
 Technology peripherals
AI
UniVision introduces a new generation of unified framework: BEV detection and Occupancy dual tasks reach the most advanced level!
Technology peripherals
AI
UniVision introduces a new generation of unified framework: BEV detection and Occupancy dual tasks reach the most advanced level!
UniVision introduces a new generation of unified framework: BEV detection and Occupancy dual tasks reach the most advanced level!

Written in front&Personal understanding
In recent years, vision-centered 3D perception in autonomous driving technology has developed rapidly. Although 3D perception models are structurally and conceptually similar, there are still gaps in feature representation, data formats, and objectives, which poses a challenge to design a unified and efficient 3D perception framework. Therefore, researchers need to work hard to address these gaps to achieve more accurate and reliable autonomous driving systems. Through collaboration and innovation, we hope to further improve the safety and performance of autonomous driving.
Especially for detection tasks and Occupancy tasks under BEV, it is very difficult to achieve joint training and achieve good results. This brings great troubles to many applications due to instability and effects that are difficult to control. However, UniVision is a simple and efficient framework that unifies the two main tasks of vision-centric 3D perception, namely occupancy prediction and object detection. The core of the framework is an explicit-implicit view transformation module for complementary 2D-3D feature transformation. In addition, UniVision also proposes a local global feature extraction and fusion module for efficient and adaptive voxel and BEV feature extraction, enhancement, and interaction. By adopting these methods, UniVision is able to achieve satisfactory results in detection tasks and Occupancy tasks under BEV.
UniVision proposes a joint occupancy detection data enhancement strategy and a progressive loss weight adjustment strategy to improve the efficiency and stability of multi-task framework training. Extensive experiments are conducted on four public benchmarks, including scene-free lidar segmentation, scene-free detection, OpenOccupancy and Occ3D. Experimental results show that UniVision achieved gains of 1.5 mIoU, 1.8 NDS, 1.5 mIoU and 1.8 mIoU on each benchmark respectively, reaching the SOTA level. Therefore, the UniVision framework can serve as a high-performance baseline for unified vision-centric 3D perception tasks.
The current state of the field of 3D perception
3D perception is the primary task of autonomous driving systems, which aims to utilize a series of sensors (such as lidar, radar and cameras) The data obtained can be used to comprehensively understand the driving scene and be used for subsequent planning and decision-making. In the past, the field of 3D perception has been dominated by lidar-based models due to the precise 3D information derived from point cloud data. However, lidar-based systems are costly, susceptible to severe weather, and inconvenient to deploy. In contrast, vision-based systems have many advantages, such as low cost, easy deployment, and good scalability. Therefore, vision-centered three-dimensional perception has attracted widespread attention from researchers.
Recently, vision-based 3D detection has made significant progress through improved feature representation transformation, temporal fusion, and supervision signal design, and the gap with LiDAR-based models continues to narrow. In addition, vision-based occupancy tasks have also developed rapidly in recent years. Unlike using 3D boxes to represent objects, occupancy can describe the geometric and semantic characteristics of the driving scene more comprehensively and is not limited by object shape and category.
Although detection methods and occupancy methods share structural and conceptual similarities, there is insufficient research on handling these two tasks simultaneously and exploring their interrelationships. Occupancy models and detection models usually extract different feature representations. The occupancy prediction task requires exhaustive semantic and geometric judgments, so voxel representations are widely used to preserve fine-grained 3D information. However, in detection tasks, BEV representation is more preferable since most objects lie on the same horizontal plane with smaller overlap.
Compared with BEV representation, voxel representation is higher in fineness, but less efficient. In addition, many advanced operators are mainly designed and optimized for 2D features, making their integration with 3D voxel representation not so simple. BEV representation is more advantageous in terms of time efficiency and memory efficiency, but it is suboptimal for dense spatial prediction because structural information is lost in the height dimension. In addition to feature representation, different perception tasks also differ in data formats and goals. Therefore, ensuring the uniformity and efficiency of training multi-task 3D perception frameworks is a huge challenge.
