

NGUI研究之3D模型坐标转2D屏幕坐标

刚好今天有朋友问我,比较典型的例子就是游戏里面人物的血条。原理很简单就是把3D点换算成2D的点,但是由于NGUI自身是3D所以我们需要先把NGUI下的点转成2D点,然后在把他转成3D的点。听起来有点绕,不要紧我直接上代码。对屏幕自适应不明白的看NGUI研究之如
刚好今天有朋友问我,比较典型的例子就是游戏里面人物的血条。原理很简单就是把3D点换算成2D的点,但是由于NGUI自身是3D所以我们需要先把NGUI下的点转成2D点,然后在把他转成3D的点。听起来有点绕,不要紧我直接上代码。对屏幕自适应不明白的看NGUI研究之如何自适应屏幕
目前我一直都是用NGUI来做人物血条,但是2D血条都会有个限制,就是它不能和模型有遮挡关系。不过血条可以根据人物的位置调节,比如远一点的人物血条会小一些,近一点的人物血条会大一些。
最好让美术做FBX的时候直接内置一个GameObject 的点,因为模型有的高有的低,所以血条的位置高度是不一样的,如果美术内置的话可以让美术来调节模型头顶上的点,这样比较方便。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
using UnityEngine; using System.Collections;
publicclassNewBehaviourScript :MonoBehaviour{
//角色 publicTransform Cube; //角色的血条 publicTransform UI;
//默认血条缩与摄像机的距离 privatefloatFomat; //角色头顶的点, 最好让美术把这个点直接做在fbx模型里面。 privateTransform Head;
voidStart() { //找到角色身上头顶的点 Head=Cube.Find("head"); //计算以下默认血条的距离,也可以写个常量,就是标记一下 Fomat =Vector3.Distance(Head.position,Camera.main.transform.position); }
voidUpdate() { //这里可以判断一下 如果位置没有变化就不要在赋值了 floatnewFomat=Fomat/Vector3.Distance(Head.position,Camera.main.transform.position); UI.position =WorldToUI(Head.position); //计算出血条的缩放比例 UI.localScale=Vector3.one *newFomat;
//测试代码,按下W S键前后移动角色 if(Input.GetKey(KeyCode.W)) Cube.Translate(Vector3.forward); if(Input.GetKey(KeyCode.S)) Cube.Translate(Vector3.back); }
//核心代码在这里把3D点换算成NGUI屏幕上的2D点。 publicstaticVector3 WorldToUI(Vector3 point) { Vector3 pt=Camera.main.WorldToScreenPoint(point); //我发现有时候UICamera.currentCamera 有时候currentCamera会取错,取的时候注意一下啊。 Vector3 ff= UICamera.currentCamera.ScreenToWorldPoint(pt); //UI的话Z轴 等于0 ff.z=0; returnff; } } |
再说一下,一般血条可能都是由多个UISprite组成,那么最好把这些Sprite都挂在同一个GameObject下面,这样只需要修正父对象,所以子对象的缩放都会正确。控制角色移动近一点的截图。

