrating industry standards, trend assessments and system introductions. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1386
1386
 52
52

 Detailed introduction to I7-14650HX evaluation and running parameters
Feb 28, 2024 pm 02:00 PM
Detailed introduction to I7-14650HX evaluation and running parameters
Feb 28, 2024 pm 02:00 PM
I7-14650HX is the latest graphics card launched this year. The application capabilities of this graphics card processor are very good, and it has a configuration of 8 large cores and 12 small cores, reaching the highest frequency. Let’s take a look at it together. I7-14650HX evaluation: 1. The specifications of the i7-14650HX processor are 8 large cores + 8 small cores, and its frequency can be as high as 5181MHz in the test. Compared with the existing i7-13650HX, this processor adds 2 large cores, reaching the current core configuration of i7-13700HX, and the frequency has also been improved. 2. The Intel i7-14700HX mobile processor has also been announced. It is now configured with 8 large cores + 12 small cores, and reached a maximum frequency of 5462MHz in the test. 3
 Detailed introduction to I7-14700HX evaluation and running parameters
Feb 26, 2024 pm 04:55 PM
Detailed introduction to I7-14700HX evaluation and running parameters
Feb 26, 2024 pm 04:55 PM
I7-14700HX is a very good and excellent processor. It has a powerful 20-core and 28-thread design to ensure the ultimate game performance. Let’s take a look at the performance of this graphics card. I7-14700HX review: 1. Using Intel7 advanced performance process technology, this product has a powerful design of 20 cores and 28 threads. Theoretically, the maximum core frequency of a single core can reach 5.5GHz, which undoubtedly enhances its multi-tasking and gaming performance. aspects of performance. 2. Equipped with the latest 14th generation Intel Core i7-14700HX processor, which is also based on the Intel7 high-performance process technology platform. 3. The processor adopts the disruptive AdaLovelace architecture and is equipped with
 Introduction to R9-7940HX evaluation and running parameters
Feb 25, 2024 pm 09:16 PM
Introduction to R9-7940HX evaluation and running parameters
Feb 25, 2024 pm 09:16 PM
I recommend you a mysterious processor called Ryzen 97940HX. This is the hero behind the scenes that makes the 7040 product shine. In fact, it can be regarded as a downclocked version of Ryzen 97945HX. If you are interested in its detailed technical information, please refer to the valuable information provided below! R9-7940HX review: 1. Equipped with cutting-edge 5nm process technology and advanced Zen4 CPU architecture, you can also choose to support the trendy PCIe5.0 standard. 2. Although there is still a gap between Ryzen 97940HX and its big brother 7945HX in terms of single-core processing capabilities, it still surpasses the outstanding R97940H processor of the Phoenix platform. 3. This powerful processor has up to 16 cores
 Introduction to I9-14900HX evaluation and running parameters
Feb 25, 2024 pm 04:40 PM
Introduction to I9-14900HX evaluation and running parameters
Feb 25, 2024 pm 04:40 PM
The rather mysterious Intel 14th generation mobile version i9-14900HX processor has quietly appeared, becoming a new peak in the field of notebook computer processors. On this occasion, I believe that many users do not have a comprehensive and in-depth understanding of this outstanding performance central processing unit (CPU), so I would like to provide a detailed and brief introduction to all distinguished users. I9-14900HX review: 1. As the star product in the new 1/i9 series, the highest turbo frequency of 14900HX is expected to jump to an astonishing 5.8GHz, which will undoubtedly once again refresh the world record of processor frequency. 2. In this improvement, Intel has improved the number of cores, thread processing capabilities and cache memory for the new i9-14900HX processor.
 Introduction to R9-7945HX evaluation and running parameters
Feb 25, 2024 pm 04:50 PM
Introduction to R9-7945HX evaluation and running parameters
Feb 25, 2024 pm 04:50 PM
R9-7945HX is undoubtedly an excellent performance CPU created by AMD. It is widely used in various high-end gaming notebooks and high-performance thin and light computer products. So, how does R9-7945HX perform? Next, I will explain it in detail for you. R9-7945HX review: 1. As the star product in the new 1/i9 series, the highest turbo frequency of 14900HX is expected to jump to an astonishing 5.8GHz, which will undoubtedly once again refresh the world record of processor frequency. 2. In this improvement, Intel has achieved significant improvements in the number of cores, thread processing capabilities and cache memory capacity of the new i9-14900HX processor, which has stronger multi-tasking capabilities and
 Detailed introduction to R9-7845HX evaluation and running parameters
Feb 27, 2024 am 09:58 AM
Detailed introduction to R9-7845HX evaluation and running parameters
Feb 27, 2024 am 09:58 AM
R9-7845HX is a very excellent graphics card with a resolution of 2k and supports 240hz refresh. The gaming experience is also very good. Let’s take a look at the detailed evaluation of R9-7845HX. R9-7845HX evaluation: 1. The R97845hx processor has 12 cores, 24 threads, a basic frequency of 3.00GHz, a core frequency of up to 5.20GHz, and a thermal design power consumption (TDP) of 55W. 2. The core display of this processor is AMD Radeon610M, the basic frequency of the graphics card is 0.40GHz, and the acceleration frequency can reach 2.20GHz. 3. Compared with R77735H of ZEN3 architecture, R97845hx has
 Cloud Whale Intelligent Floor Scrubber S1 Experience: It's neither omnipotent nor perfect, but it's really practical!
Jan 12, 2024 pm 01:06 PM
Cloud Whale Intelligent Floor Scrubber S1 Experience: It's neither omnipotent nor perfect, but it's really practical!
Jan 12, 2024 pm 01:06 PM
I don’t know since when, I became less and less lazy about cleaning my home. When I first started working, I would spend more than ten minutes every night when I got home and sweep the dust on the floor, wiping this and that. I felt that only a clean environment would be comfortable to live in. But as time went by, my laziness became stronger and stronger. Not to mention cleaning every day, I was too lazy to pick up the trash when I saw it on the ground. As time went by, my room became more and more messy, and I was scolded by the landlord for this. several times. Just when I was struggling with the problem of whether to sweep or not to sweep, Lei Technology suddenly received a new product from Cloud Whale-Cloud Whale Intelligent Floor Scrubber S1. As the person who needs this type of product most in the company, of course I immediately bought it. I brought it home and after using it for three days, I decided to temporarily "requisition" it for a while. Small enough and doesn’t take up much space, enough
 Detailed introduction to I7-13700HX evaluation and running parameters
Feb 26, 2024 pm 04:50 PM
Detailed introduction to I7-13700HX evaluation and running parameters
Feb 26, 2024 pm 04:50 PM
I7-13700HX is the latest Intel processor and uses an improved hardware thread scheduler. It is very friendly to players who have better requirements for game performance. Let’s take a look at the specific contents of this processor. I7-13700HX review 1. The performance of this processor far exceeds that of the H-series standard processors, including the latest i9-13900H, and even the most common i7-12700H in the previous generation cannot match it. 2. Its multi-core score is 20682, and its single-core score is 1894. Compared with i7-12700H, multi-core performance is improved by about 35% and single-core performance is improved by about 25%, which is a significant improvement. 3. From the data point of view, i7-13700H can release 2069-2456cb
