
 Technology peripherals
AI
How are cameras and lidar calibrated? An overview of all mainstream calibration tools in the industry
Technology peripherals
AI
How are cameras and lidar calibrated? An overview of all mainstream calibration tools in the industry
How are cameras and lidar calibrated? An overview of all mainstream calibration tools in the industry

The calibration of cameras and lidar is a crucial basic work in many tasks. The accuracy of calibration directly affects the upper limit of the effect of subsequent solution fusion. As many autonomous driving and robotics companies invest a lot of manpower and material resources to continuously improve the accuracy of calibration, today we will introduce you to some common Camera-Lidar calibration toolboxes, and we recommend that you collect them!
1.Libcbdetect
Multiple checkerboard detection in one shot: https://www.cvlibs.net/software/libcbdetect/
Use MATLAB The algorithm was written to automatically extract corner points and combine them with sub-pixel accuracy into a rectangular checkerboard-like pattern. This algorithm has the ability to process different types of images (such as pinhole cameras, fisheye cameras, panoramic cameras).

2.Autoware Calibration Package
Autoware framework lidar-camera calibration tool kit.
Link: https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
##3. Based on 3D-3D matching Target calibration
LiDAR camera calibration based on 3D-3D point correspondences, ROS package, from the paper "LiDAR-Camera Calibration using 3D-3D Point correspondences"! Link: https://github.com/ankitdhall/lidar_camera_calibration
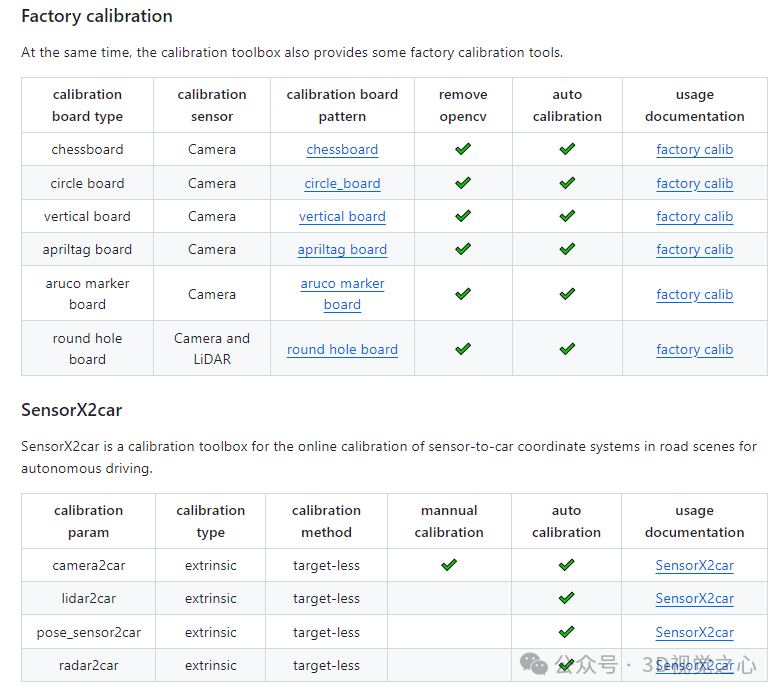
