

Chemin avec probabilité maximale

1514. Chemin avec probabilité maximale
Difficulté :Moyen
Sujets : Tableau, graphique, tas (file d'attente prioritaire), chemin le plus court
Vous recevez un graphe pondéré non orienté de n nœuds (indexés 0), représenté par une liste d'arêtes où edge[i] = [a, b] est une arête non orientée reliant les nœuds a et b avec une probabilité de succès de traverser ce bord succProb[i].
Étant donné le début et la fin de deux nœuds, trouver le chemin avec la probabilité maximale de succès pour aller du début à la fin et renvoyer sa probabilité de succès.
S'il n'y a pas de chemin du début à la fin, renvoie 0. Votre réponse sera acceptée si elle diffère de la bonne réponse d'au plus 1e-5.
Exemple 1 :
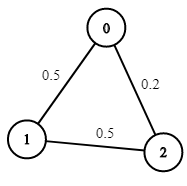
- Entrée : n = 3, bords = [[0,1],[1,2],[0,2]], succProb = [0.5,0.5,0.2], début = 0, fin = 2
- Sortie : 0,25000
- Explication : Il existe deux chemins du début à la fin, l'un ayant une probabilité de succès = 0,2 et l'autre a 0,5 * 0,5 = 0,25.
Exemple 2 :
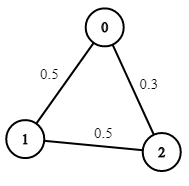
- Entrée : n = 3, bords = [[0,1],[1,2],[0,2]], succProb = [0.5,0.5,0.3], début = 0, fin = 2
- Sortie : 0,30000
Exemple 3 :
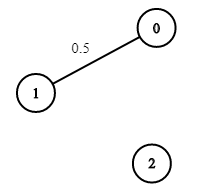
- Entrée : n = 3, bords = [[0,1]], succProb = [0.5], début = 0, fin = 2
- Sortie : 0,00000
- Explication : Il n'y a pas de chemin entre 0 et 2.
Contraintes :
- 2 <= n <= 10^4
- 0 <= début, fin < n
- début != fin
- 0 <= a, b < n
- a != b
- 0 <= succProb.length == bords.length <= 2*10^4
- 0 <= succProb[i] <= 1
- Il y a au plus une arête entre deux nœuds
Indice :
- Multiplier les probabilités entraînera des erreurs de précision.
- Prenez les probabilités du journal pour résumer les nombres au lieu de les multiplier.
- Utilisez l'algorithme de Dijkstra pour trouver le chemin minimum entre les deux nœuds après avoir annulé tous les coûts.
Solution :
Nous pouvons utiliser une version modifiée de l'algorithme de Dijkstra. Au lieu de trouver le chemin le plus court, vous maximiserez les chances de succès.
Implémentons cette solution en PHP : 1514. Chemin avec probabilité maximale
<?php
/**
* @param Integer $n
* @param Integer[][] $edges
* @param Float[] $succProb
* @param Integer $start_node
* @param Integer $end_node
* @return Float
*/
function maxProbability($n, $edges, $succProb, $start_node, $end_node) {
...
...
...
