
 Périphériques technologiques
IA
Le premier au monde ! En examinant près de 400 documents, le laboratoire Pengcheng et le CUHK analysent en profondeur l'intelligence incarnée
Périphériques technologiques
IA
Le premier au monde ! En examinant près de 400 documents, le laboratoire Pengcheng et le CUHK analysent en profondeur l'intelligence incarnée
Le premier au monde ! En examinant près de 400 documents, le laboratoire Pengcheng et le CUHK analysent en profondeur l'intelligence incarnée


La rubrique AIxiv est une rubrique où ce site publie du contenu académique et technique. Au cours des dernières années, la rubrique AIxiv de ce site a reçu plus de 2 000 rapports, couvrant les meilleurs laboratoires des principales universités et entreprises du monde entier, favorisant efficacement les échanges et la diffusion académiques. Si vous souhaitez partager un excellent travail, n'hésitez pas à contribuer ou à nous contacter pour un rapport. Courriel de soumission : liyazhou@jiqizhixin.com ; zhaoyunfeng@jiqizhixin.com
robots incarnés et plates-formes de simulation incarnées
- 1. Le passé et le présent de l'intelligence incarnée
Plateforme de simulation incarnée
- Utiliser de grands modèles multimodaux pour comprendre les instructions d'abstraction et les diviser en une série de sous-tâches, puis les exécuter étape par étape. par étape ; (6)  Transfert du virtuel à la réalité
Transfert du virtuel à la réalité



L'« étoile du Nord » de la perception visuelle future » est un raisonnement visuel centré sur l'incarnation et intelligence sociale. Comme le montre la figure ci-dessous, au lieu de simplement reconnaître les objets dans les images, les agents dotés d'une perception incarnée doivent se déplacer dans le monde physique et interagir avec l'environnement, ce qui nécessite une compréhension plus approfondie de l'espace tridimensionnel et des environnements dynamiques. La perception incarnée nécessite des capacités de perception visuelle et de raisonnement, la compréhension des relations tridimensionnelles dans une scène, ainsi que la prévision et l'exécution de tâches complexes basées sur des informations visuelles. Cette revue introduit la perception visuelle active, la localisation visuelle 3D, la navigation linguistique visuelle, la perception non visuelle (capteurs tactiles), etc.

 6. Agent incarné
6. Agent incarné
8.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



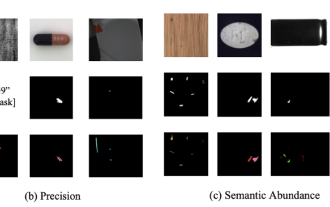 Repoussant les limites de la détection de défauts traditionnelle, « Defect Spectrum » permet pour la première fois une détection de défauts industriels d'une ultra haute précision et d'une sémantique riche.
Jul 26, 2024 pm 05:38 PM
Repoussant les limites de la détection de défauts traditionnelle, « Defect Spectrum » permet pour la première fois une détection de défauts industriels d'une ultra haute précision et d'une sémantique riche.
Jul 26, 2024 pm 05:38 PM
Dans la fabrication moderne, une détection précise des défauts est non seulement la clé pour garantir la qualité des produits, mais également la clé de l’amélioration de l’efficacité de la production. Cependant, les ensembles de données de détection de défauts existants manquent souvent de précision et de richesse sémantique requises pour les applications pratiques, ce qui rend les modèles incapables d'identifier des catégories ou des emplacements de défauts spécifiques. Afin de résoudre ce problème, une équipe de recherche de premier plan composée de l'Université des sciences et technologies de Hong Kong, Guangzhou et de Simou Technology a développé de manière innovante l'ensemble de données « DefectSpectrum », qui fournit une annotation à grande échelle détaillée et sémantiquement riche des défauts industriels. Comme le montre le tableau 1, par rapport à d'autres ensembles de données industrielles, l'ensemble de données « DefectSpectrum » fournit le plus grand nombre d'annotations de défauts (5 438 échantillons de défauts) et la classification de défauts la plus détaillée (125 catégories de défauts).
 Le modèle de dialogue NVIDIA ChatQA a évolué vers la version 2.0, avec la longueur du contexte mentionnée à 128 Ko
Jul 26, 2024 am 08:40 AM
Le modèle de dialogue NVIDIA ChatQA a évolué vers la version 2.0, avec la longueur du contexte mentionnée à 128 Ko
Jul 26, 2024 am 08:40 AM
La communauté ouverte LLM est une époque où une centaine de fleurs fleurissent et s'affrontent. Vous pouvez voir Llama-3-70B-Instruct, QWen2-72B-Instruct, Nemotron-4-340B-Instruct, Mixtral-8x22BInstruct-v0.1 et bien d'autres. excellents interprètes. Cependant, par rapport aux grands modèles propriétaires représentés par le GPT-4-Turbo, les modèles ouverts présentent encore des lacunes importantes dans de nombreux domaines. En plus des modèles généraux, certains modèles ouverts spécialisés dans des domaines clés ont été développés, tels que DeepSeek-Coder-V2 pour la programmation et les mathématiques, et InternVL pour les tâches de langage visuel.
