

Teach you step by step how to build linux rootfs

busybox overview
As we all know, in the Linux environment, everything is a file, and files can represent everything. The file system is a collection of these common components. In the embedded field, rootfs built based on busybox is often used to build file systems.
busybox has been around for nearly 20 years and has now become the mainstream rootfs building tool in the embedded industry.
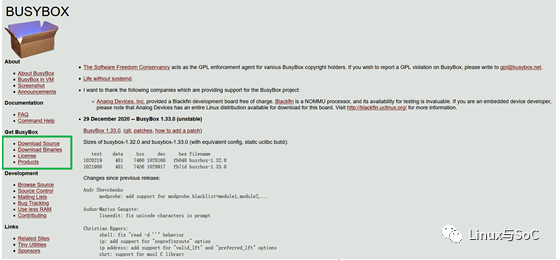
The code of busybox is completely open source. You can enter the official website and click "Download Source" under "Get BusyBox" to enter the source code download interface.
“
Official website link:
https://busybox.net/”
2. Configuration and compilation of busybox
After downloading the source code, copy the source code to the compilation environment. Busybox needs to be configured before compilation, which mainly involves three aspects:
\1. Compilation tool chain settings
\2. Compile mode setting
\3. Functions supported by the file system
The first two items must be completed, while the third point is formulated according to the user's own needs.
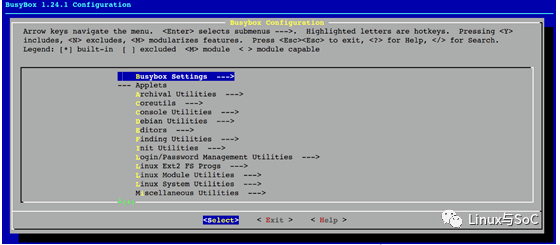
Execute make menuconfig to enter the configuration interface.
Compilation tool chain settings
The set cross-compilation tool chain must be the same as the tool chain used when compiling the kernel. For example, if the cross-compilation tool chain is set to arm-linux-gnueabi-, then enter the build options to set it. 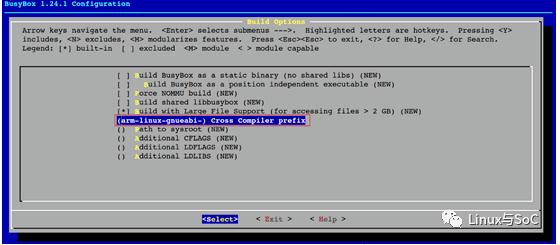
Of course, you can also enter the Makefile file in the root directory to modify the corresponding cross-compilation tool chain and platform information. 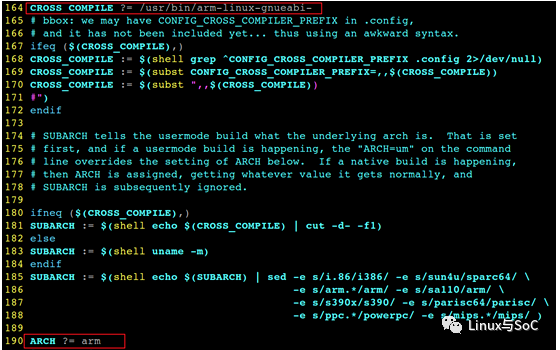
Compile mode setting
Set whether the compiled image file is static or dynamic. If it is dynamically compiled, you need to manually copy the lib library under the cross-compilation tool chain to the final _install folder, and vice versa. The configuration of static compilation is as follows. You can see that the prompt in brackets does not include shared libraries. If this option is not enabled, the compilation method will be dynamic. 
**Set functions supported by rootfs
**
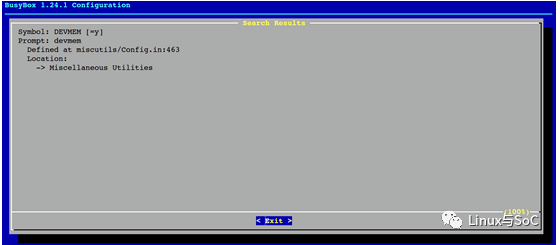
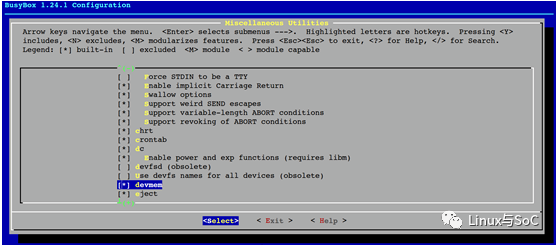
busybox can support hundreds of command lines and other functions, which can be increased or decreased according to your own needs. For example, if you add a devmem command line, check the corresponding enable box.