控制角色移动远一点的截图,你会发现血条在屏幕上的比例是不会变化的。

祝大家学习愉快,欢迎讨论,嘿嘿嘿嘿

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Le modèle MoE open source le plus puissant au monde est ici, avec des capacités chinoises comparables à celles du GPT-4, et le prix ne représente que près d'un pour cent de celui du GPT-4-Turbo.
May 07, 2024 pm 04:13 PM
Le modèle MoE open source le plus puissant au monde est ici, avec des capacités chinoises comparables à celles du GPT-4, et le prix ne représente que près d'un pour cent de celui du GPT-4-Turbo.
May 07, 2024 pm 04:13 PM
Imaginez un modèle d'intelligence artificielle qui non seulement a la capacité de surpasser l'informatique traditionnelle, mais qui permet également d'obtenir des performances plus efficaces à moindre coût. Ce n'est pas de la science-fiction, DeepSeek-V2[1], le modèle MoE open source le plus puissant au monde est ici. DeepSeek-V2 est un puissant mélange de modèle de langage d'experts (MoE) présentant les caractéristiques d'une formation économique et d'une inférence efficace. Il est constitué de 236B paramètres, dont 21B servent à activer chaque marqueur. Par rapport à DeepSeek67B, DeepSeek-V2 offre des performances plus élevées, tout en économisant 42,5 % des coûts de formation, en réduisant le cache KV de 93,3 % et en augmentant le débit de génération maximal à 5,76 fois. DeepSeek est une entreprise explorant l'intelligence artificielle générale
 Les captures d'écran de l'iPhone ne fonctionnent pas : comment y remédier
May 03, 2024 pm 09:16 PM
Les captures d'écran de l'iPhone ne fonctionnent pas : comment y remédier
May 03, 2024 pm 09:16 PM
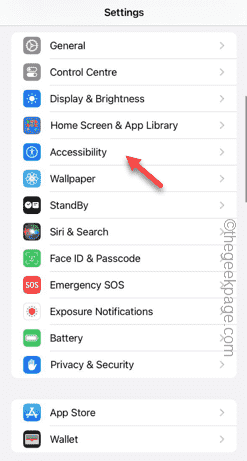
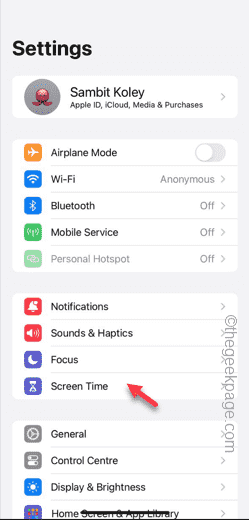
La fonction de capture d'écran ne fonctionne pas sur votre iPhone ? Prendre une capture d'écran est très simple car il vous suffit de maintenir enfoncés simultanément le bouton d'augmentation du volume et le bouton d'alimentation pour saisir l'écran de votre téléphone. Cependant, il existe d'autres moyens de capturer des images sur l'appareil. Correctif 1 – Utilisation d’Assistive Touch Prenez une capture d’écran à l’aide de la fonction Assistive Touch. Étape 1 – Accédez aux paramètres de votre téléphone. Étape 2 – Ensuite, appuyez pour ouvrir les paramètres d'accessibilité. Étape 3 – Ouvrez les paramètres Touch. Étape 4 – Ensuite, ouvrez les paramètres Assistive Touch. Étape 5 – Activez Assistive Touch sur votre téléphone. Étape 6 – Ouvrez « Personnaliser le menu supérieur » pour y accéder. Étape 7 – Il ne vous reste plus qu'à lier l'une de ces fonctions à votre capture d'écran. Alors cliquez sur le premier
 Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas entre officiellement dans l’ère des robots électriques ! Hier, l'Atlas hydraulique s'est retiré "en larmes" de la scène de l'histoire. Aujourd'hui, Boston Dynamics a annoncé que l'Atlas électrique était au travail. Il semble que dans le domaine des robots humanoïdes commerciaux, Boston Dynamics soit déterminé à concurrencer Tesla. Après la sortie de la nouvelle vidéo, elle a déjà été visionnée par plus d’un million de personnes en seulement dix heures. Les personnes âgées partent et de nouveaux rôles apparaissent. C'est une nécessité historique. Il ne fait aucun doute que cette année est l’année explosive des robots humanoïdes. Les internautes ont commenté : Les progrès des robots ont fait ressembler la cérémonie d'ouverture de cette année à des êtres humains, et le degré de liberté est bien plus grand que celui des humains. Mais n'est-ce vraiment pas un film d'horreur ? Au début de la vidéo, Atlas est allongé calmement sur le sol, apparemment sur le dos. Ce qui suit est à couper le souffle
 KAN, qui remplace MLP, a été étendu à la convolution par des projets open source
Jun 01, 2024 pm 10:03 PM
KAN, qui remplace MLP, a été étendu à la convolution par des projets open source
Jun 01, 2024 pm 10:03 PM
Plus tôt ce mois-ci, des chercheurs du MIT et d'autres institutions ont proposé une alternative très prometteuse au MLP – KAN. KAN surpasse MLP en termes de précision et d’interprétabilité. Et il peut surpasser le MLP fonctionnant avec un plus grand nombre de paramètres avec un très petit nombre de paramètres. Par exemple, les auteurs ont déclaré avoir utilisé KAN pour reproduire les résultats de DeepMind avec un réseau plus petit et un degré d'automatisation plus élevé. Plus précisément, le MLP de DeepMind compte environ 300 000 paramètres, tandis que le KAN n'en compte qu'environ 200. KAN a une base mathématique solide comme MLP est basé sur le théorème d'approximation universelle, tandis que KAN est basé sur le théorème de représentation de Kolmogorov-Arnold. Comme le montre la figure ci-dessous, KAN a
