
 Technology peripherals
AI
AI mind-reading technology has been upgraded! A pair of glasses directly controls the Boston robot dog, making brain-controlled robots a reality
Technology peripherals
AI
AI mind-reading technology has been upgraded! A pair of glasses directly controls the Boston robot dog, making brain-controlled robots a reality
AI mind-reading technology has been upgraded! A pair of glasses directly controls the Boston robot dog, making brain-controlled robots a reality

Do you still remember the AI mind-reading skills from before? Recently, the ability to "make all your wishes come true" has evolved again.
-Humans can directly control robots through their own thoughts!
MIT researchers released the Ddog project. They independently developed a brain-computer interface (BCI) device to control Boston Dynamics' robot dog Spot.
Dogs can move to specific areas, help people get things, or take photos according to human thoughts.
Compared with the previous need to use a headgear with many sensors to "read the mind", this time the brain-computer interface device is presented in the form of wireless glasses (AttentivU).
Although the behavior shown in the video is simple, the purpose of this system is to transform Spot into a basic communication tool to help people with diseases such as ALS, cerebral palsy, or spinal cord injury.
All it takes is two iPhones and a pair of glasses to bring practical help and care to desperate people.
And, as we will see in related papers, this system is actually built on very complex engineering.

Paper address: https://doi.org/10.3390/s24010080
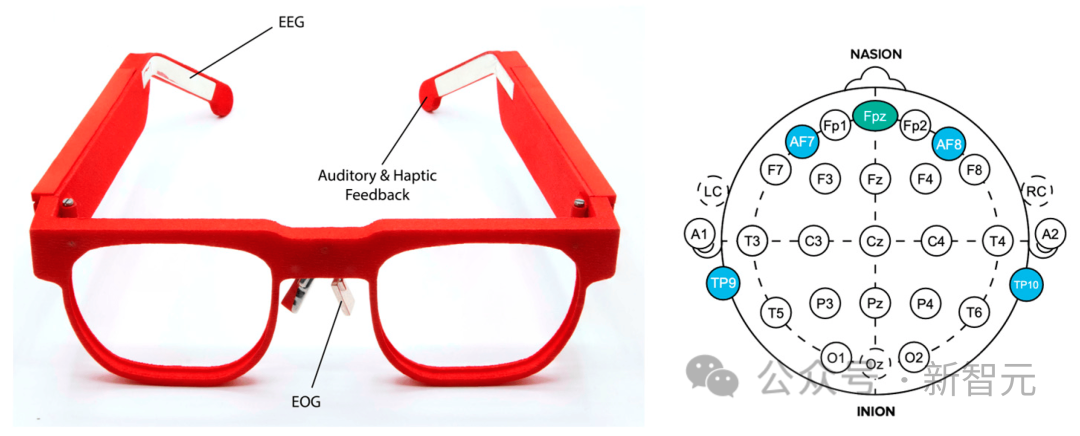
Usage of Ddog system AttentivU is a brain-computer interface system with sensors embedded in the frame to measure a person's electroencephalogram (EEG), or brain activity, and electrooculogram, or eye movement.
The foundation for this research is MIT’s Brain Switch, a real-time, closed-loop BCI that allows users to communicate nonverbally and in real time with caregivers.
The Ddog system has an 83.4% success rate and is the first time a wireless, non-visual BCI system has been integrated with Spot in a personal assistant use case.
In the video, we can see the evolution of brain interface devices and some of the thoughts of developers.
Prior to this, the research team has completed the interaction between the brain-computer interface and the smart home, and now has completed the control of a robot that can move and operate.
These studies have given special groups a glimmer of light, giving them hope of survival and even a better life in the future.