Compile
After executing make and make install, the _install folder will be generated in the compilation path, which contains bin, sbin, usr and other files. Check the devmem command just added and find that it has been compiled. 
At this time, copy the _install compiled under busybox as the basic framework of rootfs, and then add other necessary components.
3. Build rootfs
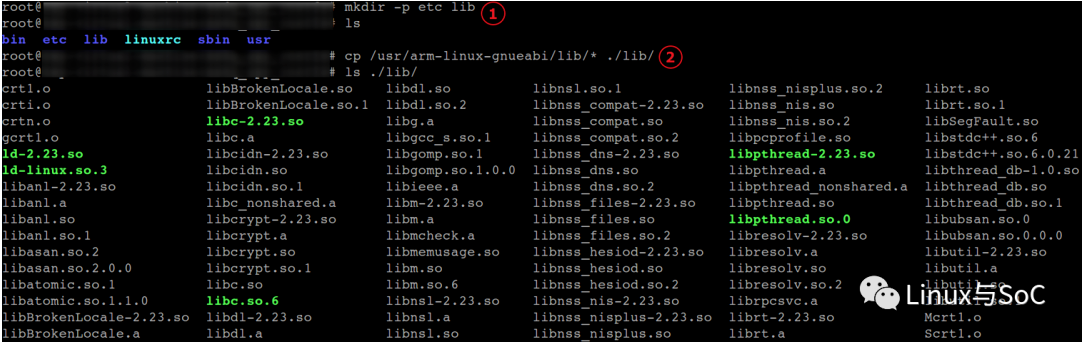
Copy out all the files under _install and create the lib and etc folders, and then copy the lib library under the cross-compilation tool chain arm-linux-gnueabi to the created lib folder.
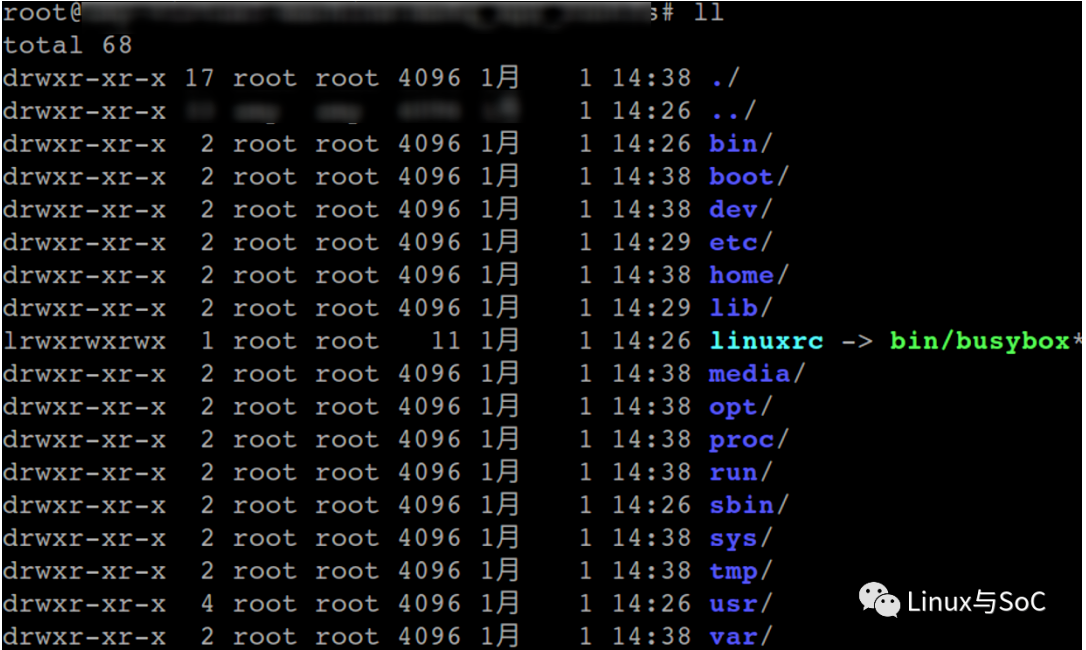
Then create home, opt, run, sys, var, boot, dev, media, proc, tmp, usr