UniVision Network Structure
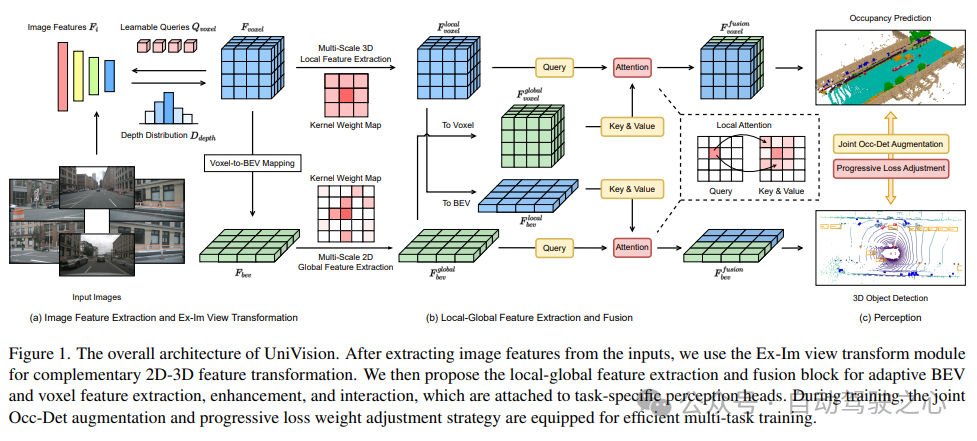
The overall architecture of the UniVision framework is shown in Figure 1. The framework receives multi-view images from surrounding N cameras as input and extracts image features through an image feature extraction network. Next, the Ex-Im view transformation module is used to convert 2D image features into 3D voxel features. This module combines depth-guided explicit feature boosting and query-guided implicit feature sampling. After view transformation, the voxel features are fed into the local global feature extraction and fusion block to extract local context-aware voxel features and global context-aware BEV features respectively. Next, information is exchanged on voxel features and BEV features for different downstream perception tasks through the cross-representation feature interaction module. During the training process, the UniVision framework uses combined Occ-Det data enhancement and progressive loss weight adjustment strategies for effective training. These strategies can improve the training effect and generalization ability of the framework. In short, the UniVision framework realizes the task of sensing the surrounding environment through the processing of multi-view images and 3D voxel features, as well as the application of feature interaction modules. At the same time, through the application of data enhancement and loss weight adjustment strategies, the training effect of the framework is effectively improved.
1) Ex-Im View Transform
Depth-oriented explicit feature enhancement. The LSS approach is followed here:

#2) Query-guided implicit feature sampling. However, there are some drawbacks in representing 3D information. The accuracy of is highly correlated with the accuracy of the estimated depth distribution. Furthermore, the points generated by LSS are not evenly distributed. Points are densely packed near the camera and sparse at distance. Therefore, we further use query-guided feature sampling to compensate for the above shortcomings.
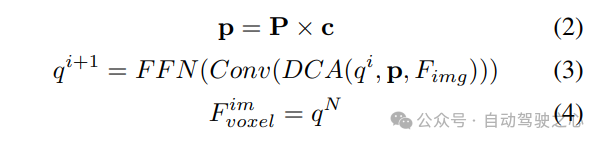
Compared to points generated from LSS, voxel queries are uniformly distributed in 3D space, and they are learned from the statistical properties of all training samples, which is consistent with The depth prior information used in LSS is irrelevant. Therefore, and complement each other, connect them as the output features of the view transformation module:

2) Local and global feature extraction and fusion
Given input voxel features, first overlay the features on the Z-axis and use convolutional layers to reduce channels to obtain BEV features:

Then, The model is divided into two parallel branches for feature extraction and enhancement. Local feature extraction, global feature extraction, and the final cross-representation feature interaction! As shown in Figure 1(b).
