
 Technology peripherals
AI
Gaussian-LIC: The first multi-sensor fusion 3DGS-SLAM system (Zhejiang University & TUM)
Technology peripherals
AI
Gaussian-LIC: The first multi-sensor fusion 3DGS-SLAM system (Zhejiang University & TUM)
Gaussian-LIC: The first multi-sensor fusion 3DGS-SLAM system (Zhejiang University & TUM)

多重感測器與3DGS的結合
「基於3D空間中的取樣進行計算密集型SLAM任務所需的即時能力」的隱含表達式需要基於NeRF-based SLAM方法。 3DGS以其快速的渲染速度和優越的視覺品質而引人注目。作為一種明確且可以解釋的表達法,3DGS使得場景編輯變得簡單,有利於眾多下游任務的執行。
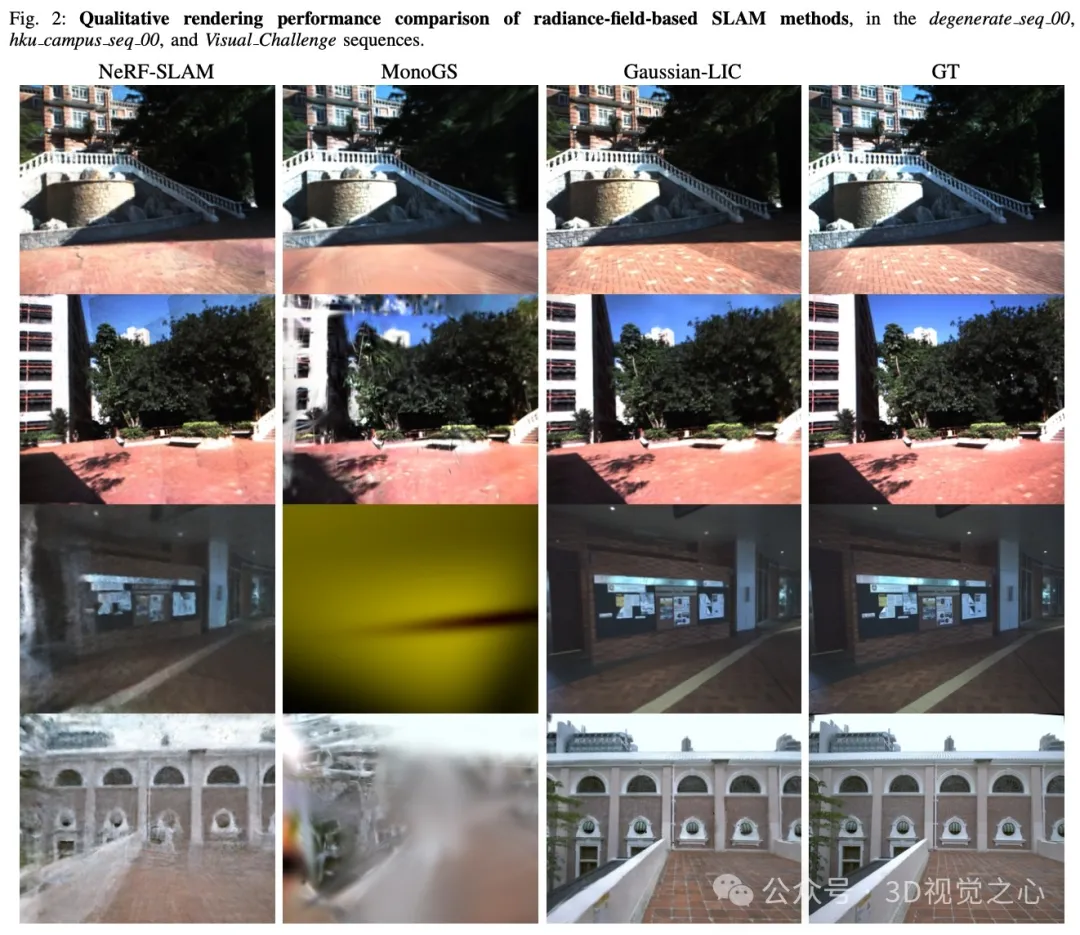
現有的基於輻射場的SLAM系統,主要在光照良好的小規模室內環境中進行測試,並使用順序RGB-D或RGB輸入獲得令人滿意的結果。當這些方法擴展到具有挑戰性的大規模不受控制的室外場景時將會遇到困難,例如具有挑戰性的光照條件、雜亂的背景和高度動態的自身運動。
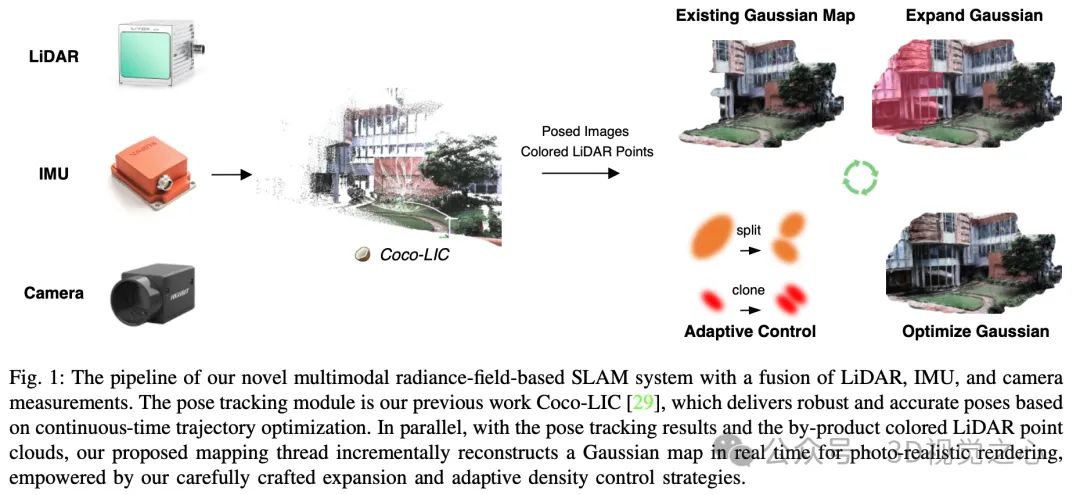
使用Gaussian-LIC 透過融合來自多個感測器的數據,包括3D雷射雷達、IMU和相機(稱為ALIC),在不受控制的室外場景中
- 首個基於雷射雷達慣性相機融合的3DGS-SLAM系統,實現了高度精確的姿態追蹤和逼真的線上地圖建構。
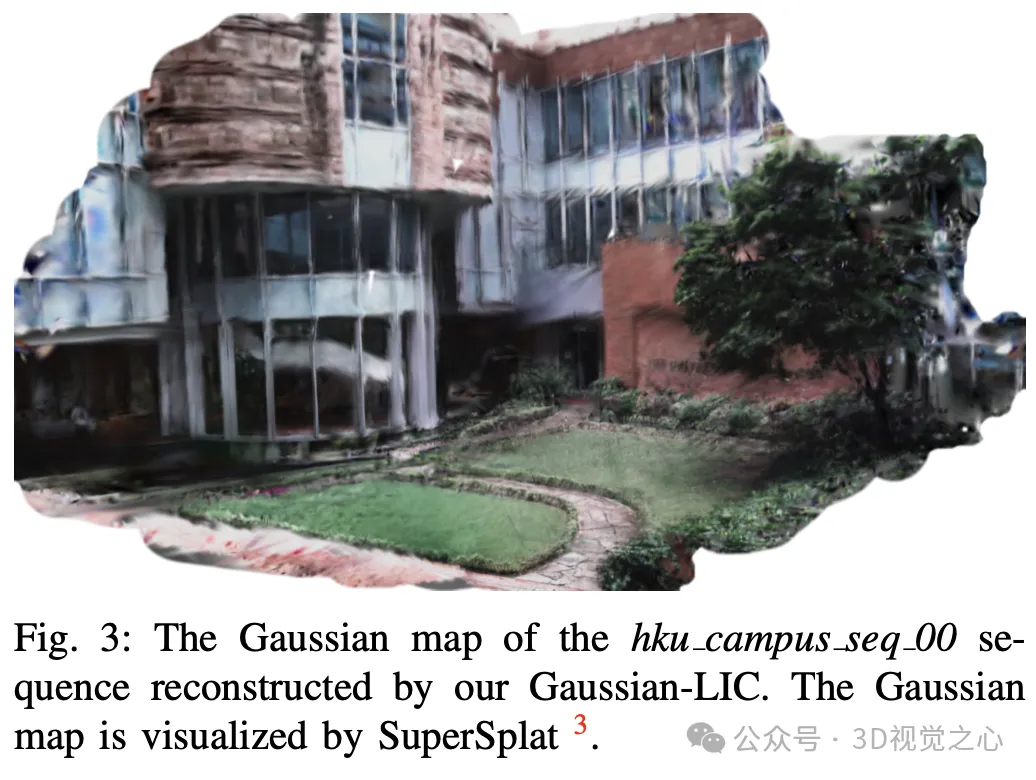
- 利用順序著色光達點雲作為先驗,以線上方式重建高斯地圖。利用精心設計的一系列策略,逐步擴展高斯地圖並自適應地控制其密度,以實現高效率和準確性。
- 在室內外場景中經過廣泛驗證,展示了逼真地圖製作的最新表現。在惡劣條件下表現出穩健性,包括高度動態運動、低照明和缺乏幾何結構和視覺紋理。
具體方法
如圖1所示是LIC-SLAM系統流程。