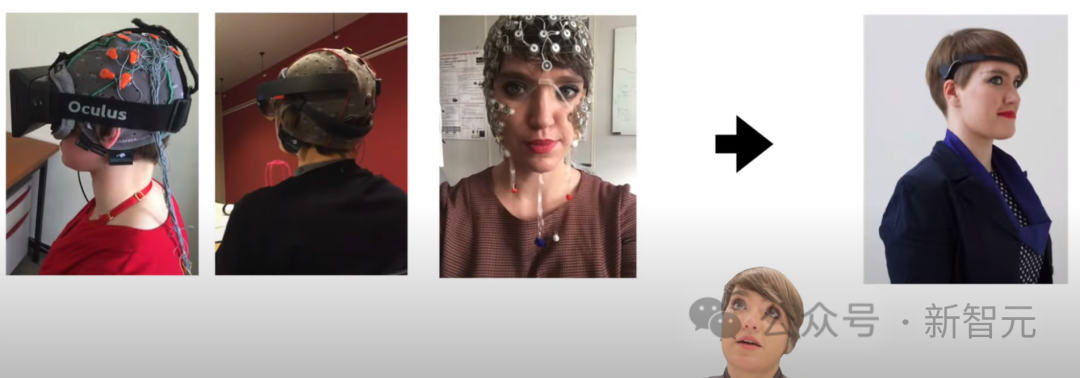
Compared to the octopus-like sensor headgear, the glasses below are indeed much cooler.

According to the National Organization for Rare Diseases, there are currently 30,000 ALS patients in the United States, and an estimated 5,000 new cases are diagnosed each year. Additionally, approximately 1 million Americans have cerebral palsy, according to the Cerebral Palsy Guide.
Many of these people have lost or will eventually lose the ability to walk, dress, talk, write, and even breathe.
While communication aids do exist, most are eye-gazing devices that allow users to communicate using a computer. There aren't many systems that allow users to interact with the world around them.
This BCI quadruped robotic system serves as an early prototype, paving the way for the future development of modern personal assistant robots.
Hopefully, we can see even more amazing capabilities in future iterations.
Brain-controlled quadruped robot
In this work, researchers explore how wireless and wearable BCI devices can control quadruped robots ——Boston Dynamics’ Spot.
The device developed by the researchers measures the user's electroencephalogram (EEG) and electrooculogram (EOG) activity through electrodes embedded in the frame of the glasses.
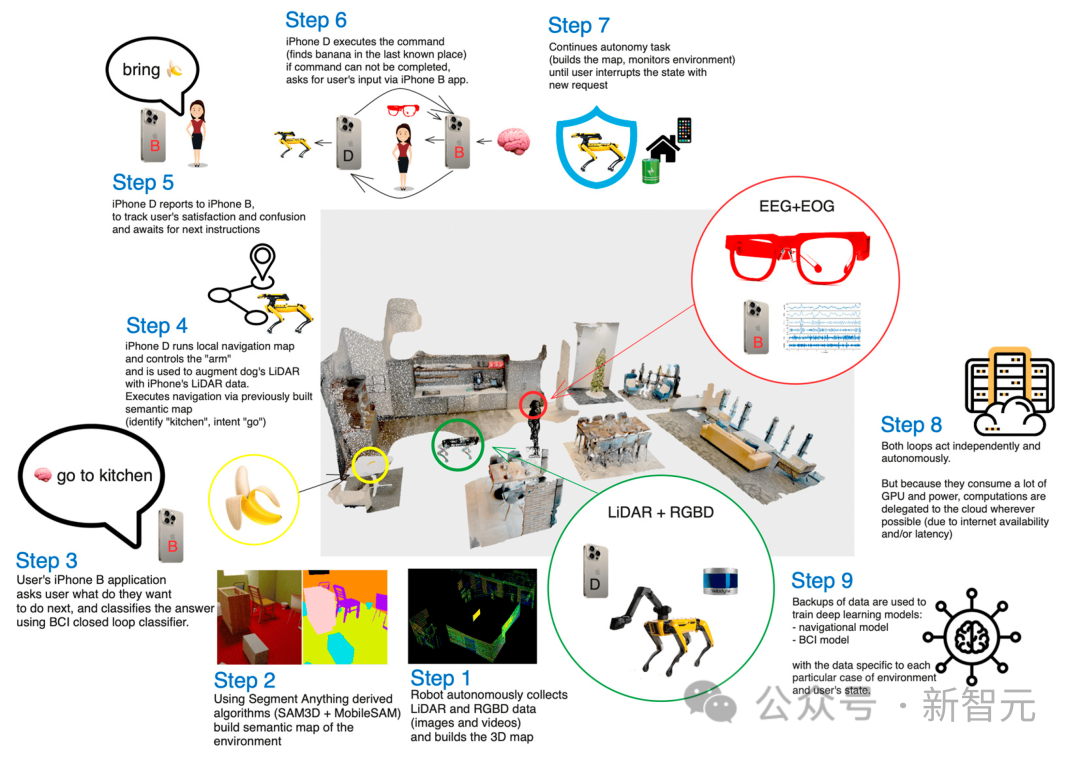
Users answer a series of questions in their mind ("yes" or "no"), and each question corresponds to a set of preset Spot operations.
