
 Computer Tutorials
Computer Knowledge
Detailed explanation of a definite integral problem about inverse trigonometric functions
Computer Tutorials
Computer Knowledge
Detailed explanation of a definite integral problem about inverse trigonometric functions
Detailed explanation of a definite integral problem about inverse trigonometric functions

A question about the definite integral of an inverse trigonometric function is troublesome with detailed procedures
∫ (arcsinx)² dx
= x(arcsinx)² - ∫ x d(arcsinx)²
= x(arcsinx)² - ∫ x • 2(arcsinx) • 1/√(1 - x²) • dx
= x(arcsinx)² - 2∫ x(arcsinx)/√(1 - x²) dx
= x(arcsinx)² - 2∫ arcsinx d[-√(1 - x²)]
= x(arcsinx)² 2(arcsinx)√(1 - x²) - 2∫ √(1 - x²) d(arcsinx)
= x(arcsinx)² 2(arcsinx)√ (1 - x²) - 2∫ √ (1 - x²)/√ (1 - x²) dx
= x(arcsinx)² 2(arcsinx)√(1 - x²) - 2x C
This is an indefinite integral
Just substitute the fixed points
Original function of inverse trigonometric function
Use the integral method to get:
I = ∫ arcsinx dx = x arcsinx - ∫ [x/√(1-x^2)] dx
= x arcsinx (1/2) ∫ [1/√(1-x^2)] d(1-x^2) = x arcsinx √(1-x^2) C
I = ∫ arccosx dx = x arccosx ∫ [x/√(1-x^2)] dx
= x arccosx - (1/2) ∫ [1/√(1-x^2)] d(1-x^2) = x arccosx - √(1-x^2) C
I = ∫ arctanx dx = x arctanx - ∫ [x/(1 x^2)] dx
= x arctanx - (1/2) ∫ [1/(1 x^2)] d(1 x^2) = x arctanx - (1/2)ln(1 x^2) C
It is the general name of arcsine arcsin x, arccosine arccos x, arctangent arctan x, arccotangent arccot x, arcsec arcsec x, arccscc x, each of which represents its arcsine, arccosine, Inverse tangent, inverse cotangent, inverse secant, and inverse cosecant are the angles of x.
Extended information:
It is best for the function to be continuous in this interval (the reason why it is said to be best here is because the inverse secant and inverse cosecant functions are sharp); in order to facilitate research, it is often necessary to select the interval from 0 to π/ 2 corners.
The function value domain on the determined interval should be the same as the domain of the entire function. The inverse trigonometric function determined in this way is single-valued. In order to distinguish it from the multi-valued inverse trigonometric function above, the A in Arc is often changed to a in notation. For example, the single-valued inverse sine function is recorded as arcsin x.
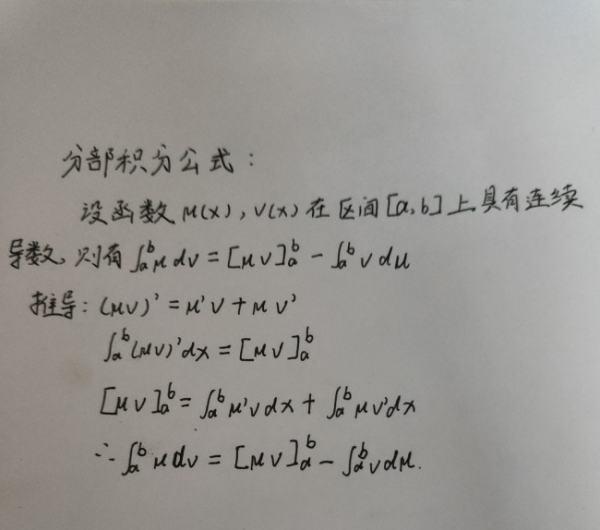
To limit the inverse trigonometric function to a single-valued function, limit the value y of the inverse sine function to -π/2≤y≤π/2, and use y as the principal value of the inverse sine function, recorded as y=arcsin x; Correspondingly, the principal value of the inverse cosine function y=arccos x is limited to 0≤y≤π; the principal value of the arctangent function y=arctan x is limited to -π/2 Reference source: Encyclopedia - Inverse Trigonometric Functions . If the integral interval is symmetric, first check whether there is an odd function in the formula. For example, the square expansion of this question is: 1 2x(1-x^2)^1/2. Note that 2x(1-x^2)^ 1/2 is an odd function, so its integral in the symmetric interval is 0, leaving only "1", so the result is 2 2. When arctan, ln and the like appear, you must find a way to make derivatives of them, x*arctanx. If you want to make derivatives of arctanx, you must use integrals by parts: Put x at the back, the original integral formula becomes: 1/2arctanx d(x^2), the integral formula of the second half of the integral by parts is (x^2)/(1 x^2), this should It will accumulate, the key is to know how to guide arctan The result of this question is: 1/2(x^2*arctanx - x arctanx C) As long as you do more questions here, you will get the idea. The real difficulty lies in the multiple integrals and surface curve integrals, which can be said to be abnormal The integral-by-parts formula is a very important formula. With it, the formula can be used to quickly solve some integral problems. At the same time, the answer can also be solved when some integrand functions cannot directly find the original function. Extended information: 1. The integral method by parts is an important and basic method for calculating integrals in calculus. 2. It is derived from the multiplication rule of differential calculus and the fundamental theorem of calculus. Its main principle is to transform the integral form that is not easy to produce direct results into an equivalent integral form that is easy to produce results. 