
 Périphériques technologiques
IA
Est-il difficile pour un robot de maîtriser la force de ses mains et d'effectuer le ménage en toute sécurité ? Le vice-président de l'intelligence artificielle de 1X rédige une explication détaillée
Périphériques technologiques
IA
Est-il difficile pour un robot de maîtriser la force de ses mains et d'effectuer le ménage en toute sécurité ? Le vice-président de l'intelligence artificielle de 1X rédige une explication détaillée
Est-il difficile pour un robot de maîtriser la force de ses mains et d'effectuer le ménage en toute sécurité ? Le vice-président de l'intelligence artificielle de 1X rédige une explication détaillée



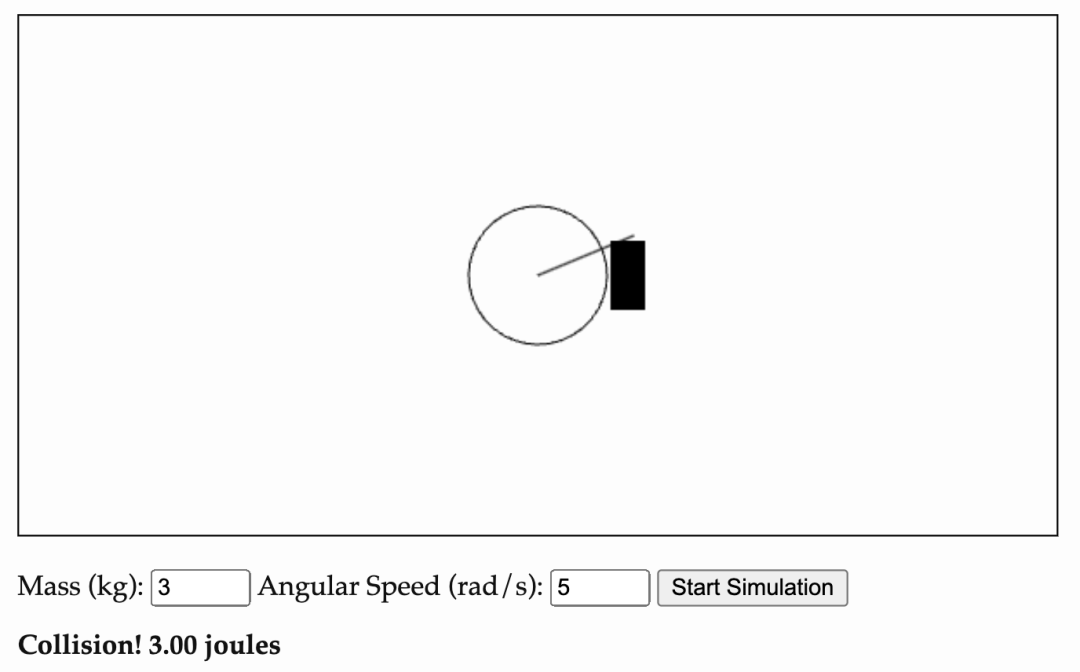
 , où I est le moment d'inertie et ω est la vitesse angulaire. Le levier étant supposé dépourvu de masse, l'inertie du système est équivalente à celle d'un cylindre fixe :
, où I est le moment d'inertie et ω est la vitesse angulaire. Le levier étant supposé dépourvu de masse, l'inertie du système est équivalente à celle d'un cylindre fixe :  . Brancher les valeurs donne I = 0,24 kg⋅m^2. Par conséquent, l’énergie cinétique de rotation de ce système peut être calculée à 3 Joules.