For example, prompt Spot to walk through a room, pick up an object (such as a bottle of water), and then retrieve it for the user.
Robots and BCI
To this day, EEG remains one of the most practical and applicable non-invasive brain-computer interface methods.
BCI systems can be controlled using endogenous (spontaneous) or exogenous (evoked) signals.
In exogenous brain-computer interfaces, evoked signals occur when a person pays attention to external stimuli, such as visual or auditory cues.
The advantages of this approach include minimalist training and high bitrates of up to 60 bits/min, but this requires the user to always focus on the stimulus, thus limiting its use in real-life situations. applicability. Furthermore, users tire quickly when using exogenous BCIs.
In endogenous brain-computer interfaces, control signals are generated independently of any external stimulus and can be fully executed by the user on demand. For those users with sensory impairments, this provides a more natural and intuitive way of interacting, allowing users to spontaneously issue commands to the system.
However, this method usually requires longer training time and has a lower bit rate.
Robotic applications using brain-computer interfaces are often for people in need of assistance, and they often include wheelchairs and exoskeletons.
The figure below shows the latest progress in brain-computer interface and robotics technology as of 2023.
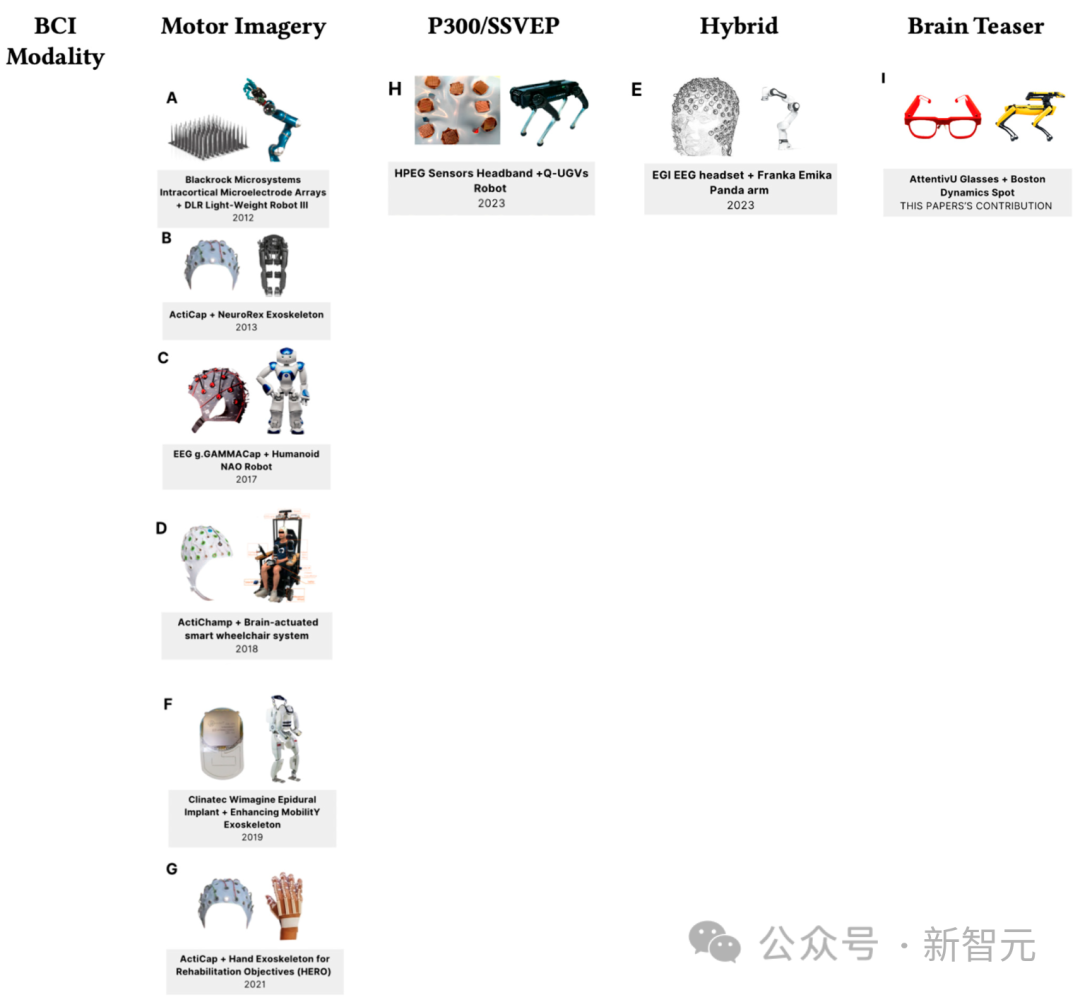
Quadruped robots are often used to support users in complex work environments or defense applications.
One of the most famous quadruped robots is Boston Dynamics’ Spot, which can carry up to 15 kilograms of payload and iteratively map maintenance sites such as tunnels. The real estate and mining industries are also adopting quadruped robots like Spot to help monitor job sites with complex logistics.
This article uses the Spot robot controlled by the mobile BCI solution and is based on mental arithmetic tasks. The overall architecture is named Ddog.
Ddog architecture
The following figure shows the overall structure of Ddog:
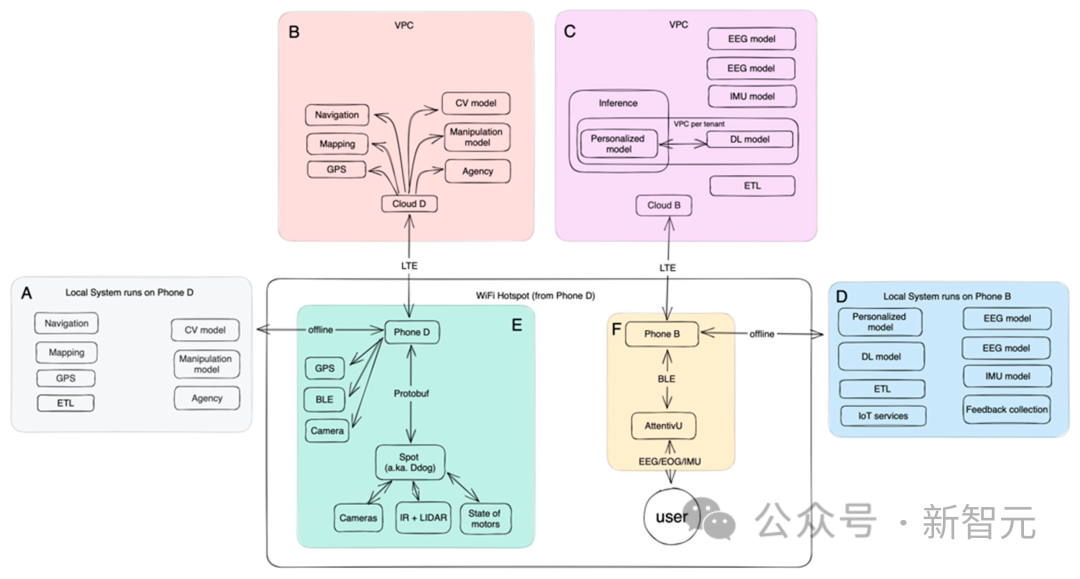
Ddog is an autonomous application that enables users to control the Spot robot through input from the BCI, while the application uses voice to provide feedback to the user and their caregivers.