Configure etc directory
- Create fstab file

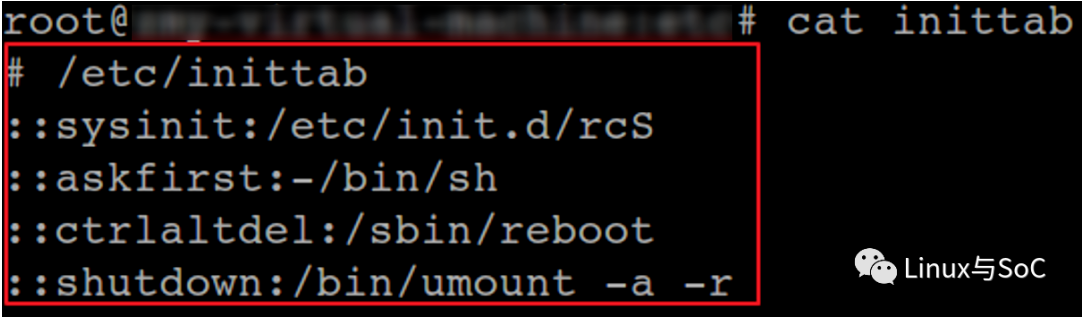
- Create inittab file
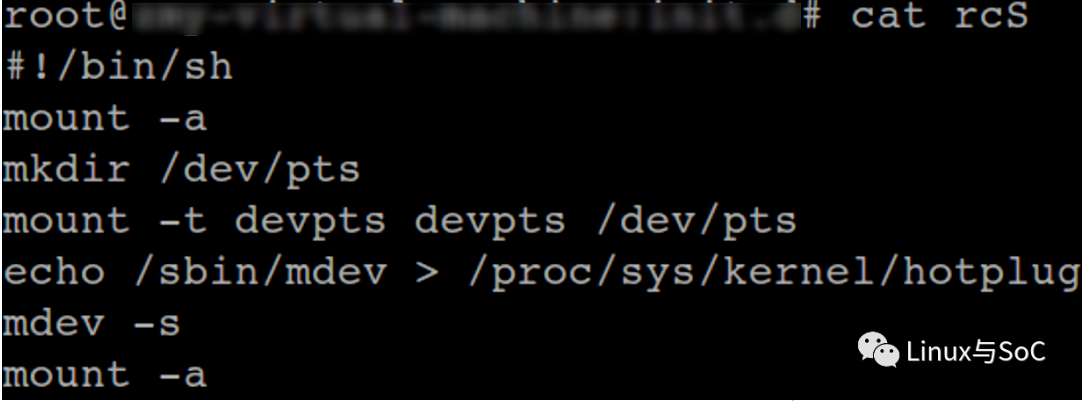
- Create rcS file
Before creating the rcS file, you need to manually create the init.d folder in the etc directory, and create rcS in the init.d folder.
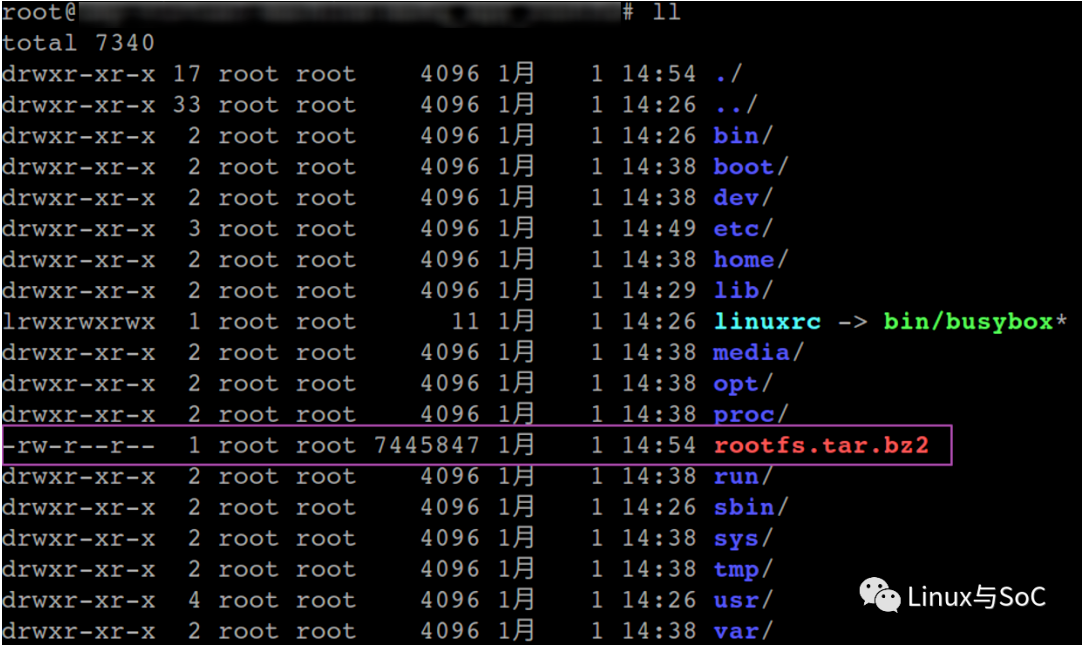
At this point, execute the following command to package and generate a lightweight rootfs.
tar -jcvf rootfs.tar.bz2 *
4. File system verification
Use mfgtools to download the compressed rootfs.tar.bz2 to mmc, start the system again, you can see that the created root file system can work normally, and the devmem command we added before can also be executed normally.