4. Shanghai AI Lab OpenCalib
Produced by Shanghai Artificial Intelligence Laboratory, OpenCalib provides a sensor calibration toolbox. The toolbox can be used to calibrate sensors such as IMU, lidar, camera and radar. Link: https://github.com/PJLab-ADG/SensorsCalibration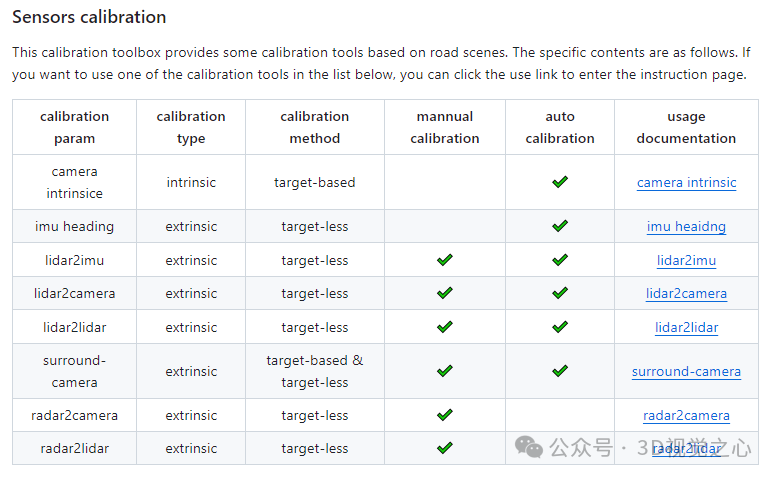
Apollo calibration toolbox, link: https://github.com/ApolloAuto/apollo/tree/master/modules/calibration
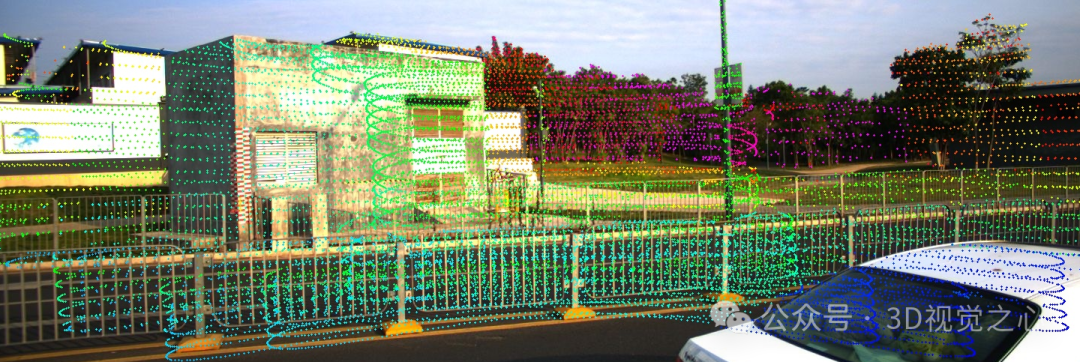
6.Livox -camera calibration toolThis solution provides a method to manually calibrate the external parameters between Livox radar and camera, and has been verified on Mid-40, Horizon and Tele-15. It includes codes related to calculating camera internal parameters, obtaining calibration data, optimizing calculation of external parameters and radar camera fusion applications. In this solution, the corner points of the calibration plate are used as the calibration target. Due to the non-repetitive scanning characteristics of the Livox radar, the density of the point cloud is relatively large, making it easier to find the accurate position of the corner points in the radar point cloud. Calibration and fusion of camera radar can also give good results.
Link: https://github.com/Livox-SDK/livox_camera_lidar_calibration
Chinese documentation: https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/ README_cn.md
7.CalibrationTools
CalibrationTools provides calibration tools for lidar-lidar, lidar camera and other sensor pairs. In addition to this, it also provides:
1) Positioning - Bias estimation tool estimates the parameters of sensors used for dead reckoning (IMU and odometry) for better positioning performance!