 Formation avec des millions de données cristallines pour résoudre le problème de la phase cristallographique, la méthode d'apprentissage profond PhAI est publiée dans Science
Aug 08, 2024 pm 09:22 PM
Formation avec des millions de données cristallines pour résoudre le problème de la phase cristallographique, la méthode d'apprentissage profond PhAI est publiée dans Science
Aug 08, 2024 pm 09:22 PM
Editeur | KX À ce jour, les détails structurels et la précision déterminés par cristallographie, des métaux simples aux grandes protéines membranaires, sont inégalés par aucune autre méthode. Cependant, le plus grand défi, appelé problème de phase, reste la récupération des informations de phase à partir d'amplitudes déterminées expérimentalement. Des chercheurs de l'Université de Copenhague au Danemark ont développé une méthode d'apprentissage en profondeur appelée PhAI pour résoudre les problèmes de phase cristalline. Un réseau neuronal d'apprentissage en profondeur formé à l'aide de millions de structures cristallines artificielles et de leurs données de diffraction synthétique correspondantes peut générer des cartes précises de densité électronique. L'étude montre que cette méthode de solution structurelle ab initio basée sur l'apprentissage profond peut résoudre le problème de phase avec une résolution de seulement 2 Angströms, ce qui équivaut à seulement 10 à 20 % des données disponibles à la résolution atomique, alors que le calcul ab initio traditionnel
 Google AI a remporté la médaille d'argent de l'Olympiade mathématique de l'OMI, le modèle de raisonnement mathématique AlphaProof a été lancé et l'apprentissage par renforcement est de retour.
Jul 26, 2024 pm 02:40 PM
Google AI a remporté la médaille d'argent de l'Olympiade mathématique de l'OMI, le modèle de raisonnement mathématique AlphaProof a été lancé et l'apprentissage par renforcement est de retour.
Jul 26, 2024 pm 02:40 PM
Pour l’IA, l’Olympiade mathématique n’est plus un problème. Jeudi, l'intelligence artificielle de Google DeepMind a réalisé un exploit : utiliser l'IA pour résoudre la vraie question de l'Olympiade mathématique internationale de cette année, l'OMI, et elle n'était qu'à un pas de remporter la médaille d'or. Le concours de l'OMI qui vient de se terminer la semaine dernière comportait six questions portant sur l'algèbre, la combinatoire, la géométrie et la théorie des nombres. Le système d'IA hybride proposé par Google a répondu correctement à quatre questions et a marqué 28 points, atteignant le niveau de la médaille d'argent. Plus tôt ce mois-ci, le professeur titulaire de l'UCLA, Terence Tao, venait de promouvoir l'Olympiade mathématique de l'IA (AIMO Progress Award) avec un prix d'un million de dollars. De manière inattendue, le niveau de résolution de problèmes d'IA s'était amélioré à ce niveau avant juillet. Posez les questions simultanément sur l'OMI. La chose la plus difficile à faire correctement est l'OMI, qui a la plus longue histoire, la plus grande échelle et la plus négative.
 PRO | Pourquoi les grands modèles basés sur le MoE méritent-ils davantage d'attention ?
Aug 07, 2024 pm 07:08 PM
PRO | Pourquoi les grands modèles basés sur le MoE méritent-ils davantage d'attention ?
Aug 07, 2024 pm 07:08 PM
En 2023, presque tous les domaines de l’IA évoluent à une vitesse sans précédent. Dans le même temps, l’IA repousse constamment les limites technologiques de domaines clés tels que l’intelligence embarquée et la conduite autonome. Sous la tendance multimodale, le statut de Transformer en tant qu'architecture dominante des grands modèles d'IA sera-t-il ébranlé ? Pourquoi l'exploration de grands modèles basés sur l'architecture MoE (Mixture of Experts) est-elle devenue une nouvelle tendance dans l'industrie ? Les modèles de grande vision (LVM) peuvent-ils constituer une nouvelle avancée dans la vision générale ? ...Dans la newsletter des membres PRO 2023 de ce site publiée au cours des six derniers mois, nous avons sélectionné 10 interprétations spéciales qui fournissent une analyse approfondie des tendances technologiques et des changements industriels dans les domaines ci-dessus pour vous aider à atteindre vos objectifs dans le nouveau année. Cette interprétation provient de la Week50 2023
 Afin de fournir un nouveau système de référence et d'évaluation de questions-réponses scientifiques et complexes pour les grands modèles, l'UNSW, Argonne, l'Université de Chicago et d'autres institutions ont lancé conjointement le cadre SciQAG.