The system is designed to work completely offline or completely online. The online version has a more advanced set of machine learning models, as well as better fine-tuned models, and is more power efficient for local devices.
The entire system is designed for real-life scenarios and allows for rapid iteration on most parts.
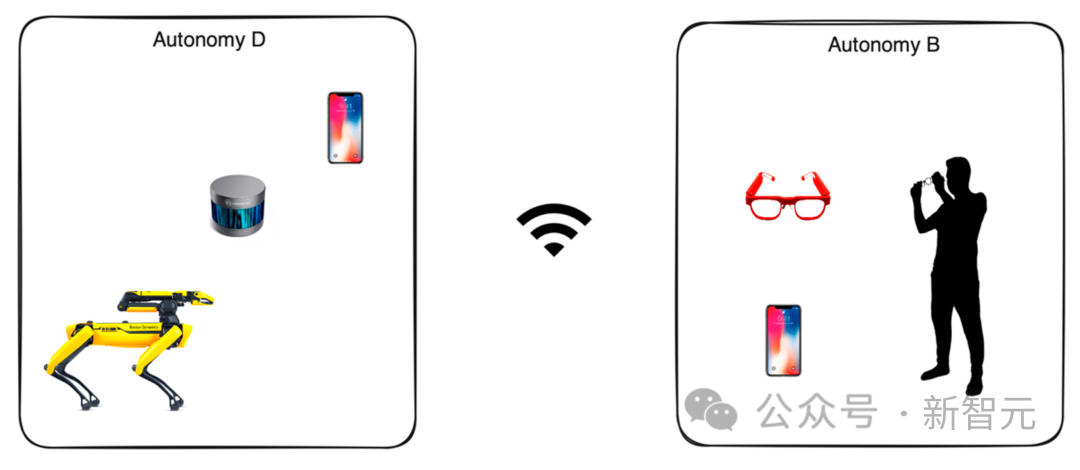
On the client side, the user interacts with the brain-computer interface device (AttentivU) through a mobile application that uses Bluetooth Low Energy ( BLE) protocol to communicate with the device.
The user’s mobile device communicates with another phone controlling the Spot robot to enable agency, manipulation, navigation, and ultimately assistance to the user.
Communication between mobile phones can be through Wi-Fi or mobile networks. The controlled mobile phone establishes a Wi-Fi hotspot, and both Ddog and the user's mobile phone are connected to this hotspot. When using online mode, you can also connect to models running on the cloud.
Server side
The server side uses Kubernetes (K8S) cluster, each cluster is deployed in its own Virtual Private Cloud (VPC) .
The cloud works within a dedicated VPC, typically deployed in the same Availability Zone closer to end users, minimizing response latency for each service.
Each container in the cluster is designed for a single purpose (microservice architecture). Each service is a running AI model. Their tasks include: navigation, mapping, Computer vision, manipulation, localization and agency.
Mapping: A service that collects information about the robot's surroundings from different sources. It maps static, immovable data (a tree, a building, a wall) but also collects dynamic data that changes over time (a car, a person).
Navigation: Based on map data collected and augmented in previous services, the navigation service is responsible for constructing a path between point A and point B in space and time. It is also responsible for constructing alternative routes, as well as estimating the time required.
Computer Vision: Collect visual data from robot cameras and augment it with data from your phone to generate spatial and temporal representations. This service also attempts to segment each visual point and identify objects.
Cloud is responsible for training BCI-related models, including electroencephalogram (EEG), electrooculogram (EOG) and inertial measurement unit (IMU).
The offline model deployed on the mobile phone runs data collection and aggregation, and also uses TensorFlow’s mobile model (for smaller RAM and based on ARM CPUs are optimized) for real-time inference.
Visual and Operational
The original version used to deploy the segmentation model was a single TensorFlow 3D model leveraging LIDAR data. The authors then extended this to a few-shot model and enhanced it by running complementary models on Neural Radiation Field (NeRF) and RGBD data.
The raw data collected by Ddog is aggregated from five cameras. Each camera can provide grayscale, fisheye, depth and infrared data. There is also a sixth camera inside the arm's gripper, with 4K resolution and LED capabilities, that works with a pre-trained TensorFlow model to detect objects.
