

Schooner首席技术官John Busch:MySQL优化空间广阔 NoSQL革命仍

[CSDN专访专稿] 在日前举行的 VelocityChina2011(Web 性能和运维大会 ) 上, CSDN 记者有幸对话了 Schooner 公司创立者兼 CTO 的 JohnBusch 博士。 JohnBusch 长期关注于面向 Web 、云和企业级服务的高性能和高可用的大容量数据库。在创办 Schooner 之前, J
[CSDN专访专稿] 在日前举行的Velocity China 2011(Web性能和运维大会)上,CSDN记者有幸对话了Schooner公司创立者兼CTO的John Busch博士。John Busch长期关注于面向Web、云和企业级服务的高性能和高可用的大容量数据库。在创办Schooner之前,John Busch是Sun研究中心的计算机系统研究的主管,Diba的全球副总裁,Clarity软件的创建者,惠普计算机系统的研究主管。同时,John Busch也是UCLA的计算机博士,数学硕士,斯坦福大学的计算机硕士,并参加了斯坦福大学斯隆计划。他与另一位同伴创建的Schooner信息技术公司成立于2007年2月,主打产品之一就是加速MySQL数据库的工具——SchoonerSQL。

Schooner公司创立者兼CTO的John Busch博士 CSDN配图
在本次Velocity China 2011主题演讲上,John Busch的演讲内容可以概括为以下几点:1)利用基于InnoDB的同步数据复制,消除了数据丢失并提供了集群级别的数据一致性;2)如何进行自动的即时失效备援,从而保证了服务的具有99.999%的高可用性;3)同步数据复制的粒度和并发控制,高效的利用现有的存储技术和服务器,从而使性能和扩展性最大化;4)如何把现有的同步集群和并行异步数据复制技术紧密的结合在一起来实现关于广域网的自动失效备援和数据一致性。
在接受采访的时候,John Busch首先谈到了Schooner进军中国市场的原因,他认为中国未来会有全球最大、最复杂的数据库应用市场,但目前很多国内公司在充分挖掘、优化数据库和服务器性能方面遇到了问题,在如何实现数据库可用性、完整性、扩展性的最大化方面仍缺乏有效的手段,“很多问题正是Facebook、Amazon等大型互联网公司走过的弯路,我们看到了中间蕴藏的巨大机遇”。
MySQL数据库优化空间广阔
目前像淘宝这样的大型互联网网站内部关键任务数据库大规模采用了Oracle商用产品,在谈到MySQL在担当关键任务数据库的角色时,John Busch首先肯定了Oracle数据库的性能和成绩,但他认为很大原因在于过去业界缺乏可以取代Oracle的方案,考虑到昂贵的软件许可证费用、服务费等方面。其实,在保证稳定性的同时,通过数据库工具可以大幅度提升系统的可用性和性能并降低总体成本,越来越多的公司开始考虑其他的数据库替代解决方案。
他透露,在北美和欧洲,来自不同行业的许多公司已经在其生产环境中部署了SchoonerSQL解决方案,涉及电子商务、社交网络、电信、娱乐和游戏等众多行业。典型 的客户包括:eBay、Comcast、iStock Photo、Xoom、37Signals、CCP Games。British Telecom、Morningstar和GuteFrage等。
NoSQL革命仍需等待
此外,时下国内不少互联网公司例如百度、新浪等都在内部测试及局部试用NoSQL(非关系型数据库)项目,在谈到非关系型数据库对传统数据库的冲击时,John Busch认为,随着超大规模和高并发的SNS类型的Web2.0动态网站的崛起,例如Membase、MongoDB、Cassandra这样的非关系型数据库的确开始受到更多的关注。但John Busch并不认为NoSQL将完全取代传统数据库,NoSQL的革命仍然需要等待,更多方面还处在试验阶段,还没有哪家成熟的厂商来提供持续稳定的技术支持和服务工作,大多解决方案还是靠企业内部研发团队来实现,NoSQL自己还提供不了一系列的工具来提升数据库性能和可用性。Schooner正在跟新浪、百度、淘宝等企业一起合作来实行定制化的性能解决方案,而不是他们自己动用上百人的团队来开发NoSQL工具。
今年10月份的时候,Schooner刚在杭州宣布和浙江网新恒天公司启动战略合作,在中国市场推广其核心产品SchoonerSQL,并由网新恒天提供产品及支持服务。据悉,在此之前,Schooner和网新恒天已经建立了长达四年的深厚合作关系,目前双方已开始和国内一些行业领军企业洽谈,尝试通过SchoonerSQL为他们的后台数据平台提供高可用性:完全自动化和数据完整性、高扩展能力、高性能、高度的数据一致性和便捷的集群管理。

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
L'article de StableDiffusion3 est enfin là ! Ce modèle est sorti il y a deux semaines et utilise la même architecture DiT (DiffusionTransformer) que Sora. Il a fait beaucoup de bruit dès sa sortie. Par rapport à la version précédente, la qualité des images générées par StableDiffusion3 a été considérablement améliorée. Il prend désormais en charge les invites multithèmes, et l'effet d'écriture de texte a également été amélioré et les caractères tronqués n'apparaissent plus. StabilityAI a souligné que StableDiffusion3 est une série de modèles avec des tailles de paramètres allant de 800M à 8B. Cette plage de paramètres signifie que le modèle peut être exécuté directement sur de nombreux appareils portables, réduisant ainsi considérablement l'utilisation de l'IA.
 Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Le premier article pilote et clé présente principalement plusieurs systèmes de coordonnées couramment utilisés dans la technologie de conduite autonome, et comment compléter la corrélation et la conversion entre eux, et enfin construire un modèle d'environnement unifié. L'objectif ici est de comprendre la conversion du véhicule en corps rigide de caméra (paramètres externes), la conversion de caméra en image (paramètres internes) et la conversion d'image en unité de pixel. La conversion de 3D en 2D aura une distorsion, une traduction, etc. Points clés : Le système de coordonnées du véhicule et le système de coordonnées du corps de la caméra doivent être réécrits : le système de coordonnées planes et le système de coordonnées des pixels Difficulté : la distorsion de l'image doit être prise en compte. La dé-distorsion et l'ajout de distorsion sont compensés sur le plan de l'image. 2. Introduction Il existe quatre systèmes de vision au total : système de coordonnées du plan de pixels (u, v), système de coordonnées d'image (x, y), système de coordonnées de caméra () et système de coordonnées mondiales (). Il existe une relation entre chaque système de coordonnées,
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un rôle important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contrôle de la planification en aval. La tâche de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer ! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus tôt possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R : Regardez d’abord l’enquête, p
 DualBEV : dépassant largement BEVFormer et BEVDet4D, ouvrez le livre !
Mar 21, 2024 pm 05:21 PM
DualBEV : dépassant largement BEVFormer et BEVDet4D, ouvrez le livre !
Mar 21, 2024 pm 05:21 PM
Cet article explore le problème de la détection précise d'objets sous différents angles de vue (tels que la perspective et la vue à vol d'oiseau) dans la conduite autonome, en particulier comment transformer efficacement les caractéristiques de l'espace en perspective (PV) en vue à vol d'oiseau (BEV). implémenté via le module Visual Transformation (VT). Les méthodes existantes sont globalement divisées en deux stratégies : la conversion 2D en 3D et la conversion 3D en 2D. Les méthodes 2D vers 3D améliorent les caractéristiques 2D denses en prédisant les probabilités de profondeur, mais l'incertitude inhérente aux prévisions de profondeur, en particulier dans les régions éloignées, peut introduire des inexactitudes. Alors que les méthodes 3D vers 2D utilisent généralement des requêtes 3D pour échantillonner des fonctionnalités 2D et apprendre les poids d'attention de la correspondance entre les fonctionnalités 3D et 2D via un transformateur, ce qui augmente le temps de calcul et de déploiement.