3) Loss function and detection head




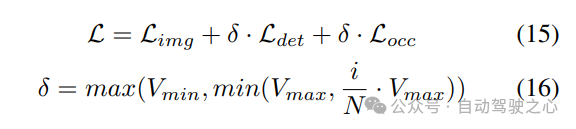
Progressive loss weight adjustment strategy. In practice, it is found that directly incorporating the above losses often causes the training process to fail and the network to fail to converge. In the early stages of training, voxel features Fvoxel are randomly distributed, and supervision in the occupancy head and detection head contributes less than other losses in convergence. At the same time, loss items such as the classification loss Lcls in the detection task are very large and dominate the training process, making it difficult to optimize the model. To overcome this problem, a progressive loss weight adjustment strategy is proposed to dynamically adjust the loss weight. Specifically, the control parameter δ is added to the non-image-level losses (i.e., occupancy loss and detection loss) to adjust the loss weight in different training epochs. The control weight δ is set to a small value Vmin at the beginning and gradually increases to Vmax over N training epochs:
4) Combined with Occ-Det spatial data enhancement
In 3D detection tasks, in addition to common image-level data enhancement, spatial-level data enhancement is also effective in improving model performance. Effective. However, applying spatial level enhancement in occupancy tasks is not straightforward. When we apply data augmentation (such as random scaling and rotation) to discrete occupancy labels, it is difficult to determine the resulting voxel semantics. Therefore, existing methods only apply simple spatial augmentation such as random flipping in occupancy tasks.
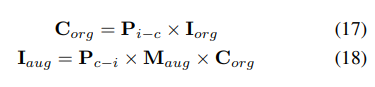
To solve this problem, UniVision proposes a joint Occ-Det spatial data enhancement to allow simultaneous enhancement of 3D detection tasks and occupancy tasks in the framework. Since the 3D box labels are continuous values and the enhanced 3D box can be directly calculated for training, the enhancement method in BEVDet is followed for detection. Although occupancy labels are discrete and difficult to manipulate, voxel features can be treated as continuous and can be processed through operations such as sampling and interpolation. It is therefore recommended to transform voxel features instead of directly operating on occupancy labels for data augmentation.
Specifically, spatial data augmentation is first sampled and the corresponding 3D transformation matrix is calculated. For the occupancy labels and their voxel indices , we calculate their three-dimensional coordinates. Then, apply and normalize it to obtain the voxel indices in the enhanced voxel feature :
Experiment Comparison of results
Used multiple data sets for verification, NuScenes LiDAR Segmentation, NuScenes 3D Object Detection, OpenOccupancy and Occ3D.
NuScenes LiDAR Segmentation: According to the recent OccFormer and TPVFormer, camera images are used as input for the lidar segmentation task, and the lidar data is only used to provide 3D locations for querying the output features. Use mIoU as the evaluation metric.
NuScenes 3D Object Detection: For detection tasks, use the official metric of nuScenes, the nuScene Detection Score (NDS), which is the weighted sum of average mAP and several metrics, including average translation error (ATE), average Scale Error (ASE), Average Orientation Error (AOE), Average Velocity Error (AVE) and Average Attribute Error (AAE).
OpenOccupancy: The OpenOccupancy benchmark is based on the nuScenes dataset and provides semantic occupancy labels at 512×512×40 resolution. The labeled classes are the same as those in the lidar segmentation task, using mIoU as the evaluation metric!
Occ3D: The Occ3D benchmark is based on the nuScenes dataset and provides semantic occupancy labels at 200×200×16 resolution. Occ3D further provides visible masks for training and evaluation. The labeled classes are the same as those in the lidar segmentation task, using mIoU as the evaluation metric!
1) Nuscenes LiDAR segmentation
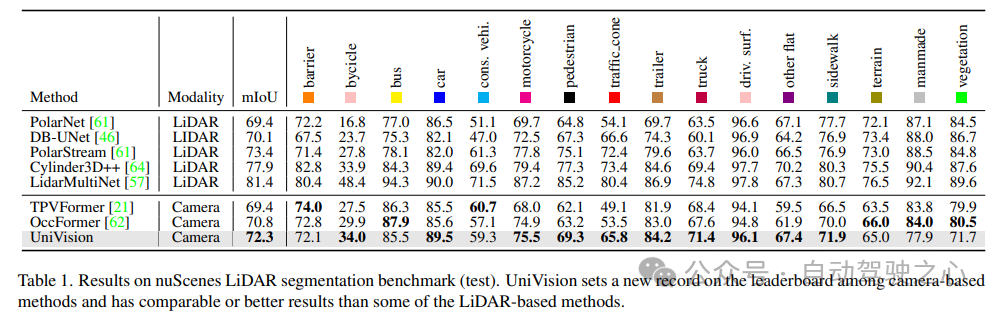
Table 1 shows the results of the nuScenes LiDAR segmentation benchmark. UniVision significantly outperforms the state-of-the-art vision-based method OccFormer by 1.5% mIoU and sets a new record for vision-based models on the leaderboard. Notably, UniVision also outperforms some lidar-based models such as PolarNe and DB-UNet.