The point cloud is generated from lidar data and RGBD data from Ddog and mobile phone. After data acquisition is complete, it is normalized through a single coordinate system and matched to a global state that brings together all imaging and 3D positioning data.
Operation is entirely dependent on the quality of the robotic arm gripper mounted on the Ddog, the one pictured below is manufactured by Boston Dynamics.
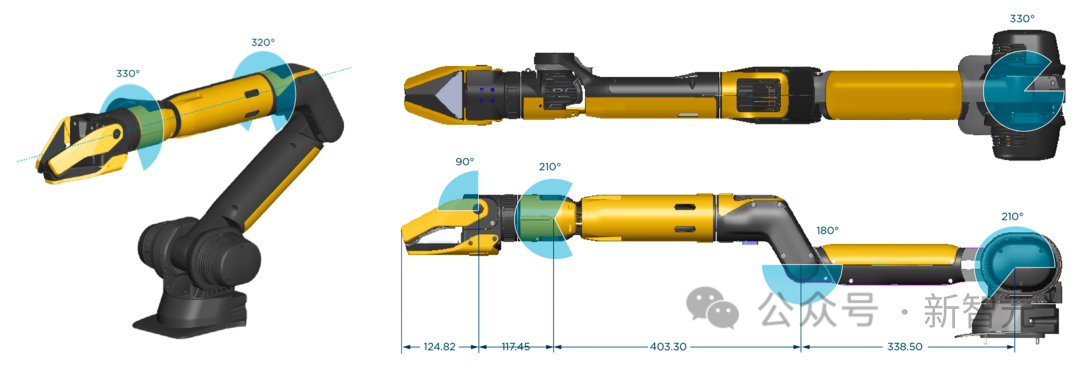
Limit the use cases in the experiment to basic interactions with objects in predefined locations.
The author drew a large laboratory space and set it up as an "apartment", which contained a "kitchen" area (with a tray with different cups and bottles), The "living room" area (small sofa with pillows and small coffee table), and the "window lounge" area.

The number of use cases is constantly growing, so the only way to cover most use cases is to deploy a system to run continuously for a period of time and use the data to Optimize such sequences and experiences.
AttentivU
EEG data is collected from the AttentivU device. The electrodes of AttentivU glasses are made of natural silver and are located at TP9 and TP10 according to the international 10-20 electrode placement system. The glasses also include two EOG electrodes located on the nose pads and an EEG reference electrode located at the Fpz position.
These sensors can provide the information needed and enable real-time, closed-loop intervention when needed.
The device has two modes, EEG and EOG, which can be used to capture signals of attention, engagement, fatigue and cognitive load in real time. EEG has been used as a neurophysiological indicator of the transition between wakefulness and sleep, while EOG is based on measuring bioelectrical signals induced during eye movements due to corneal-retinal dipole properties. . Research shows that eye movements correlate with the type of memory access needed to perform certain tasks and are a good measure of visual engagement, attention, and drowsiness.
Experiment
First divide the EEG data into several windows. Define each window as a 1 second long duration of EEG data with 75% overlap with the previous window.
Then comes data preprocessing and cleaning. Data were filtered using a combination of a 50 Hz notch filter and a bandpass filter with a passband of 0.5 Hz to 40 Hz to ensure removal of power line noise and unwanted high frequencies.
Next, the author created an artifact rejection algorithm. An epoch is rejected if the absolute power difference between two consecutive epochs is greater than a predefined threshold.