2) Visualization and analysis tool for Autoware control output;
3) Calibration tool for fixing vehicle command delays;
Link: https://github.com /tier4/CalibrationTools
##8.Matlab
Matlab’s own toolbox supports lidar and camera calibration, link :https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html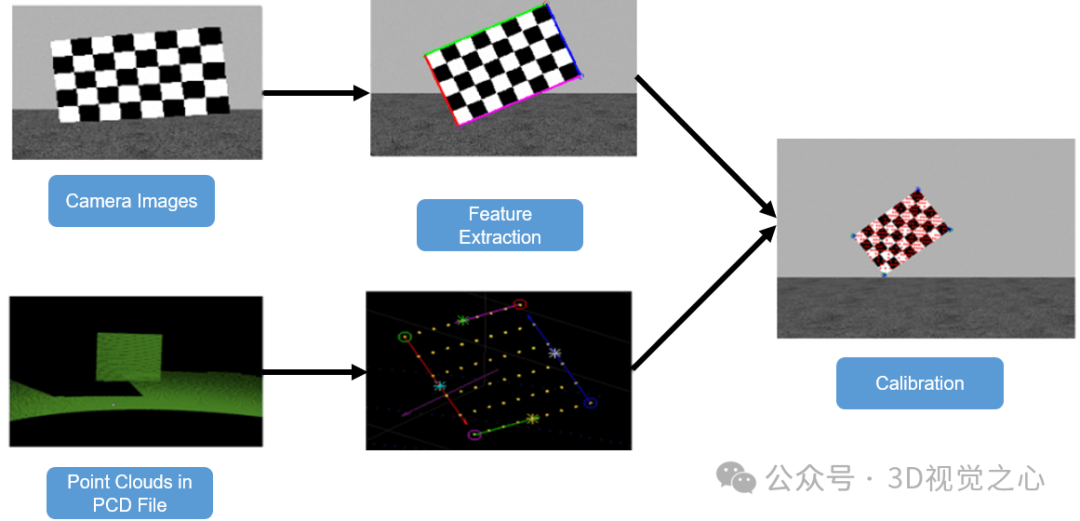
9.ROS Calibration Tool
ROS Camera LIDAR Calibration Package, link: https://github.com/heethesh/lidar_camera_calibration
10.Direct visual lidar calibration
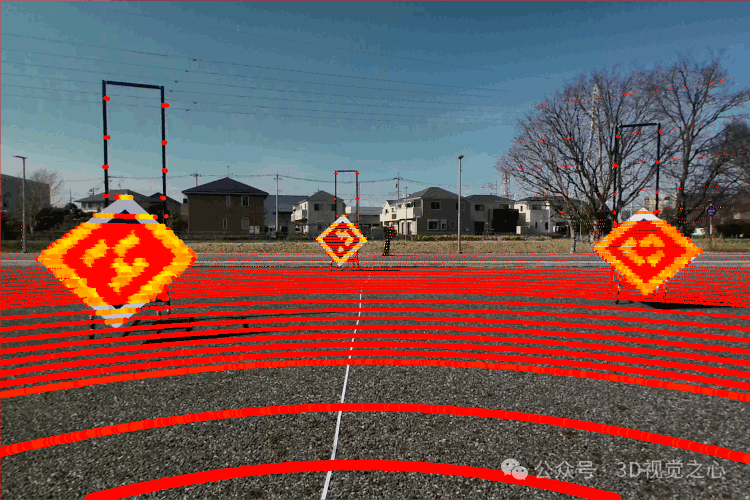
This package provides a toolbox for lidar camera calibration:Universal: It can handle a variety of lidar and camera projection models, including rotation and Non-repetitive scanning lidar, as well as pinhole, fisheye and omnidirectional projection cameras. No target: It does not require calibration targets, but uses environment structures and textures for calibration. Single shot: Calibration only requires at least a pair of lidar point clouds and camera images. Optionally, multiple lidar camera data pairs can be used to improve accuracy. Automatic: The calibration process is automatic and requires no initial guessing. Accurate and robust: It uses a pixel-level direct lidar camera registration algorithm, which is more robust and accurate compared to edge-based indirect lidar camera registration.
