

Titre original : DenserRadar : Un détecteur de nuages de points radar à ondes millimétriques 4D basé sur des nuages de points LiDAR denses
Lien papier : https://arxiv.org/pdf/2405.05131
Affiliation de l'auteur : Université Tsinghua

Le radar à ondes millimétriques 4D (mmWave), avec sa robustesse dans les environnements extrêmes, sa large plage de détection et sa capacité à mesurer la vitesse et l'altitude, s'est révélé utile dans les systèmes de conduite autonome confrontés à des situations extrêmes (coin- cas) a un potentiel important pour améliorer la perception. Cependant, la rareté et le bruit inhérents aux nuages de points radar à ondes millimétriques 4D limitent leur développement ultérieur et leurs applications pratiques. Cet article présente un nouveau détecteur de nuages de points radar à ondes millimétriques 4D qui exploite des nuages de points radar denses à haute résolution. Notre méthode construit une vérité terrestre dense en 3D dans l'espace occupé à partir de nuages de points LiDAR assemblés et utilise un réseau spécialement conçu nommé DenserRadar. La méthode proposée surpasse les détecteurs de nuages de points radar à ondes millimétriques basés sur les probabilités et l'apprentissage existants en termes de densité et de précision des nuages de points, obtenant ainsi de meilleurs résultats sur l'ensemble de données K-Radar.
Ce travail est le premier détecteur de nuages de points radar à ondes millimétriques 4D supervisé par une vérité terrestre dense de l'espace de données occupé en 3D, qui est générée par l'assemblage de nuages de points LiDAR multi-trames, augmentant ainsi densifié le millimètre détecté nuage de points radar à ondes.
Cet article propose un processus innovant de génération de vérité au sol dans un espace de données occupé en 3D sur la neige dense, ainsi que l'assemblage de nuages de points LiDAR denses de l'ensemble de données K-Radar. Ces nuages de points fournissent des vérités au sol complètes sur la scène et seront disponibles dès leur publication. de plus amples recherches.
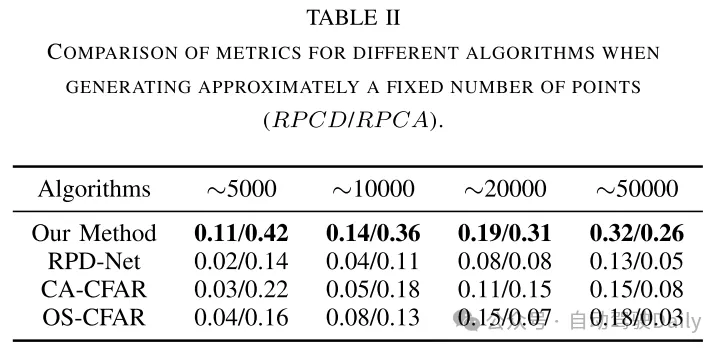
En raison de la conception spécialisée du réseau DenserRadar, l'algorithme de cet article est supérieur aux méthodes existantes de détection de nuages de points radar à ondes millimétriques de type CFAR et basées sur l'apprentissage en termes de densité et de précision des nuages de points.
La technologie de conduite autonome vise à offrir une expérience de transport sûre, pratique et confortable, et sa vitesse de développement est impressionnante. Pour parvenir à une conduite autonome de haut niveau, la capacité de percevoir et de positionner des environnements complexes est indispensable. Ainsi, les capteurs équipant les véhicules autonomes, notamment les caméras, le lidar (LiDAR) et le radar à ondes millimétriques, ainsi que leurs algorithmes associés, suscitent de plus en plus d’intérêt dans la recherche.
Compte tenu de ses avantages tels que sa taille compacte, sa rentabilité élevée, son adaptabilité par tous les temps, sa capacité de mesure de la vitesse et sa large plage de détection [1], le radar à ondes millimétriques (mmWave) a été largement utilisé dans le domaine de la conduite autonome. Les progrès récents dans la technologie des antennes à entrées multiples et sorties multiples (MIMO) ont encore amélioré la résolution en hauteur, permettant l'émergence du radar à ondes millimétriques 4D. Par conséquent, le radar à ondes millimétriques 4D est de plus en plus considéré comme une amélioration clé des capacités de perception et de positionnement dans la conduite autonome, en particulier dans les scènes difficiles telles que la pluie, la neige et le brouillard. Comme son nom l'indique, le radar à ondes millimétriques 4D peut mesurer quatre dimensions des informations sur la cible : la distance, l'azimut, l'altitude et la vitesse Doppler, offrant ainsi une solution de détection complète.
Cependant, la qualité des nuages de points radar à ondes millimétriques 4D est nettement en retard par rapport aux nuages de points lidar. Tout d’abord, les nuages de points radar à ondes millimétriques 4D présentent des problèmes de faible résolution, notamment dans la mesure d’angle. Cette limitation est principalement due à la configuration de l'antenne et à l'estimation de la direction d'arrivée (DOA) du radar mmWave [2]. Deuxièmement, les nuages de points radar à ondes millimétriques 4D sont beaucoup plus clairsemés que les nuages de points lidar. Troisièmement, en raison des effets de trajets multiples, des interférences de signaux et de la réflexion au sol, les nuages de points radar à ondes millimétriques 4D contiennent souvent un grand nombre de points parasites. Toutes ces lacunes entravent l’application du radar à ondes millimétriques 4D dans la conduite autonome.
La qualité des nuages de points radar à ondes millimétriques 4D n'est pas seulement limitée par le matériel, mais également par les algorithmes de traitement du signal [3]. En particulier, la détection de cibles réelles à partir de radargrammes ou de tenseurs bruts pour générer des nuages de points peut avoir un impact considérable sur la qualité. Traditionnellement, le détecteur de taux de fausses alarmes (CFAR) et ses variantes [4], [5] sont largement utilisés dans la détection de nuages de points radar à ondes millimétriques. Cependant, en tant qu'algorithme basé sur les probabilités, les détecteurs de type CFAR peuvent rencontrer des problèmes lors de la détection d'objets de différentes tailles car ces objets ne sont pas distribués de manière indépendante et identique [6], ce qui se produit souvent dans les scénarios de conduite autonome.
Pour résoudre les problèmes de qualité des nuages de points associés au radar à ondes millimétriques 4D, cet article propose un détecteur de nuages de points radar à ondes millimétriques 4D basé sur l'apprentissage, supervisé par des informations denses de vérité de terrain générées à partir de nuages de points lidar. Dans un premier temps, cet article assemble plusieurs images de nuages de points LiDAR prétraités pour générer une vérité terrain dense sur l'occupation 3D. Cet article présente ensuite le réseau DenserRadar, qui extrait les caractéristiques du tenseur radar à ondes millimétriques 4D d'origine et génère un nuage de points radar à ondes millimétriques 4D plus dense et plus précis. Le réseau utilise une fonction de perte hybride pondérée ainsi que d'autres éléments de conception nouveaux pour capturer des caractéristiques multi-résolution et générer des nuages de points avec une meilleure résolution que les techniques traditionnelles. Des expériences comparatives menées sur l'ensemble de données K-Radar [7] prouvent l'efficacité de cette méthode.
L'algorithme de cet article est présenté dans la figure 1. Tout d'abord, cet article conçoit un processus de génération de vérité terrain pour obtenir une vérité terrain dense en 3D dans l'espace occupé comme informations de supervision en épissant des données de nuages de points lidar multi-trames, puis établit le réseau DenserRadar, qui est chargé de générer des données à partir de l'onde millimétrique 4D d'origine. Détection de nuages de points radar à ondes millimétriques dans les données de tenseur radar.