3. According to the basic function types that make up the integrand, the order of commonly used integrals by parts is organized into a formula: "Anti-power refers to three". They respectively refer to five types of basic functions: inverse trigonometric functions, logarithmic functions, power functions, exponential functions, and integrals of trigonometric functions. 4. Formula (1) of indefinite integral, ∫ a dx = ax C, a and C are constants (2), ∫ x^a dx = [x^(a 1)]/(a 1) C, where a is a constant and a ≠ -1 (3), ∫ 1/x dx = ln|x| (4), ∫ a^x dx = (1/lna)a^x C, where a > 0 and a ≠ (5), ∫ e^x dx = e^x C (6), ∫ cosx dx = sinx (7), ∫ sinx dx = - cosx C (8), ∫ cotx dx = ln|sinx| C = - ln|cscx| C 5. Method of indefinite integral: The first type of substitution is actually a kind of patchwork, using f'(x)dx=df(x); and the rest of the previous ones are just functions about f(x), and then look at f(x) To achieve the final result as a whole. Integral by parts, there are only a few fixed types, which are nothing more than trigonometric functions multiplied by x, or exponential functions or logarithmic functions multiplied by an x. The memory method is to use the f mentioned above '(x)dx=df(x) deform, and then use the formula ∫xdf(x)=f(x)x-∫f(x)dx. Of course, x can be replaced by other g(x). Reference: Encyclopedia: Integration by PartsHow to prove the indefinite integral of an inverse trigonometric function
Derivation of integral formula by parts
The above is the detailed content of Detailed explanation of a definite integral problem about inverse trigonometric functions. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1387
1387
 52
52

 How do I edit the Registry? (Warning: Use with caution!)
Mar 21, 2025 pm 07:46 PM
How do I edit the Registry? (Warning: Use with caution!)
Mar 21, 2025 pm 07:46 PM
Article discusses editing Windows Registry, precautions, backup methods, and potential issues from incorrect edits. Main issue: risks of system instability and data loss from improper changes.
 How do I manage services in Windows?
Mar 21, 2025 pm 07:52 PM
How do I manage services in Windows?
Mar 21, 2025 pm 07:52 PM
Article discusses managing Windows services for system health, including starting, stopping, restarting services, and best practices for stability.
 How to Fix the Steam Cloud Error? Try These Methods
Apr 04, 2025 am 01:51 AM
How to Fix the Steam Cloud Error? Try These Methods
Apr 04, 2025 am 01:51 AM
The Steam Cloud error can be caused by many reasons. To play a game smoothly, you need to take some measures to remove this error before you launch the game. php.cn Software introduces some best ways as well as more useful information in this post.
 Windows Metadata and Internet Services Problem: How to Fix It?
Apr 02, 2025 pm 03:57 PM
Windows Metadata and Internet Services Problem: How to Fix It?
Apr 02, 2025 pm 03:57 PM
You may see the “A connection to the Windows Metadata and Internet Services (WMIS) could not be established.” error on Event Viewer. This post from php.cn introduces how to remove the Windows Metadata and Internet Services problem.
 How do I change the default app for a file type?
Mar 21, 2025 pm 07:48 PM
How do I change the default app for a file type?
Mar 21, 2025 pm 07:48 PM
Article discusses changing default apps for file types on Windows, including reverting and bulk changes. Main issue: no built-in bulk change option.
 How to Resolve the KB5035942 Update Issues – Crashing System
Apr 02, 2025 pm 04:16 PM
How to Resolve the KB5035942 Update Issues – Crashing System
Apr 02, 2025 pm 04:16 PM
KB5035942 update issues - crashing system commonly happens to users. Inflicted people hope to find a way out of the kind of trouble, such as crashing system, installation, or sound issues. Targeting these situations, this post published by php.cn wil
 How do I use the Group Policy Editor (gpedit.msc)?
Mar 21, 2025 pm 07:48 PM
How do I use the Group Policy Editor (gpedit.msc)?
Mar 21, 2025 pm 07:48 PM
The article explains how to use the Group Policy Editor (gpedit.msc) in Windows for managing system settings, highlighting common configurations and troubleshooting methods. It notes that gpedit.msc is unavailable in Windows Home editions, suggesting
 How to Use Chris Titus Tool to Create a Debloated Win11/10 ISO
Apr 01, 2025 am 03:15 AM
How to Use Chris Titus Tool to Create a Debloated Win11/10 ISO
Apr 01, 2025 am 03:15 AM
Chris Titus Tech has a tool called Windows Utility that can help you easily create a debloated Windows 11/10 ISO to install a clean system. php.cn offers a full guide on how to do this thing using the Chris Titus tool.