Link: https://github.com/koide3/direct_visual_lidar_calibration11.2D lidar-camera toolbox
This is a ROS-based Single-line laser and camera external parameters automatic calibration code. The calibration principle is shown in the figure below. The camera estimates the plane equation of the calibration plate plane in the camera coordinate system through the QR code. Since the laser point cloud falls on the plane, the point cloud is converted to the external parameters of the camera coordinate system through the laser coordinate system. In the camera coordinate system, the distance from the constructed point to the plane is used as the error, which is solved using nonlinear least squares. Link: https://github.com/MegviiRobot/CamLaserCalibraTool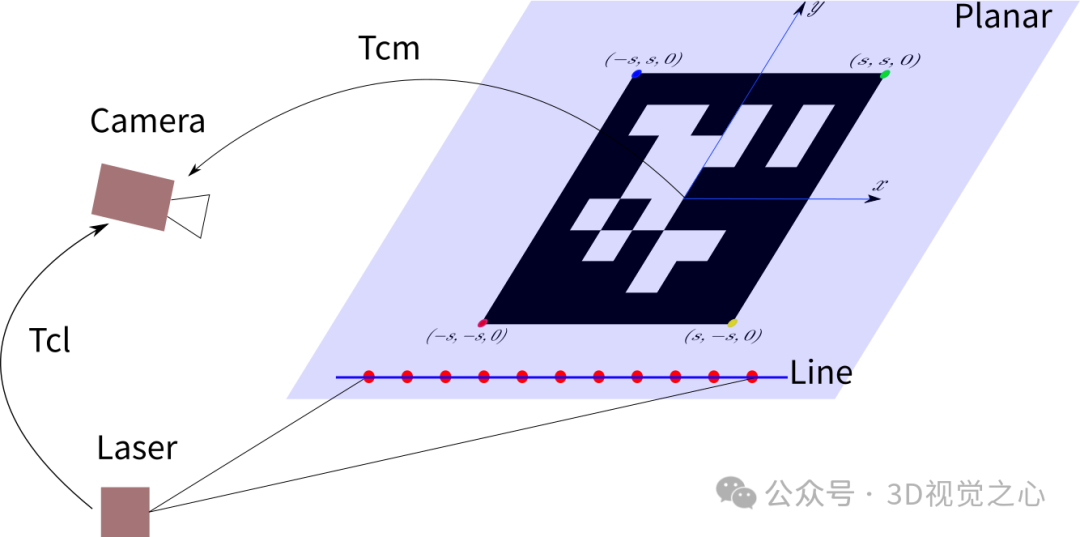
The above is the detailed content of How are cameras and lidar calibrated? An overview of all mainstream calibration tools in the industry. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1378
1378
 52
52

 How to optimize the performance of debian readdir
Apr 13, 2025 am 08:48 AM
How to optimize the performance of debian readdir
Apr 13, 2025 am 08:48 AM
In Debian systems, readdir system calls are used to read directory contents. If its performance is not good, try the following optimization strategy: Simplify the number of directory files: Split large directories into multiple small directories as much as possible, reducing the number of items processed per readdir call. Enable directory content caching: build a cache mechanism, update the cache regularly or when directory content changes, and reduce frequent calls to readdir. Memory caches (such as Memcached or Redis) or local caches (such as files or databases) can be considered. Adopt efficient data structure: If you implement directory traversal by yourself, select more efficient data structures (such as hash tables instead of linear search) to store and access directory information
 How to use Nginx logs to improve website speed
Apr 13, 2025 am 09:09 AM
How to use Nginx logs to improve website speed
Apr 13, 2025 am 09:09 AM
Website performance optimization is inseparable from in-depth analysis of access logs. Nginx log records the detailed information of users visiting the website. Cleverly using this data can effectively improve the speed of the website. This article will introduce several website performance optimization methods based on Nginx logs. 1. User behavior analysis and optimization. By analyzing the Nginx log, we can gain a deep understanding of user behavior and make targeted optimization based on this: High-frequency access IP identification: Find the IP address with the highest access frequency, and optimize the server resource configuration for these IP addresses, such as increasing bandwidth or improving the response speed of specific content. Status code analysis: analyze the frequency of different HTTP status codes (such as 404 errors), find out problems in website navigation or content management, and proceed
 How debian readdir integrates with other tools
Apr 13, 2025 am 09:42 AM
How debian readdir integrates with other tools
Apr 13, 2025 am 09:42 AM
The readdir function in the Debian system is a system call used to read directory contents and is often used in C programming. This article will explain how to integrate readdir with other tools to enhance its functionality. Method 1: Combining C language program and pipeline First, write a C program to call the readdir function and output the result: #include#include#include#includeintmain(intargc,char*argv[]){DIR*dir;structdirent*entry;if(argc!=2){
 How to recycle packages that are no longer used
Apr 13, 2025 am 08:51 AM
How to recycle packages that are no longer used