/**
* go to ./solution.php
*/
}
// Example usage:
$n1 = 3;
$edges1 = [[0,1],[1,2],[0,2]];
$succProb1 = [0.5,0.5,0.2];
$start_node1 = 0;
$end_node1 = 2;
echo maxProbability($n1, $edges1, $succProb1, $start_node1, $end_node1);//Output: 0.25000
$n2 = 3;
$edges2 = [[0,1],[1,2],[0,2]];
$succProb2 = [0.5,0.5,0.3];
$start_node2 = 0;
$end_node2 = 2;
echo maxProbability($n2, $edges2, $succProb2, $start_node2, $end_node2);//Output: 0.30000
$n3 = 3;
$edges3 = [[0,1]];
$succProb3 = [0.5;
$start_node3 = 0;
$end_node3 = 2;
echo maxProbability($n3, $edges3, $succProb3, $start_node3, $end_node3); //Output: 0.00000
?>
<h3>
Explication:
</h3>
<ol>
<li><p><strong>Représentation graphique</strong> : Le graphique est représenté comme une liste de contiguïté où chaque nœud pointe vers ses voisins ainsi que les probabilités de succès des arêtes qui les relient.</p></li>
<li><p><strong>Tableau de probabilité maximale</strong> : Un tableau maxProb est utilisé pour stocker la probabilité maximale d'atteindre chaque nœud à partir du nœud de départ.</p></li>
<li><p><strong>File d'attente prioritaire</strong> : Un tas maximum (SplPriorityQueue) est utilisé pour explorer en premier les chemins avec la probabilité la plus élevée. Ceci est crucial pour garantir que lorsque nous atteignons le nœud de destination, nous avons trouvé le chemin avec la probabilité maximale.</p></li>
<li>
<p><strong>Algorithme</strong> :</p>
<ul>
<li>Initialisez la probabilité du nœud de départ à 1 (puisque la probabilité de rester au départ est de 1).</li>
<li>Utilisez la file d'attente prioritaire pour explorer les nœuds, en mettant à jour la probabilité maximale d'atteindre chaque voisin.</li>
<li>Si le nœud de destination est atteint, renvoie la probabilité.</li>
<li>Si aucun chemin n'existe, renvoie 0.</li>
</ul>
</li>
</ol>
<h3>
Sortir:
</h3>
<p>Pour l'exemple fourni :<br>
</p>
<pre class="brush:php;toolbar:false">$n = 3;
$edges = [[0,1],[1,2],[0,2]];
$succProb = [0.5,0.5,0.2];
$start_node = 0;
$end_node = 2;
La sortie sera de 0,25.
Cette approche garantit une solution efficace utilisant l'algorithme de Dijkstra tout en gérant les spécificités des calculs de probabilité.
Liens de contact
Si vous avez trouvé cette série utile, pensez à donner une étoile au référentiel sur GitHub ou à partager la publication sur vos réseaux sociaux préférés ?. Votre soutien signifierait beaucoup pour moi !
Si vous souhaitez du contenu plus utile comme celui-ci, n'hésitez pas à me suivre :
- GitHub
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds
 1670
1670
 14
1428
52
1329
25
1276
29
1256
24
14
1428
52
1329
25
1276
29
1256
24

 Expliquez le hachage de mot de passe sécurisé dans PHP (par exemple, Password_Hash, Password_verify). Pourquoi ne pas utiliser MD5 ou SHA1?
Apr 17, 2025 am 12:06 AM
Expliquez le hachage de mot de passe sécurisé dans PHP (par exemple, Password_Hash, Password_verify). Pourquoi ne pas utiliser MD5 ou SHA1?
Apr 17, 2025 am 12:06 AM
Dans PHP, Password_Hash et Password_verify Les fonctions doivent être utilisées pour implémenter le hachage de mot de passe sécurisé, et MD5 ou SHA1 ne doit pas être utilisé. 1) Password_hash génère un hachage contenant des valeurs de sel pour améliorer la sécurité. 2) Password_verify Vérifiez le mot de passe et assurez-vous la sécurité en comparant les valeurs de hachage. 3) MD5 et SHA1 sont vulnérables et manquent de valeurs de sel, et ne conviennent pas à la sécurité de mot de passe moderne.
 PHP et Python: comparaison de deux langages de programmation populaires
Apr 14, 2025 am 12:13 AM
PHP et Python: comparaison de deux langages de programmation populaires
Apr 14, 2025 am 12:13 AM
PHP et Python ont chacun leurs propres avantages et choisissent en fonction des exigences du projet. 1.Php convient au développement Web, en particulier pour le développement rapide et la maintenance des sites Web. 2. Python convient à la science des données, à l'apprentissage automatique et à l'intelligence artificielle, avec syntaxe concise et adaptée aux débutants.