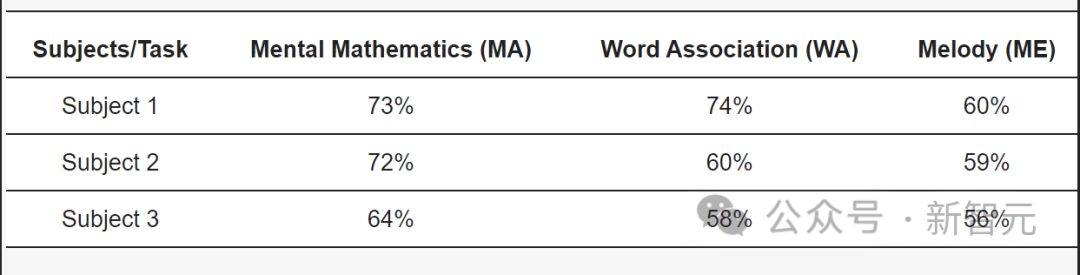
In the final step of classification, the authors mixed different spectral band power ratios to track each subject’s task-based mental activity. For MA, the ratio is (alpha/delta). For WA, the ratio is (delta/low beta) and for ME, the ratio is (delta/alpha).
Then, change point detection algorithms are used to track changes in these ratios. Sudden increases or decreases in these ratios indicate a change in the user's mental state.
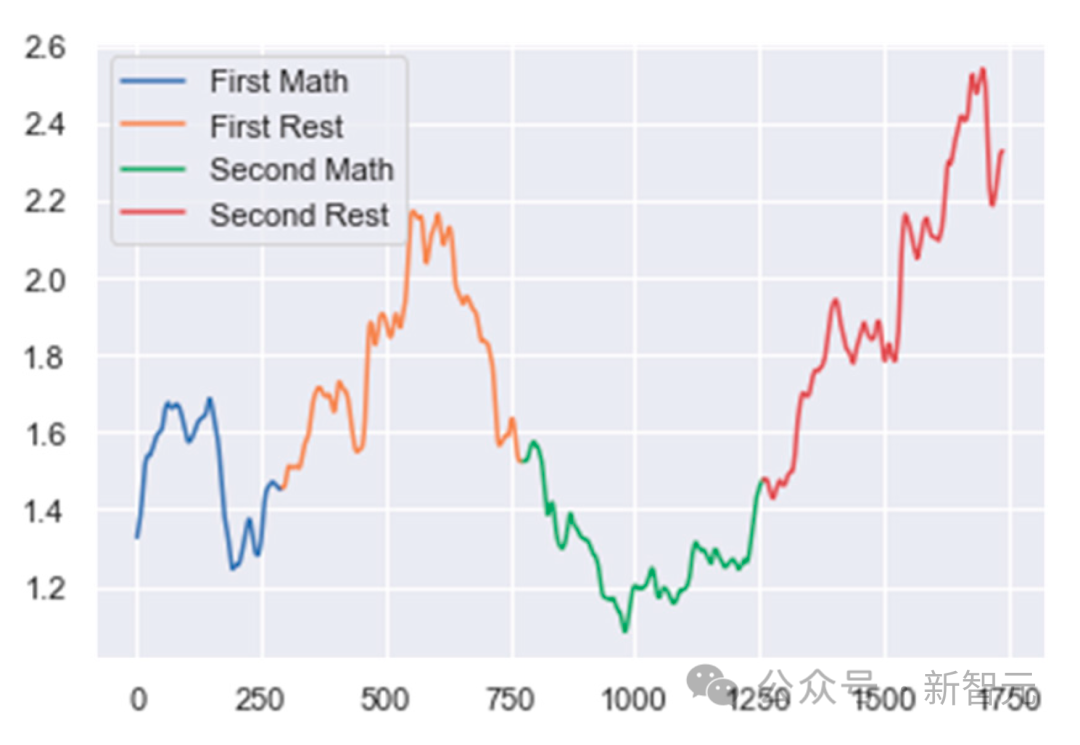
For subjects with ALS, our model achieved an accuracy of 73% in the MA task and an accuracy of 73% in the WA task. It achieved an accuracy of 74% and achieved an accuracy of 60% in the ME task.
The above is the detailed content of AI mind-reading technology has been upgraded! A pair of glasses directly controls the Boston robot dog, making brain-controlled robots a reality. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 How to output a countdown in C language
Apr 04, 2025 am 08:54 AM
How to output a countdown in C language
Apr 04, 2025 am 08:54 AM
How to output a countdown in C? Answer: Use loop statements. Steps: 1. Define the variable n and store the countdown number to output; 2. Use the while loop to continuously print n until n is less than 1; 3. In the loop body, print out the value of n; 4. At the end of the loop, subtract n by 1 to output the next smaller reciprocal.