Figure 1. Aperçu de l'ensemble de l'algorithme.

Figure 2. Organigramme de génération de valeurs de vérité.

Figure 4. Comparaison qualitative des nuages de points entre l'algorithme DenserRadar et l'algorithme CA-CFAR dans cet article, avec des images et des nuages de points réels en espace occupé 3D denses comme référence. Chaque flèche du diagramme représente une longueur de 10 mètres.


Cet article présente DenserRadar, un nouveau réseau de détection de nuages de points radar à ondes millimétriques 4D, et un processus innovant pour générer une vérité terrain dense. Les résultats expérimentaux et les études d'ablation démontrent l'efficacité de notre architecture de réseau et de notre méthodologie de génération de vérité terrain. Cette recherche a le potentiel d’améliorer les capacités de perception et de localisation des systèmes de conduite autonome, en particulier dans des scénarios extrêmes difficiles.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Nettoyer le registre
Nettoyer le registre
 Quelle est la touche de raccourci pour changer d'utilisateur ?
Quelle est la touche de raccourci pour changer d'utilisateur ?
 Quelles sont les performances de php8 ?
Quelles sont les performances de php8 ?
 utilisation de l'état d'affichage
utilisation de l'état d'affichage
 Comment utiliser la fonction de classement
Comment utiliser la fonction de classement
 La différence entre rom et bélier
La différence entre rom et bélier
 Introduction aux composants Laravel
Introduction aux composants Laravel
 Utilisation de && et || en langage C
Utilisation de && et || en langage C








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