2) NuScenes 3D object detection task
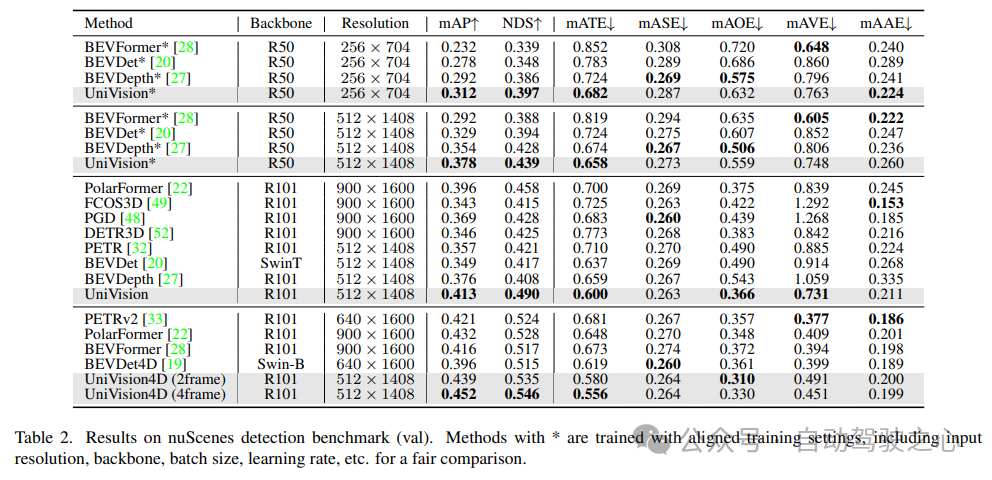
As shown in Table 2, when using the same training settings for fair comparison , UniVision was shown to outperform other methods. Compared with BEVDepth at 512×1408 image resolution, UniVision achieves gains of 2.4% and 1.1% in mAP and NDS respectively. When the model is scaled up and UniVision is combined with temporal input, it further outperforms SOTA-based temporal detectors by significant margins. UniVision achieves this with a smaller input resolution, and it does not use CBGS.
3) Comparison of OpenOccupancy results
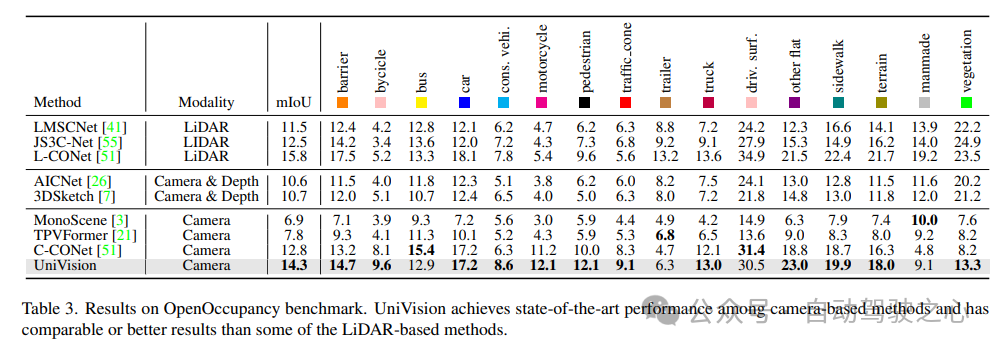
The results of the OpenOccupancy benchmark test are shown in Table 3. UniVision significantly outperforms recent vision-based occupancy methods including MonoScene, TPVFormer, and C-CONet in terms of mIoU by 7.3%, 6.5%, and 1.5%, respectively. Furthermore, UniVision outperforms some lidar-based methods such as LMSCNet and JS3C-Net.