 Le premier modèle mondial de génération de vidéos de scènes de conduite autonomes multi-vues DrivingDiffusion : nouvelles idées pour les données et la simulation BEV
Oct 23, 2023 am 11:13 AM
Le premier modèle mondial de génération de vidéos de scènes de conduite autonomes multi-vues DrivingDiffusion : nouvelles idées pour les données et la simulation BEV
Oct 23, 2023 am 11:13 AM
Quelques réflexions personnelles de l'auteur Dans le domaine de la conduite autonome, avec le développement de sous-tâches/solutions de bout en bout basées sur BEV, les données d'entraînement multi-vues de haute qualité et la construction de scènes de simulation correspondantes sont devenues de plus en plus importantes. En réponse aux problèmes des tâches actuelles, la « haute qualité » peut être divisée en trois aspects : des scénarios à longue traîne dans différentes dimensions : comme les véhicules à courte portée dans les données sur les obstacles et les angles de cap précis lors du découpage des voitures, et les données sur les lignes de voie. . Scènes telles que des courbes avec des courbures différentes ou des rampes/fusions/fusions difficiles à capturer. Celles-ci reposent souvent sur de grandes quantités de données collectées et sur des stratégies complexes d’exploration de données, qui sont coûteuses. Valeur réelle 3D - image hautement cohérente : l'acquisition actuelle des données BEV est souvent affectée par des erreurs d'installation/calibrage du capteur, des cartes de haute précision et l'algorithme de reconstruction lui-même. cela m'a amené à
 GSLAM | Une architecture générale et un benchmark
Oct 20, 2023 am 11:37 AM
GSLAM | Une architecture générale et un benchmark
Oct 20, 2023 am 11:37 AM
J'ai soudainement découvert un article vieux de 19 ans GSLAM : A General SLAM Framework and Benchmark open source code : https://github.com/zdzhaoyong/GSLAM Accédez directement au texte intégral et ressentez la qualité de ce travail ~ 1 Technologie SLAM abstraite a remporté de nombreux succès récemment et a attiré de nombreuses entreprises de haute technologie. Cependant, la question de savoir comment s'interfacer avec les algorithmes existants ou émergents pour effectuer efficacement des analyses comparatives en termes de vitesse, de robustesse et de portabilité reste une question. Dans cet article, une nouvelle plateforme SLAM appelée GSLAM est proposée, qui fournit non seulement des capacités d'évaluation, mais fournit également aux chercheurs un moyen utile de développer rapidement leurs propres systèmes SLAM.
 'Minecraft' se transforme en une ville IA et les habitants des PNJ jouent comme de vraies personnes
Jan 02, 2024 pm 06:25 PM
'Minecraft' se transforme en une ville IA et les habitants des PNJ jouent comme de vraies personnes
Jan 02, 2024 pm 06:25 PM
Veuillez noter que cet homme carré fronça les sourcils, pensant à l'identité des « invités non invités » devant lui. Il s’est avéré qu’elle se trouvait dans une situation dangereuse, et une fois qu’elle s’en est rendu compte, elle a rapidement commencé une recherche mentale pour trouver une stratégie pour résoudre le problème. Finalement, elle a décidé de fuir les lieux, de demander de l'aide le plus rapidement possible et d'agir immédiatement. En même temps, la personne de l'autre côté pensait la même chose qu'elle... Il y avait une telle scène dans "Minecraft" où tous les personnages étaient contrôlés par l'intelligence artificielle. Chacun d’eux a un cadre identitaire unique. Par exemple, la jeune fille mentionnée précédemment est une coursière de 17 ans mais intelligente et courageuse. Ils ont la capacité de se souvenir, de penser et de vivre comme des humains dans cette petite ville de Minecraft. Ce qui les anime est une toute nouvelle,
 Revoir! Fusion profonde de modèles (LLM/modèle de base/apprentissage fédéré/mise au point, etc.)
Apr 18, 2024 pm 09:43 PM
Revoir! Fusion profonde de modèles (LLM/modèle de base/apprentissage fédéré/mise au point, etc.)
Apr 18, 2024 pm 09:43 PM
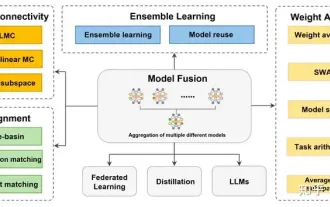
Le 23 septembre, l'article « DeepModelFusion:ASurvey » a été publié par l'Université nationale de technologie de la défense, JD.com et l'Institut de technologie de Pékin. La fusion/fusion de modèles profonds est une technologie émergente qui combine les paramètres ou les prédictions de plusieurs modèles d'apprentissage profond en un seul modèle. Il combine les capacités de différents modèles pour compenser les biais et les erreurs des modèles individuels pour de meilleures performances. La fusion profonde de modèles sur des modèles d'apprentissage profond à grande échelle (tels que le LLM et les modèles de base) est confrontée à certains défis, notamment un coût de calcul élevé, un espace de paramètres de grande dimension, l'interférence entre différents modèles hétérogènes, etc. Cet article divise les méthodes de fusion de modèles profonds existantes en quatre catégories : (1) « Connexion de modèles », qui relie les solutions dans l'espace de poids via un chemin de réduction des pertes pour obtenir une meilleure fusion de modèles initiale.