Jul 25, 2024 am 06:42 AM
Afin de fournir un nouveau système de référence et d'évaluation de questions-réponses scientifiques et complexes pour les grands modèles, l'UNSW, Argonne, l'Université de Chicago et d'autres institutions ont lancé conjointement le cadre SciQAG.
Jul 25, 2024 am 06:42 AM
L'ensemble de données ScienceAI Question Answering (QA) joue un rôle essentiel dans la promotion de la recherche sur le traitement du langage naturel (NLP). Des ensembles de données d'assurance qualité de haute qualité peuvent non seulement être utilisés pour affiner les modèles, mais également évaluer efficacement les capacités des grands modèles linguistiques (LLM), en particulier la capacité à comprendre et à raisonner sur les connaissances scientifiques. Bien qu’il existe actuellement de nombreux ensembles de données scientifiques d’assurance qualité couvrant la médecine, la chimie, la biologie et d’autres domaines, ces ensembles de données présentent encore certaines lacunes. Premièrement, le formulaire de données est relativement simple, et la plupart sont des questions à choix multiples. Elles sont faciles à évaluer, mais limitent la plage de sélection des réponses du modèle et ne peuvent pas tester pleinement la capacité du modèle à répondre aux questions scientifiques. En revanche, les questions et réponses ouvertes
 Épluchant des concombres et pliant des vêtements sur place, le robot de rasage autrefois populaire a de nouveau évolué, le cerveau intelligent incarné de Qiongche est là !
Jul 11, 2024 pm 12:42 PM
Épluchant des concombres et pliant des vêtements sur place, le robot de rasage autrefois populaire a de nouveau évolué, le cerveau intelligent incarné de Qiongche est là !
Jul 11, 2024 pm 12:42 PM
Le 4 juillet, lors de la Conférence mondiale sur l'intelligence artificielle 2024, la société d'intelligence incarnée Qiongche Intelligent Noematrix (stand n° : H1-A715) a annoncé le lancement de Qiongche Embodied Brain NoematrixBrain pour accélérer la mise en œuvre de modèles d'intelligence incarnée à grande échelle. Combiné avec le robot physique, Qiongche a démontré au public à bout portant dans un environnement complètement ouvert « plier des vêtements qui peuvent être pliés d'un simple coup » (liberté infinie de manipulation d'objets, compréhension d'objets complexes comparables à ceux des humains) et « peuvent être plié après découpe Des technologies révolutionnaires telles que « manger des épluchures de concombre » (opération de surface irrégulière, précision même au-delà du niveau humain), ainsi que des applications pratiques telles que le nettoyage des sols de la maison. Grâce à ces démonstrations en temps réel et à ces interactions réelles, le monde du cerveau incarné
 Le taux de précision atteint 60,8 %. Le modèle de prédiction de rétrosynthèse chimique de l'Université du Zhejiang basé sur Transformer a été publié dans la sous-journal Nature.
Aug 06, 2024 pm 07:34 PM
Le taux de précision atteint 60,8 %. Le modèle de prédiction de rétrosynthèse chimique de l'Université du Zhejiang basé sur Transformer a été publié dans la sous-journal Nature.
Aug 06, 2024 pm 07:34 PM
Editeur | KX La rétrosynthèse est une tâche essentielle dans la découverte de médicaments et la synthèse organique, et l'IA est de plus en plus utilisée pour accélérer le processus. Les méthodes d’IA existantes ont des performances insatisfaisantes et une diversité limitée. En pratique, les réactions chimiques provoquent souvent des modifications moléculaires locales, avec un chevauchement considérable entre les réactifs et les produits. Inspirée par cela, l'équipe de Hou Tingjun de l'Université du Zhejiang a proposé de redéfinir la prédiction rétrosynthétique en une seule étape en tant que tâche d'édition de chaînes moléculaires, en affinant de manière itérative la chaîne moléculaire cible pour générer des composés précurseurs. Et un modèle rétrosynthétique basé sur l'édition, EditRetro, est proposé, qui permet d'obtenir des prédictions diverses et de haute qualité. Des expériences approfondies montrent que le modèle atteint d'excellentes performances sur l'ensemble de données de référence standard USPTO-50 K, avec une précision top 1 de 60,8 %.