 PHP en action: Exemples et applications du monde réel
Apr 14, 2025 am 12:19 AM
PHP en action: Exemples et applications du monde réel
Apr 14, 2025 am 12:19 AM
PHP est largement utilisé dans le commerce électronique, les systèmes de gestion de contenu et le développement d'API. 1) E-commerce: Utilisé pour la fonction de panier et le traitement des paiements. 2) Système de gestion du contenu: utilisé pour la génération de contenu dynamique et la gestion des utilisateurs. 3) Développement des API: Utilisé pour le développement de l'API RESTful et la sécurité de l'API. Grâce à l'optimisation des performances et aux meilleures pratiques, l'efficacité et la maintenabilité des applications PHP sont améliorées.
 Comment fonctionne la résistance au type PHP, y compris les types scalaires, les types de retour, les types d'union et les types nullables?
Apr 17, 2025 am 12:25 AM
Comment fonctionne la résistance au type PHP, y compris les types scalaires, les types de retour, les types d'union et les types nullables?
Apr 17, 2025 am 12:25 AM
Le type PHP invite à améliorer la qualité et la lisibilité du code. 1) Conseils de type scalaire: Depuis PHP7.0, les types de données de base sont autorisés à être spécifiés dans les paramètres de fonction, tels que INT, Float, etc. 2) Invite de type de retour: Assurez la cohérence du type de valeur de retour de fonction. 3) Invite de type d'union: Depuis PHP8.0, plusieurs types peuvent être spécifiés dans les paramètres de fonction ou les valeurs de retour. 4) Invite de type nullable: permet d'inclure des valeurs nulles et de gérer les fonctions qui peuvent renvoyer les valeurs nulles.
 La pertinence durable de PHP: est-elle toujours vivante?
Apr 14, 2025 am 12:12 AM
La pertinence durable de PHP: est-elle toujours vivante?
Apr 14, 2025 am 12:12 AM
PHP est toujours dynamique et occupe toujours une position importante dans le domaine de la programmation moderne. 1) La simplicité de PHP et le soutien communautaire puissant le rendent largement utilisé dans le développement Web; 2) sa flexibilité et sa stabilité le rendent exceptionnelle dans la gestion des formulaires Web, des opérations de base de données et du traitement de fichiers; 3) PHP évolue et optimise constamment, adapté aux débutants et aux développeurs expérimentés.
 PHP et Python: différents paradigmes expliqués
Apr 18, 2025 am 12:26 AM
PHP et Python: différents paradigmes expliqués
Apr 18, 2025 am 12:26 AM
PHP est principalement la programmation procédurale, mais prend également en charge la programmation orientée objet (POO); Python prend en charge une variété de paradigmes, y compris la POO, la programmation fonctionnelle et procédurale. PHP convient au développement Web, et Python convient à une variété d'applications telles que l'analyse des données et l'apprentissage automatique.
 Comment empêchez-vous l'injection SQL en PHP? (Déclarations préparées, APD)
Apr 15, 2025 am 12:15 AM
Comment empêchez-vous l'injection SQL en PHP? (Déclarations préparées, APD)
Apr 15, 2025 am 12:15 AM
L'utilisation de déclarations de prétraitement et l'APD dans PHP peut effectivement empêcher les attaques d'injection SQL. 1) Utilisez PDO pour vous connecter à la base de données et définir le mode d'erreur. 2) Créez des instructions de prétraitement via la méthode de préparation et transmettez des données à l'aide des espaces réservés et exécutez des méthodes. 3) Traitez les résultats de la requête et assurez la sécurité et les performances du code.
 PHP et Python: exemples de code et comparaison
Apr 15, 2025 am 12:07 AM
PHP et Python: exemples de code et comparaison
Apr 15, 2025 am 12:07 AM
PHP et Python ont leurs propres avantages et inconvénients, et le choix dépend des besoins du projet et des préférences personnelles. 1.Php convient au développement rapide et à la maintenance des applications Web à grande échelle. 2. Python domine le domaine de la science des données et de l'apprentissage automatique.