4) Occ3D experimental results
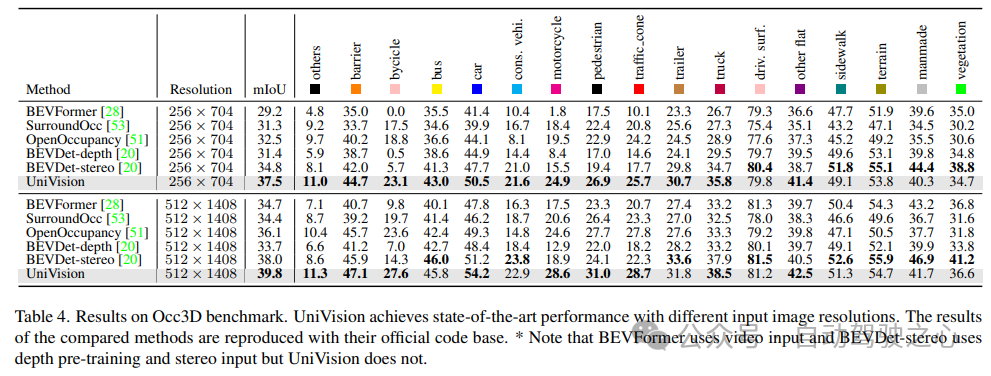
Table 4 lists the results of the Occ3D benchmark test. UniVision significantly outperforms recent vision-based methods in terms of mIoU under different input image resolutions, by more than 2.7% and 1.8% respectively. It is worth noting that BEVFormer and BEVDet-stereo load pre-trained weights and use temporal inputs in inference, while UniVision does not use them but still achieves better performance.
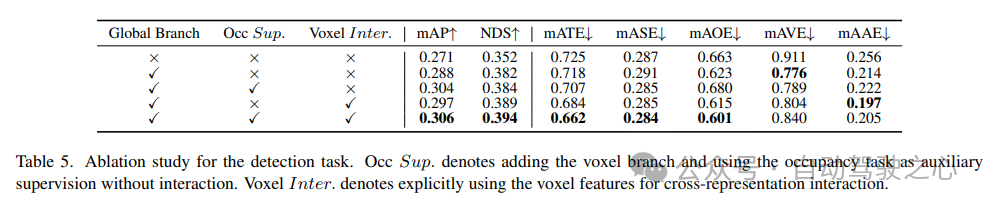
#5) Effectiveness of components in detection tasks
Ablation studies for detection tasks are shown in Table 5. When the BEV-based global feature extraction branch is inserted into the baseline model, the performance improves by 1.7% mAP and 3.0% NDS. When the voxel-based occupancy task is added to the detector as an auxiliary task, the model’s mAP gain increases by 1.6%. When cross-representation interactions are explicitly introduced from voxel features, the model achieves the best performance, improving mAP and NDS by 3.5% and 4.2%, respectively, compared to the baseline;
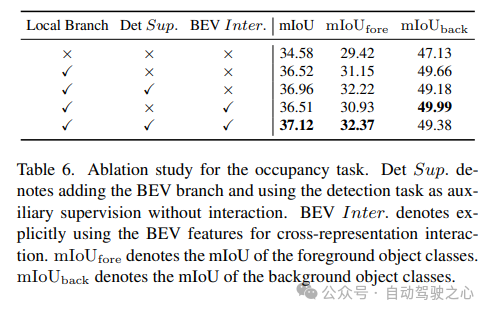
6) Effectiveness of components in the occupancy task
Ablation studies for the occupancy task are shown in Table 6. The voxel-based local feature extraction network brings an improvement of 1.96% mIoU gain to the baseline model. When the detection task is introduced as an auxiliary supervision signal, the model performance improves by 0.4% mIoU.