3DGS的表示
#將場景表示為各向異性的3D高斯集合,每個高斯的變異數:

將3D高斯投影到影像平面上,獲得2D高斯分佈:
投影獲得的2D高斯透過不透明度加權方程式影響像素:

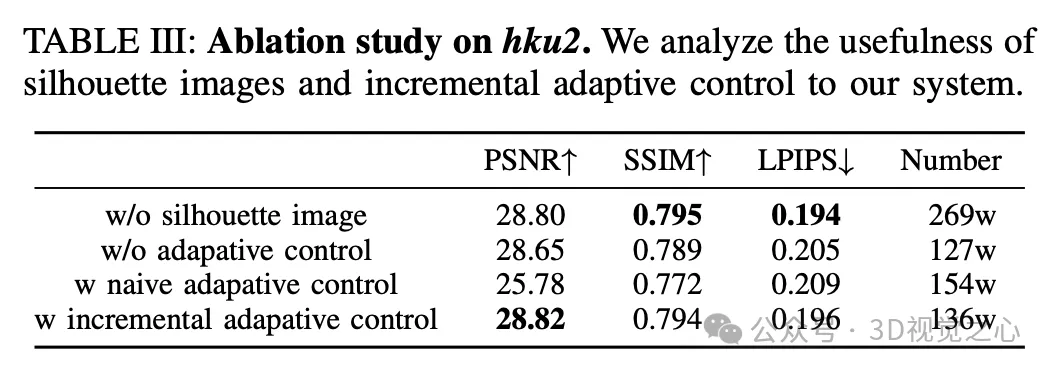
渲染輪廓圖像以確定像素是否包含了足夠的來自高斯地圖的資訊:

LiDAR-IMU-Camera里程計
里程計採用了先前的工作Coco-LIC作為追蹤前端,一個連續時間緊密耦合的雷射雷達慣性攝影機測距系統。透過整合三種互補的感測器,Gaussian-LIC實現了強大、即時和高精度的姿態估計,從而促進了整個SLAM系統的運作。
每當最新的 (本文為0.1秒)內的雷射雷達慣性攝影機資料被累積時,會基於因子圖有效地優化該時間間隔內的軌跡:
- 光達點雲到地圖
- 影像到地圖的視覺因子
- IMU因子
- 偏差因子
在時間間隔內我們僅利用最新的影像進行優化。
Gaussian-LIC維護一個以0.1公尺解析度儲存在體素中的全域雷射雷達地圖。在優化當前時間間隔內的軌跡後,為了提高效率,僅將該時間段內四分之一的激光雷達點轉換為世界坐標並附加到體素中,以確保每個體素中的激光雷達點之間的距離應大於0.05米,以減少冗餘。對於成功附加的光達點,將它們投影到最新的圖像上,並透過查詢像素值為其著色。隨後,它們與估計的相機姿態的最新圖像一起發送到映射線程,被視為一幀。
基於3DGS的逼真建圖
隨著持續輸入:估計的相機姿態、無畸變影像、著色的雷射雷達點,建圖模組逐步建構和優化高斯地圖,主要分4步:
- 初始化:利用在第一個時間間隔內接收到的所有雷射光測點來創建新的高斯分佈。為了減輕混疊偽影,我們為距離較近的高斯分佈分配較小的尺度,而對於遠離影像平面的高斯分佈則分配較大的尺度:

- Extension: Normally, each frame received captures the geometry and appearance of a new viewing area. In order to avoid duplication or extremely similar information redundancy, first render a contour image from the current image view according