

Several steps for embedded Linux project development

Development boards and associated software project examples provided by microcontroller manufacturers are often of great help to engineers when starting a new design. However, after the early stages of a design project are completed, the software provided by the manufacturer may cause some problems when designing further.
There are also many challenges for the design of using a real-time operating system as a platform for application code. For example, there are issues such as how to effectively allocate functions to different parallel tasks, how to design reliable inter-process communication, and how to test the entire software package on hardware.
More and more OEM manufacturers have found that the best way to avoid the above problems is to start new designs using a Linux operating system based on open source, proven, scalable, and able to run on various hardware platforms. The number of Linux operating system transplants on various computer hardware platforms is also second to none.
Linux derivatives are already used in a wide variety of embedded systems, including network routers, mobile phones, building automation controls, televisions, and video game consoles.
Although Linux is widely used and successful, this does not mean that it is easy to use. Linux contains over a million lines of code and operates in a distinctly "Linux way" that may take some getting used to for beginners.
Therefore, the purpose of this article is to help start a new design project using the Linux embedded operating system version-μClinux. This guide will be broken down into five steps. To illustrate the guide, a μClinux project implemented on STMicroelectronics' STM32F429 microcontroller, which uses an ARM Cortex-M4 core with a maximum frequency of 180MHz and uses Emcraft's STM32F429 Discovery Linux Board Support Package (BSP ).
Step 1: Linux Tools and Project Layout
Every embedded software design starts with choosing the right tools.
The tool chain is a set of software development tools that are connected (or linked) together. It includes tools such as the GNU Compiler Collection (GCC), binutils (a set of linkers, assemblers, and other tools for object files and archives). development tools) and glibc (a C function library that provides system calls and basic functions); in some cases, other tools such as compilers and debuggers may also be included.
The tool chain used for embedded development is a cross tool chain, more commonly known as a cross compiler.
GNUBinutils is the first component of the embedded Linux tool chain. GNUBinutils contains two important tools:
●"as", assembler, converts assembly code (generated by GCC) into binary code
●"ld", connector, connects discrete target code segments to libraries or form executable files
The compiler is the second important component of the tool chain. In Embedded Linux, it is called GCC and supports many kinds of microcontroller and processor architectures.
Next is the C function library. It implements Linux's traditional POSIX application programming interface (API), which can be used to develop user-space applications. It interfaces with the kernel through system calls and provides high-level services.
Engineers have several C function library options:
●glibc is an available C function library provided by the open source GNU project. The library is full-featured, portable and compliant with Linux standards.
●Embedded GLIBC (EGLIBC) is a derivative version optimized for embedded systems. Its code is streamlined, supports cross-compilation and cross-testing, and its source code and binary code are compatible with GLIBC.
●uClibc is another C function library that can be used when flash space is limited and/or the memory footprint must be minimal.
The debugger is usually also part of the tool chain, because when debugging the application running on the target machine, a cross-debugger is required. In the field of embedded Linux, GDB is a commonly used debugger.
The above tools are so indispensable, but when they work independently, it will take too long to compile the Linux source code and integrate it into the final image (image). Fortunately, Buildroot automates the process of building a complete embedded system and simplifies cross-compilation by generating any or all of the following tasks:
●Cross-compilation tool chain
●Root file system
●Kernel image
●Boot image
For embedded system designers, it is also convenient to use a tool (utility) aggregation tool, such as BusyBox, which integrates the tools that are usually most needed. According to BusyBox's information page, "It combines tiny versions of many common UNIX tools into a small executable. It provides an alternative to most of the tools you would typically see in tools like GNU fileutils and shellutils. BusyBox The tools in BusyBox are generally less selective than their full-featured GNU counterparts; but the included options provide expected functionality and behavior that is almost identical to that provided by the GNU counterpart. For any small or embedded system, BusyBox provides The environment is quite complete.”
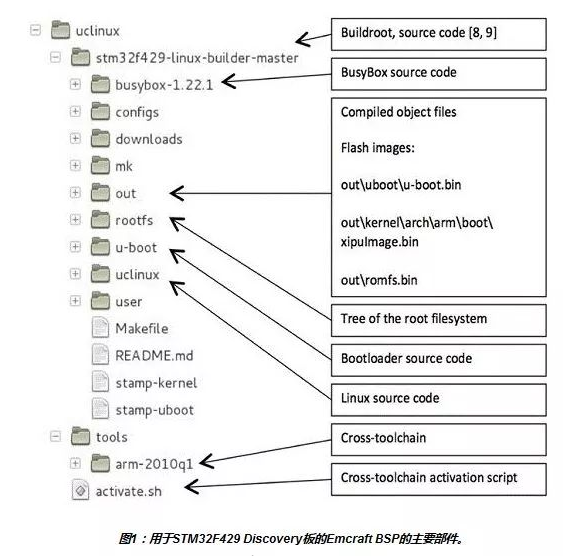
The last important tool is a BSP, which is specially made for the motherboard equipped with the project target MCU or processor.
The BSP includes pre-configured tools, as well as a bootloader to load the operating system onto the motherboard. It also provides source code for the kernel and device drivers (see Figure 1).
Step 2: Boot Sequence, Clock System, Memory and Serial Interface
The typical embedded Linux startup sequence is as follows:
1) The bootloader firmware (U-Boot in the example project) runs in the target MCU's built-in flash memory (no external memory required), and after power-on/reset, performs all necessary initialization work, including setting up the serial port and using Memory controller for external memory (RAM) access.
2) U-Boot can transfer the Linux image from external Flash to external RAM and transfer control to the kernel entry point in RAM. Linux images can be compressed to save flash space at the expense of decompression time at boot time.
3) Linux boots and installs a RAM-based file system (initramfs) as the root file system. When the project is built, the Initramfs is populated with the required files and directories and then simply linked to the kernel.
4) Under the Linux kernel, execute /sbin/init. The /sbin/init program initializes the system according to the description of the configuration file in /etc/inittab.
5) Once the initialization process completes run-level execution and commands in /sbin/init, it starts a login process.
6) The execution of the shell initialization file /etc/profile marks the completion of the startup process.
You can significantly shorten startup time and improve overall performance by enabling in-place execution (ExecuteInPlace—XIP), which is a method of executing code from flash memory. Typically, Linux code is loaded from flash memory to external memory and then executed from the external memory. By executing from flash memory, less memory is required because this copying step is no longer required, and read-only memory no longer takes up program space.
The above is the detailed content of Several steps for embedded Linux project development. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1386
1386
 52
52