 Batterie négative au silicium de 6000 mAh ! La mise à niveau du Xiaomi 15Pro a encore fuité
Jul 24, 2024 pm 12:45 PM
Batterie négative au silicium de 6000 mAh ! La mise à niveau du Xiaomi 15Pro a encore fuité
Jul 24, 2024 pm 12:45 PM
Selon les informations du 23 juillet, le blogueur Digital Chat Station a annoncé que la capacité de la batterie du Xiaomi 15 Pro a été augmentée à 6 000 mAh et prend en charge une charge flash filaire de 90 W. Ce sera le modèle Pro avec la plus grande batterie de la série numérique de Xiaomi. Digital Chat Station a précédemment révélé que la batterie du Xiaomi 15Pro a une densité énergétique ultra-élevée et que la teneur en silicium est bien supérieure à celle des produits concurrents. Après que les batteries à base de silicium aient été testées à grande échelle en 2023, les batteries à anode en silicium de deuxième génération ont été identifiées comme l'orientation future du développement de l'industrie. Cette année marquera le pic de la concurrence directe. 1. La capacité théorique en grammes du silicium peut atteindre 4200 mAh/g, soit plus de 10 fois la capacité en grammes du graphite (la capacité théorique en grammes du graphite est de 372 mAh/g). Pour l'électrode négative, la capacité lorsque la quantité d'insertion d'ions lithium atteint le maximum est la capacité théorique en grammes, ce qui signifie que sous le même poids
 L'enregistrement d'écran devient noir : voici le correctif
May 03, 2024 pm 09:13 PM
L'enregistrement d'écran devient noir : voici le correctif
May 03, 2024 pm 09:13 PM
Essayez-vous d'enregistrer quelque chose sur l'écran de votre téléphone et celui-ci devient noir ? En règle générale, vous pouvez lancer l'enregistrement d'écran à partir du Control Center. Dans certains cas, vous ne pouvez pas enregistrer des éléments à l'écran. Nous avons mentionné tous les scénarios ainsi que la liste des solutions possibles qui peuvent vous aider à enregistrer correctement votre écran. Raisons pour lesquelles l'enregistrement d'écran devient noir – Si vous essayez d'enregistrer un contenu protégé par DRM (Digital Rights Management) pendant sa lecture sur l'écran de votre iPhone, vous n'obtiendrez rien. La sortie sera un écran noir absolu. Toutes les principales plates-formes OTT comme Netflix, Disney+, Hulu et Peacock disposent de ce DRM qui bloque toute fonctionnalité d'enregistrement d'écran. 2. Plusieurs sites Internet interdisent l’utilisation de la capture d’écran
 Les robots Tesla travaillent dans les usines, Musk : Le degré de liberté des mains atteindra 22 cette année !
May 06, 2024 pm 04:13 PM
Les robots Tesla travaillent dans les usines, Musk : Le degré de liberté des mains atteindra 22 cette année !
May 06, 2024 pm 04:13 PM
La dernière vidéo du robot Optimus de Tesla est sortie, et il peut déjà fonctionner en usine. À vitesse normale, il trie les batteries (les batteries 4680 de Tesla) comme ceci : Le responsable a également publié à quoi cela ressemble à une vitesse 20 fois supérieure - sur un petit "poste de travail", en sélectionnant et en sélectionnant et en sélectionnant : Cette fois, il est publié L'un des points forts de la vidéo est qu'Optimus réalise ce travail en usine, de manière totalement autonome, sans intervention humaine tout au long du processus. Et du point de vue d'Optimus, il peut également récupérer et placer la batterie tordue, en se concentrant sur la correction automatique des erreurs : concernant la main d'Optimus, le scientifique de NVIDIA Jim Fan a donné une évaluation élevée : la main d'Optimus est l'un des robots à cinq doigts du monde. le plus adroit. Ses mains ne sont pas seulement tactiles
 FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
La détection de cibles est un problème relativement mature dans les systèmes de conduite autonome, parmi lesquels la détection des piétons est l'un des premiers algorithmes à être déployés. Des recherches très complètes ont été menées dans la plupart des articles. Cependant, la perception de la distance à l’aide de caméras fisheye pour une vue panoramique est relativement moins étudiée. En raison de la distorsion radiale importante, la représentation standard du cadre de délimitation est difficile à mettre en œuvre dans les caméras fisheye. Pour alléger la description ci-dessus, nous explorons les conceptions étendues de boîtes englobantes, d'ellipses et de polygones généraux dans des représentations polaires/angulaires et définissons une métrique de segmentation d'instance mIOU pour analyser ces représentations. Le modèle fisheyeDetNet proposé avec une forme polygonale surpasse les autres modèles et atteint simultanément 49,5 % de mAP sur l'ensemble de données de la caméra fisheye Valeo pour la conduite autonome.