7) Others
Table 5 and Table 6 show that in the UniVision framework, detection tasks and occupancy tasks complement each other of. For detection tasks, occupancy supervision can improve mAP and mATE metrics, indicating that voxel semantic learning effectively improves the detector's perception of object geometry, i.e., centrality and scale. For the occupancy task, detection supervision significantly improves the performance of the foreground category (i.e., the detection category), resulting in an overall improvement.
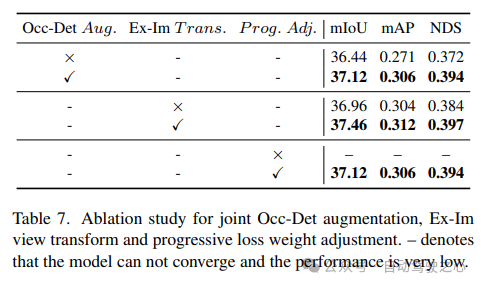
The effectiveness of the combined Occ-Det spatial enhancement, Ex-Im view conversion module and progressive loss weight adjustment strategy is shown in Table 7. With the proposed spatial augmentation and the proposed view transformation module, it shows significant improvements in detection tasks and occupancy tasks on mIoU, mAP and NDS metrics. The loss weight adjustment strategy can effectively train the multi-task framework. Without this, the training of the unified framework cannot converge and the performance is very low.
Original link: https://mp.weixin.qq.com/s/8jpS_I-wn1-svR3UlCF7KQ
The above is the detailed content of UniVision introduces a new generation of unified framework: BEV detection and Occupancy dual tasks reach the most advanced level!. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1382
1382
 52
52

 Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
Open source! Beyond ZoeDepth! DepthFM: Fast and accurate monocular depth estimation!
Apr 03, 2024 pm 12:04 PM
0.What does this article do? We propose DepthFM: a versatile and fast state-of-the-art generative monocular depth estimation model. In addition to traditional depth estimation tasks, DepthFM also demonstrates state-of-the-art capabilities in downstream tasks such as depth inpainting. DepthFM is efficient and can synthesize depth maps within a few inference steps. Let’s read about this work together ~ 1. Paper information title: DepthFM: FastMonocularDepthEstimationwithFlowMatching Author: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
The world's most powerful open source MoE model is here, with Chinese capabilities comparable to GPT-4, and the price is only nearly one percent of GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Imagine an artificial intelligence model that not only has the ability to surpass traditional computing, but also achieves more efficient performance at a lower cost. This is not science fiction, DeepSeek-V2[1], the world’s most powerful open source MoE model is here. DeepSeek-V2 is a powerful mixture of experts (MoE) language model with the characteristics of economical training and efficient inference. It consists of 236B parameters, 21B of which are used to activate each marker. Compared with DeepSeek67B, DeepSeek-V2 has stronger performance, while saving 42.5% of training costs, reducing KV cache by 93.3%, and increasing the maximum generation throughput to 5.76 times. DeepSeek is a company exploring general artificial intelligence
 AI subverts mathematical research! Fields Medal winner and Chinese-American mathematician led 11 top-ranked papers | Liked by Terence Tao
Apr 09, 2024 am 11:52 AM
AI subverts mathematical research! Fields Medal winner and Chinese-American mathematician led 11 top-ranked papers | Liked by Terence Tao
Apr 09, 2024 am 11:52 AM
AI is indeed changing mathematics. Recently, Tao Zhexuan, who has been paying close attention to this issue, forwarded the latest issue of "Bulletin of the American Mathematical Society" (Bulletin of the American Mathematical Society). Focusing on the topic "Will machines change mathematics?", many mathematicians expressed their opinions. The whole process was full of sparks, hardcore and exciting. The author has a strong lineup, including Fields Medal winner Akshay Venkatesh, Chinese mathematician Zheng Lejun, NYU computer scientist Ernest Davis and many other well-known scholars in the industry. The world of AI has changed dramatically. You know, many of these articles were submitted a year ago.
 Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Hello, electric Atlas! Boston Dynamics robot comes back to life, 180-degree weird moves scare Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas officially enters the era of electric robots! Yesterday, the hydraulic Atlas just "tearfully" withdrew from the stage of history. Today, Boston Dynamics announced that the electric Atlas is on the job. It seems that in the field of commercial humanoid robots, Boston Dynamics is determined to compete with Tesla. After the new video was released, it had already been viewed by more than one million people in just ten hours. The old people leave and new roles appear. This is a historical necessity. There is no doubt that this year is the explosive year of humanoid robots. Netizens commented: The advancement of robots has made this year's opening ceremony look like a human, and the degree of freedom is far greater than that of humans. But is this really not a horror movie? At the beginning of the video, Atlas is lying calmly on the ground, seemingly on his back. What follows is jaw-dropping
 Slow Cellular Data Internet Speeds on iPhone: Fixes
May 03, 2024 pm 09:01 PM
Slow Cellular Data Internet Speeds on iPhone: Fixes
May 03, 2024 pm 09:01 PM
Facing lag, slow mobile data connection on iPhone? Typically, the strength of cellular internet on your phone depends on several factors such as region, cellular network type, roaming type, etc. There are some things you can do to get a faster, more reliable cellular Internet connection. Fix 1 – Force Restart iPhone Sometimes, force restarting your device just resets a lot of things, including the cellular connection. Step 1 – Just press the volume up key once and release. Next, press the Volume Down key and release it again. Step 2 – The next part of the process is to hold the button on the right side. Let the iPhone finish restarting. Enable cellular data and check network speed. Check again Fix 2 – Change data mode While 5G offers better network speeds, it works better when the signal is weaker
 KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
KAN, which replaces MLP, has been extended to convolution by open source projects
Jun 01, 2024 pm 10:03 PM
Earlier this month, researchers from MIT and other institutions proposed a very promising alternative to MLP - KAN. KAN outperforms MLP in terms of accuracy and interpretability. And it can outperform MLP running with a larger number of parameters with a very small number of parameters. For example, the authors stated that they used KAN to reproduce DeepMind's results with a smaller network and a higher degree of automation. Specifically, DeepMind's MLP has about 300,000 parameters, while KAN only has about 200 parameters. KAN has a strong mathematical foundation like MLP. MLP is based on the universal approximation theorem, while KAN is based on the Kolmogorov-Arnold representation theorem. As shown in the figure below, KAN has
 The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
The vitality of super intelligence awakens! But with the arrival of self-updating AI, mothers no longer have to worry about data bottlenecks
Apr 29, 2024 pm 06:55 PM
I cry to death. The world is madly building big models. The data on the Internet is not enough. It is not enough at all. The training model looks like "The Hunger Games", and AI researchers around the world are worrying about how to feed these data voracious eaters. This problem is particularly prominent in multi-modal tasks. At a time when nothing could be done, a start-up team from the Department of Renmin University of China used its own new model to become the first in China to make "model-generated data feed itself" a reality. Moreover, it is a two-pronged approach on the understanding side and the generation side. Both sides can generate high-quality, multi-modal new data and provide data feedback to the model itself. What is a model? Awaker 1.0, a large multi-modal model that just appeared on the Zhongguancun Forum. Who is the team? Sophon engine. Founded by Gao Yizhao, a doctoral student at Renmin University’s Hillhouse School of Artificial Intelligence.
 Tesla robots work in factories, Musk: The degree of freedom of hands will reach 22 this year!
May 06, 2024 pm 04:13 PM
Tesla robots work in factories, Musk: The degree of freedom of hands will reach 22 this year!
May 06, 2024 pm 04:13 PM
The latest video of Tesla's robot Optimus is released, and it can already work in the factory. At normal speed, it sorts batteries (Tesla's 4680 batteries) like this: The official also released what it looks like at 20x speed - on a small "workstation", picking and picking and picking: This time it is released One of the highlights of the video is that Optimus completes this work in the factory, completely autonomously, without human intervention throughout the process. And from the perspective of Optimus, it can also pick up and place the crooked battery, focusing on automatic error correction: Regarding Optimus's hand, NVIDIA scientist Jim Fan gave a high evaluation: Optimus's hand is the world's five-fingered robot. One of the most dexterous. Its hands are not only tactile