Apr 13, 2025 am 08:51 AM
This article describes how to clean useless software packages and free up disk space in the Debian system. Step 1: Update the package list Make sure your package list is up to date: sudoaptupdate Step 2: View installed packages Use the following command to view all installed packages: dpkg--get-selections|grep-vdeinstall Step 3: Identify redundant packages Use the aptitude tool to find packages that are no longer needed. aptitude will provide suggestions to help you safely delete packages: sudoaptitudesearch '~pimportant' This command lists the tags
 How Debian improves Hadoop data processing speed
Apr 13, 2025 am 11:54 AM
How Debian improves Hadoop data processing speed
Apr 13, 2025 am 11:54 AM
This article discusses how to improve Hadoop data processing efficiency on Debian systems. Optimization strategies cover hardware upgrades, operating system parameter adjustments, Hadoop configuration modifications, and the use of efficient algorithms and tools. 1. Hardware resource strengthening ensures that all nodes have consistent hardware configurations, especially paying attention to CPU, memory and network equipment performance. Choosing high-performance hardware components is essential to improve overall processing speed. 2. Operating system tunes file descriptors and network connections: Modify the /etc/security/limits.conf file to increase the upper limit of file descriptors and network connections allowed to be opened at the same time by the system. JVM parameter adjustment: Adjust in hadoop-env.sh file
 How to learn Debian syslog
Apr 13, 2025 am 11:51 AM
How to learn Debian syslog
Apr 13, 2025 am 11:51 AM
This guide will guide you to learn how to use Syslog in Debian systems. Syslog is a key service in Linux systems for logging system and application log messages. It helps administrators monitor and analyze system activity to quickly identify and resolve problems. 1. Basic knowledge of Syslog The core functions of Syslog include: centrally collecting and managing log messages; supporting multiple log output formats and target locations (such as files or networks); providing real-time log viewing and filtering functions. 2. Install and configure Syslog (using Rsyslog) The Debian system uses Rsyslog by default. You can install it with the following command: sudoaptupdatesud
 How Debian OpenSSL prevents man-in-the-middle attacks
Apr 13, 2025 am 10:30 AM
How Debian OpenSSL prevents man-in-the-middle attacks
Apr 13, 2025 am 10:30 AM
In Debian systems, OpenSSL is an important library for encryption, decryption and certificate management. To prevent a man-in-the-middle attack (MITM), the following measures can be taken: Use HTTPS: Ensure that all network requests use the HTTPS protocol instead of HTTP. HTTPS uses TLS (Transport Layer Security Protocol) to encrypt communication data to ensure that the data is not stolen or tampered during transmission. Verify server certificate: Manually verify the server certificate on the client to ensure it is trustworthy. The server can be manually verified through the delegate method of URLSession
 Debian mail server SSL certificate installation method
Apr 13, 2025 am 11:39 AM
Debian mail server SSL certificate installation method
Apr 13, 2025 am 11:39 AM
The steps to install an SSL certificate on the Debian mail server are as follows: 1. Install the OpenSSL toolkit First, make sure that the OpenSSL toolkit is already installed on your system. If not installed, you can use the following command to install: sudoapt-getupdatesudoapt-getinstallopenssl2. Generate private key and certificate request Next, use OpenSSL to generate a 2048-bit RSA private key and a certificate request (CSR): openss