 What are the types of return values of c language function? Summary of types of return values of c language function?
Apr 03, 2025 pm 11:18 PM
What are the types of return values of c language function? Summary of types of return values of c language function?
Apr 03, 2025 pm 11:18 PM
The return value types of C language function include int, float, double, char, void and pointer types. int is used to return integers, float and double are used to return floats, and char returns characters. void means that the function does not return any value. The pointer type returns the memory address, be careful to avoid memory leakage.结构体或联合体可返回多个相关数据。
 What are the pointer parameters in the parentheses of the C language function?
Apr 03, 2025 pm 11:48 PM
What are the pointer parameters in the parentheses of the C language function?
Apr 03, 2025 pm 11:48 PM
The pointer parameters of C language function directly operate the memory area passed by the caller, including pointers to integers, strings, or structures. When using pointer parameters, you need to be careful to modify the memory pointed to by the pointer to avoid errors or memory problems. For double pointers to strings, modifying the pointer itself will lead to pointing to new strings, and memory management needs to be paid attention to. When handling pointer parameters to structures or arrays, you need to carefully check the pointer type and boundaries to avoid out-of-bounds access.
 How to use C language function pointer to find the maximum value of a one-dimensional array
Apr 03, 2025 pm 11:45 PM
How to use C language function pointer to find the maximum value of a one-dimensional array
Apr 03, 2025 pm 11:45 PM
Flexible application of function pointers: use comparison functions to find the maximum value of an array. First, define the comparison function type CompareFunc, and then write the comparison function compareMax(a, b). The findMax function accepts array, array size, and comparison function parameters, and uses the comparison function to loop to compare array elements to find the maximum value. This method has strong code reusability, reflects the idea of higher-order programming, and is conducive to solving more complex problems.
 How to use the c language function pointer as return value
Apr 03, 2025 pm 11:42 PM
How to use the c language function pointer as return value
Apr 03, 2025 pm 11:42 PM
Function pointers can be used as return values to implement the mechanism of returning different functions according to different inputs. By defining the function type and returning the corresponding function pointer according to the selection, you can dynamically call functions, enhancing the flexibility of the code. However, pay attention to the definition of function pointer types, exception handling and memory management to ensure the robustness of the code.
 What are the rules for function definition and call in C language?
Apr 03, 2025 pm 11:57 PM
What are the rules for function definition and call in C language?
Apr 03, 2025 pm 11:57 PM
A C language function consists of a parameter list, function body, return value type and function name. When a function is called, the parameters are copied to the function through the value transfer mechanism, and will not affect external variables. Pointer passes directly to the memory address, modifying the pointer will affect external variables. Function prototype declaration is used to inform the compiler of function signatures to avoid compilation errors. Stack space is used to store function local variables and parameters. Too much recursion or too much space can cause stack overflow.
 How to define the call declaration format of c language function
Apr 04, 2025 am 06:03 AM
How to define the call declaration format of c language function
Apr 04, 2025 am 06:03 AM
C language functions include definitions, calls and declarations. Function definition specifies function name, parameters and return type, function body implements functions; function calls execute functions and provide parameters; function declarations inform the compiler of function type. Value pass is used for parameter pass, pay attention to the return type, maintain a consistent code style, and handle errors in functions. Mastering this knowledge can help write elegant, robust C code.
 CS-Week 3
Apr 04, 2025 am 06:06 AM
CS-Week 3
Apr 04, 2025 am 06:06 AM
Algorithms are the set of instructions to solve problems, and their execution speed and memory usage vary. In programming, many algorithms are based on data search and sorting. This article will introduce several data retrieval and sorting algorithms. Linear search assumes that there is an array [20,500,10,5,100,1,50] and needs to find the number 50. The linear search algorithm checks each element in the array one by one until the target value is found or the complete array is traversed. The algorithm flowchart is as follows: The pseudo-code for linear search is as follows: Check each element: If the target value is found: Return true Return false C language implementation: #include#includeintmain(void){i