to equation (6), and generate a mask to select the current Gaussian Unreliable pixels in the map and tend to observe new areas, only lidar points that can be projected onto the selected pixel will be exploited:

- Optimization: Optimization using all received images is computationally infeasible for our online incremental mapping system, so every fifth image frame is considered a keyframe. To keep the computational complexity bounded for efficiency, we select active keyframes to optimize the Gaussian map, including the first and last keyframe, and other randomly selected keyframes, avoiding the catastrophic forgetting problem and maintaining the geometric consistency of the global map. We randomly shuffle the selected keyframes and iterate through each keyframe one by one, optimizing the map by minimizing the re-rendering loss:

- Adaptive Control: LiDAR scanning may not cover the entire scene, especially in borderless outdoor environments. It is therefore necessary to perform adaptive control to densify the Gaussian map within unit volume. The original strategy handles Gaussians with large gradients at fixed intervals, while in incremental mode, since they often have not converged yet, recently added Gaussians may be incorrectly cloned or split due to having large gradients. The solution is to classify the existing Gaussian distributions into stable and unstable categories, and only densify the stable Gaussian distributions.
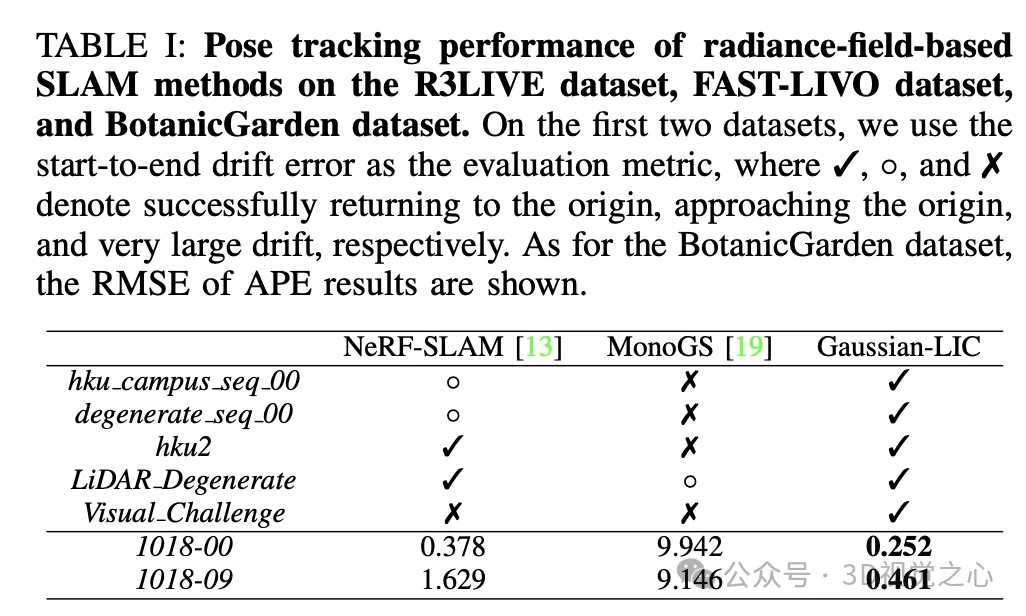
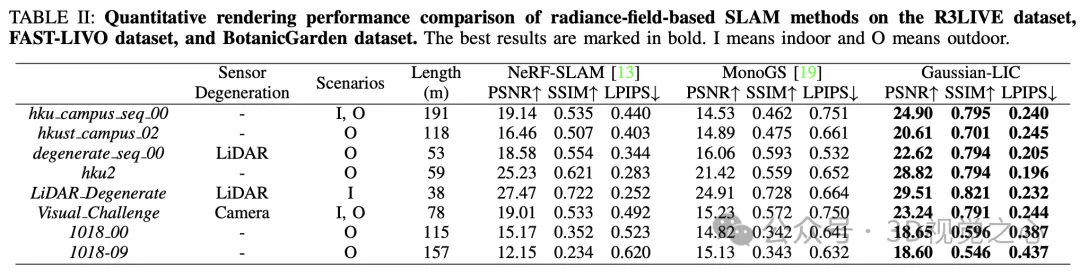
experiment
Summary and Discussion
Gaussian-LIC is a novel LiDAR-inertial-camera radiation field SLAM system, It achieves the dual functions of highly accurate tracking and realistic online reconstruction with 3D Gaussian splatter. Shaded LiDAR points in world coordinates produced by efficient LiDAR-inertial-camera odometry are used as good priors to assist in the incremental building of Gaussian maps with significantly better generalization in indoor and outdoor scenes .