The above is the detailed content of Teach you step by step how to build linux rootfs. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 deepseek web version entrance deepseek official website entrance
Feb 19, 2025 pm 04:54 PM
deepseek web version entrance deepseek official website entrance
Feb 19, 2025 pm 04:54 PM
DeepSeek is a powerful intelligent search and analysis tool that provides two access methods: web version and official website. The web version is convenient and efficient, and can be used without installation; the official website provides comprehensive product information, download resources and support services. Whether individuals or corporate users, they can easily obtain and analyze massive data through DeepSeek to improve work efficiency, assist decision-making and promote innovation.
 How to install deepseek
Feb 19, 2025 pm 05:48 PM
How to install deepseek
Feb 19, 2025 pm 05:48 PM
There are many ways to install DeepSeek, including: compile from source (for experienced developers) using precompiled packages (for Windows users) using Docker containers (for most convenient, no need to worry about compatibility) No matter which method you choose, Please read the official documents carefully and prepare them fully to avoid unnecessary trouble.
 Ouyi okx installation package is directly included
Feb 21, 2025 pm 08:00 PM
Ouyi okx installation package is directly included
Feb 21, 2025 pm 08:00 PM
Ouyi OKX, the world's leading digital asset exchange, has now launched an official installation package to provide a safe and convenient trading experience. The OKX installation package of Ouyi does not need to be accessed through a browser. It can directly install independent applications on the device, creating a stable and efficient trading platform for users. The installation process is simple and easy to understand. Users only need to download the latest version of the installation package and follow the prompts to complete the installation step by step.
 BITGet official website installation (2025 beginner's guide)
Feb 21, 2025 pm 08:42 PM
BITGet official website installation (2025 beginner's guide)
Feb 21, 2025 pm 08:42 PM
BITGet is a cryptocurrency exchange that provides a variety of trading services including spot trading, contract trading and derivatives. Founded in 2018, the exchange is headquartered in Singapore and is committed to providing users with a safe and reliable trading platform. BITGet offers a variety of trading pairs, including BTC/USDT, ETH/USDT and XRP/USDT. Additionally, the exchange has a reputation for security and liquidity and offers a variety of features such as premium order types, leveraged trading and 24/7 customer support.
 Get the gate.io installation package for free
Feb 21, 2025 pm 08:21 PM
Get the gate.io installation package for free
Feb 21, 2025 pm 08:21 PM
Gate.io is a popular cryptocurrency exchange that users can use by downloading its installation package and installing it on their devices. The steps to obtain the installation package are as follows: Visit the official website of Gate.io, click "Download", select the corresponding operating system (Windows, Mac or Linux), and download the installation package to your computer. It is recommended to temporarily disable antivirus software or firewall during installation to ensure smooth installation. After completion, the user needs to create a Gate.io account to start using it.
 Ouyi Exchange Download Official Portal
Feb 21, 2025 pm 07:51 PM
Ouyi Exchange Download Official Portal
Feb 21, 2025 pm 07:51 PM
Ouyi, also known as OKX, is a world-leading cryptocurrency trading platform. The article provides a download portal for Ouyi's official installation package, which facilitates users to install Ouyi client on different devices. This installation package supports Windows, Mac, Android and iOS systems. Users can choose the corresponding version to download according to their device type. After the installation is completed, users can register or log in to the Ouyi account, start trading cryptocurrencies and enjoy other services provided by the platform.
 How to automatically set permissions of unixsocket after system restart?
Mar 31, 2025 pm 11:54 PM
How to automatically set permissions of unixsocket after system restart?
Mar 31, 2025 pm 11:54 PM
How to automatically set the permissions of unixsocket after the system restarts. Every time the system restarts, we need to execute the following command to modify the permissions of unixsocket: sudo...
 Why does an error occur when installing an extension using PECL in a Docker environment? How to solve it?
Apr 01, 2025 pm 03:06 PM
Why does an error occur when installing an extension using PECL in a Docker environment? How to solve it?
Apr 01, 2025 pm 03:06 PM
Causes and solutions for errors when using PECL to install extensions in Docker environment When using Docker environment, we often encounter some headaches...