 How to use docker desktop
Apr 15, 2025 am 11:45 AM
How to use docker desktop
Apr 15, 2025 am 11:45 AM
How to use Docker Desktop? Docker Desktop is a tool for running Docker containers on local machines. The steps to use include: 1. Install Docker Desktop; 2. Start Docker Desktop; 3. Create Docker image (using Dockerfile); 4. Build Docker image (using docker build); 5. Run Docker container (using docker run).
 Difference between centos and ubuntu
Apr 14, 2025 pm 09:09 PM
Difference between centos and ubuntu
Apr 14, 2025 pm 09:09 PM
The key differences between CentOS and Ubuntu are: origin (CentOS originates from Red Hat, for enterprises; Ubuntu originates from Debian, for individuals), package management (CentOS uses yum, focusing on stability; Ubuntu uses apt, for high update frequency), support cycle (CentOS provides 10 years of support, Ubuntu provides 5 years of LTS support), community support (CentOS focuses on stability, Ubuntu provides a wide range of tutorials and documents), uses (CentOS is biased towards servers, Ubuntu is suitable for servers and desktops), other differences include installation simplicity (CentOS is thin)
 What to do if the docker image fails
Apr 15, 2025 am 11:21 AM
What to do if the docker image fails
Apr 15, 2025 am 11:21 AM
Troubleshooting steps for failed Docker image build: Check Dockerfile syntax and dependency version. Check if the build context contains the required source code and dependencies. View the build log for error details. Use the --target option to build a hierarchical phase to identify failure points. Make sure to use the latest version of Docker engine. Build the image with --t [image-name]:debug mode to debug the problem. Check disk space and make sure it is sufficient. Disable SELinux to prevent interference with the build process. Ask community platforms for help, provide Dockerfiles and build log descriptions for more specific suggestions.
 How to view the docker process
Apr 15, 2025 am 11:48 AM
How to view the docker process
Apr 15, 2025 am 11:48 AM
Docker process viewing method: 1. Docker CLI command: docker ps; 2. Systemd CLI command: systemctl status docker; 3. Docker Compose CLI command: docker-compose ps; 4. Process Explorer (Windows); 5. /proc directory (Linux).
 What computer configuration is required for vscode
Apr 15, 2025 pm 09:48 PM
What computer configuration is required for vscode
Apr 15, 2025 pm 09:48 PM
VS Code system requirements: Operating system: Windows 10 and above, macOS 10.12 and above, Linux distribution processor: minimum 1.6 GHz, recommended 2.0 GHz and above memory: minimum 512 MB, recommended 4 GB and above storage space: minimum 250 MB, recommended 1 GB and above other requirements: stable network connection, Xorg/Wayland (Linux)
 Detailed explanation of docker principle
Apr 14, 2025 pm 11:57 PM
Detailed explanation of docker principle
Apr 14, 2025 pm 11:57 PM
Docker uses Linux kernel features to provide an efficient and isolated application running environment. Its working principle is as follows: 1. The mirror is used as a read-only template, which contains everything you need to run the application; 2. The Union File System (UnionFS) stacks multiple file systems, only storing the differences, saving space and speeding up; 3. The daemon manages the mirrors and containers, and the client uses them for interaction; 4. Namespaces and cgroups implement container isolation and resource limitations; 5. Multiple network modes support container interconnection. Only by understanding these core concepts can you better utilize Docker.
 What is vscode What is vscode for?
Apr 15, 2025 pm 06:45 PM
What is vscode What is vscode for?
Apr 15, 2025 pm 06:45 PM
VS Code is the full name Visual Studio Code, which is a free and open source cross-platform code editor and development environment developed by Microsoft. It supports a wide range of programming languages and provides syntax highlighting, code automatic completion, code snippets and smart prompts to improve development efficiency. Through a rich extension ecosystem, users can add extensions to specific needs and languages, such as debuggers, code formatting tools, and Git integrations. VS Code also includes an intuitive debugger that helps quickly find and resolve bugs in your code.
 vscode cannot install extension
Apr 15, 2025 pm 07:18 PM
vscode cannot install extension
Apr 15, 2025 pm 07:18 PM
The reasons for the installation of VS Code extensions may be: network instability, insufficient permissions, system compatibility issues, VS Code version is too old, antivirus software or firewall interference. By checking network connections, permissions, log files, updating VS Code, disabling security software, and restarting VS Code or computers, you can gradually troubleshoot and resolve issues.