Room for improvement:
- Try to remove unnecessary Gaussian distributions in the map.
- Supports various lidar, currently only trying to use solid-state lidar.
- The camera's automatic exposure and motion blur affect the visual quality of realistic maps.
The above is the detailed content of Gaussian-LIC: The first multi-sensor fusion 3DGS-SLAM system (Zhejiang University & TUM). For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 Wow awesome! Samsung Galaxy Ring experience: 2999 yuan real smart ring
Jul 19, 2024 pm 02:31 PM
Wow awesome! Samsung Galaxy Ring experience: 2999 yuan real smart ring
Jul 19, 2024 pm 02:31 PM
Samsung officially released the national version of Samsung Galaxy Ring on July 17, priced at 2,999 yuan. Galaxy Ring's real phone is really the 2024 version of "WowAwesome, this is my exclusive moment". It is the electronic product that makes us feel the freshest in recent years (although it sounds like a flag) besides Apple's Vision Pro. (In the picture, the rings on the left and right are Galaxy Ring↑) Samsung Galaxy Ring specifications (data from the official website of the Bank of China): ZephyrRTOS system, 8MB storage; 10ATM waterproof + IP68; battery capacity 18mAh to 23.5mAh (different sizes
 Upgrade to full screen! iPhone SE4 advanced to September
Jul 24, 2024 pm 12:56 PM
Upgrade to full screen! iPhone SE4 advanced to September
Jul 24, 2024 pm 12:56 PM
Recently, new news about iPhone SE4 was revealed on Weibo. It is said that the back cover process of iPhone SE4 is exactly the same as that of the iPhone 16 standard version. In other words, iPhone SE4 will use a glass back panel and a straight screen and straight edge design. It is reported that iPhone SE4 will be released in advance to September this year, which means it is likely to be unveiled at the same time as iPhone 16. 1. According to the exposed renderings, the front design of iPhone SE4 is similar to that of iPhone 13, with a front camera and FaceID sensor on the notch screen. The back uses a layout similar to the iPhoneXr, but it only has one camera and does not have an overall camera module.
 How big is the 1-inch sensor of a mobile phone? It's actually bigger than the 1-inch sensor of a camera
May 08, 2024 pm 06:40 PM
How big is the 1-inch sensor of a mobile phone? It's actually bigger than the 1-inch sensor of a camera
May 08, 2024 pm 06:40 PM
Yesterday's article didn't mention "sensor size". I didn't expect people to have so many misunderstandings... How much is 1 inch? Because of some historical issues*, whether it is a camera or a mobile phone, "1 inch" in the diagonal length of the sensor is not 25.4mm. *When it comes to vacuum tubes, there is no expansion here. It is a bit like a horse’s butt deciding the width of a railroad track. In order to avoid misunderstanding, the more rigorous writing is "Type 1.0" or "Type1.0". Moreover, when the sensor size is less than 1/2 type, type 1 = 18mm; and when the sensor size is greater than or equal to 1/2 type, type 1 =
 How are cameras and lidar calibrated? An overview of all mainstream calibration tools in the industry
Mar 22, 2024 pm 02:01 PM
How are cameras and lidar calibrated? An overview of all mainstream calibration tools in the industry
Mar 22, 2024 pm 02:01 PM
Calibration of cameras and lidar is a crucial basic work in many tasks. The accuracy of calibration directly affects the upper limit of the effect of subsequent solution fusion. As many autonomous driving and robotics companies invest a lot of manpower and material resources to continuously improve the accuracy of calibration, today we will introduce you to some common Camera-Lidar calibration toolboxes, and we recommend that you collect them! 1.Libcbdetect detects multiple checkerboards in one shot: https://www.cvlibs.net/software/libcbdetect/The algorithm written using MATLAB can automatically extract corner points and make them accurate to the sub-pixel level, and combine these corner points into Rectangular checkerboard pattern. It should be counted
 AirPods Pro and AirPods 3: How to change the force sensor controls
Apr 13, 2023 am 11:43 AM
AirPods Pro and AirPods 3: How to change the force sensor controls
Apr 13, 2023 am 11:43 AM
AirPods Pro come with great features like noise cancellation and transparency mode with an in-ear design. To switch between these and other features, force sensors in the AirPods Pro (and AirPods 3) stems provide easy control. Read on to learn how to change AirPods controls, including press speed, press duration, what the left and right force sensors do, and more. AirPods gen 1 and 2 use a double tap on the earbuds for control. But AirPods Pro and AirPods 3 use pressure sensors built into the stem of each earbud. We'll cover three ways to toggle between noise reduction, transparency, and off, and how to customize the force sensor
 Domestic sensor ceiling! Detailed explanation of OV50K40 sensor
Mar 20, 2024 am 09:56 AM
Domestic sensor ceiling! Detailed explanation of OV50K40 sensor
Mar 20, 2024 am 09:56 AM
Domestic manufacturer Howe has released a new CMOS-OV50K40 sensor. This sensor is the world's first smartphone image sensor using TheiaCel technology. Its unique design enables a single exposure to achieve a dynamic range close to the human eye level. The OV50K40 sensor has a native resolution of 50 million pixels and uses a 1/1.3-inch large base area, with the area of each pixel reaching 1.2 microns. In addition, it also supports four-in-one pixel output, which means combining four pixels into one to output a 12.5-megapixel image, thus bringing more powerful photosensitivity. The sensor’s frame rate supports 120 frames/second and 60 frames/second (HDR) for a full 50-megapixel B
 Why do some people think Android photography can beat Apple? The answer is so direct
Mar 25, 2024 am 09:50 AM
Why do some people think Android photography can beat Apple? The answer is so direct
Mar 25, 2024 am 09:50 AM
When discussing the camera function of Android phones, most users give it positive feedback. Compared with Apple phones, users generally believe that Android phones have better camera performance. This view is not unfounded, and the practical reasons are obvious. High-end Android phones have greater competitive advantages in terms of hardware configuration, especially camera sensors. Many high-end Android phones use the latest, top-of-the-line camera sensors, which are often more outstanding than iPhones released at the same time in terms of pixel count, aperture size, and optical zoom capabilities. This advantage enables Android phones to provide higher-quality imaging effects when taking photos and recording videos, meeting users' needs for photography and videography. Therefore, the competitive advantage of hardware configuration has become the attraction of Android phones.
 Xiaomi 15 series full codenames revealed: Dada, Haotian, Xuanyuan
Aug 22, 2024 pm 06:47 PM
Xiaomi 15 series full codenames revealed: Dada, Haotian, Xuanyuan
Aug 22, 2024 pm 06:47 PM
The Xiaomi Mi 15 series is expected to be officially released in October, and its full series codenames have been exposed in the foreign media MiCode code base. Among them, the flagship Xiaomi Mi 15 Ultra is codenamed "Xuanyuan" (meaning "Xuanyuan"). This name comes from the Yellow Emperor in Chinese mythology, which symbolizes nobility. Xiaomi 15 is codenamed "Dada", while Xiaomi 15Pro is named "Haotian" (meaning "Haotian"). The internal code name of Xiaomi Mi 15S Pro is "dijun", which alludes to Emperor Jun, the creator god of "The Classic of Mountains and Seas". Xiaomi 15Ultra series covers