. Brancher les valeurs donne I = 0,24 kg⋅m^2. Par conséquent, l’énergie cinétique de rotation de ce système peut être calculée à 3 Joules. 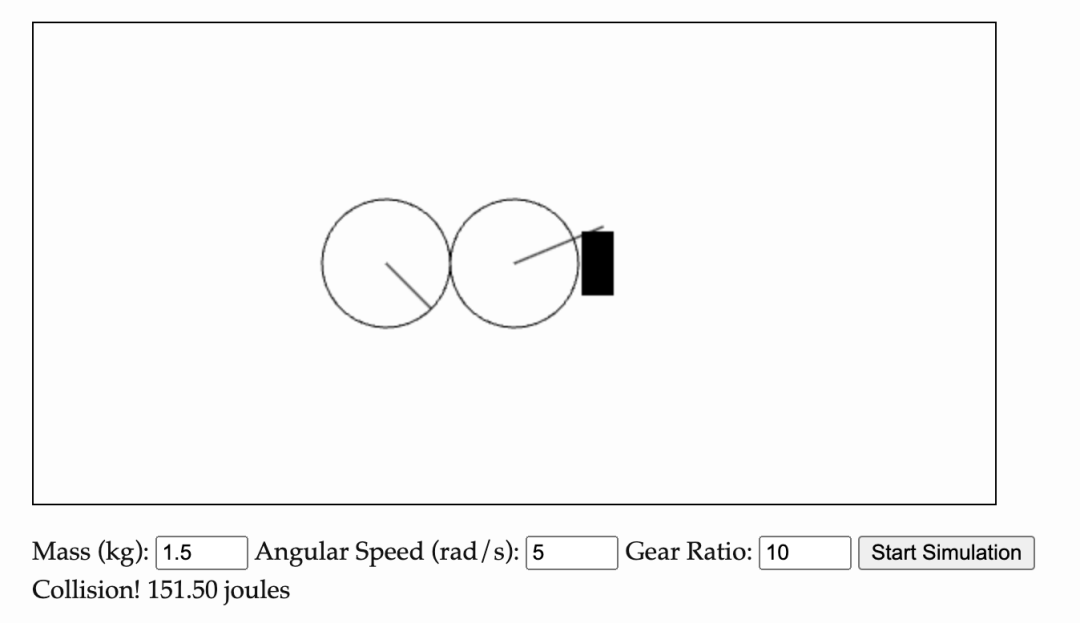

Alasannya ialah kotak gear memberikan leverage mekanikal yang kritikal: banyak motor tidak dapat memberikan tork yang mencukupi apabila bekerja sendiri, jadi jurutera memasang gear pada motor berkelajuan tinggi dikorbankan untuk tork yang diperlukan.
Sistem gear jenis ini adalah "tegar" dan tidak boleh "didorong secara undur". Pusing balik. Jadi pada hujung kotak gear yang lain, lebih banyak daya perlu dikenakan untuk menahan daya putaran yang dihasilkan oleh motor berkelajuan tinggi.
Berdasarkan pertimbangan di atas, 1X Technologies telah komited untuk mengeluarkan tork tinggi, motor berkelajuan rendah selama sepuluh tahun yang lalu untuk memaksimumkan keselamatan sistem transmisi. Terima kasih kepada sistem motor dan pemacu yang digunakan oleh robot NEO dengan nisbah gear yang lebih kecil dan berat yang lebih ringan, ia telah menjadi robot domestik pertama yang boleh disepadukan dengan selamat ke dalam persekitaran rumah.
1 kemajuan robot umum. Perkakasan robot adalah mahal, dan mengupah pengendali jauh manusia untuk melaksanakan tugas menggunakan perkakasan besar adalah sama mahal. Selain itu, kecekapan operasi jauh adalah sangat rendah, jauh lebih rendah daripada kelajuan di mana manusia boleh menyelesaikan tugas secara langsung.
2. Jika kita mengikat kamera yang dipasang di kepala kepada orang ramai dan menyuruh mereka memakai sarung tangan getah besar yang menutupi badan mereka, kita boleh dengan cepat mengumpul kumpulan data besar orang yang melakukan pelbagai kerja. dan tugasan. Orang biasa secara tidak sedar menyelesaikan sejumlah besar tindakan dan tugas operasi yang berbeza dalam kehidupan seharian mereka. Walaupun terdapat kesukaran untuk melihat secara langsung output gerakan mentah, kita boleh membuat kesimpulan tindakan dengan menganalisis perubahan pose dalam video. Pengumpulan data jenis ini boleh membantu memecahkan halangan kepada pembangunan robot tujuan umum sehingga perkakasan yang lebih maju tersedia.
3 Terdapat banyak video orang pertama dan orang ketiga di Internet, yang boleh melatih robot untuk mengenali dan mempelajari pelbagai aktiviti yang dilakukan orang dalam video, dengan itu berkembang lagi. saiz Data kami.
Sebelum menskalakan pengumpulan data jenis ini, penting juga untuk ambil perhatian bahawa tiada bahagian yang berputar cepat di dalam badan kita Berbanding dengan motor yang berputar pada 5000 RPM , tenaga kinetik otot Sangat rendah, jisim berkesan yang kita bawa semasa bergerak juga jauh lebih kecil, jadi anda akan mendapati bahawa walaupun sudut sendi robot mungkin lebih kurang sama dengan manusia, jisim berkesan yang disediakan oleh motor berputarnya mungkin terlalu besar untuk melaksanakan tugas dengan cekap.
Walaupun kita membangunkan strategi kawalan gerakan yang cekap, robot masih tidak dapat mencapai kelajuan dan kelancaran manusia apabila melakukan tindakan seperti menghidupkan dan mematikan lampu dengan mudah atau berjalan dengan anggun. Ini kerana daya yang dikenakan oleh robot apabila menyentuh objek adalah berbeza dengan ketara daripada manusia.
Jadi, jika anda ingin menukar video manusia dengan cepat kepada strategi pergerakan robot, anda memerlukan kaedah berikut:
1. Robot yang sangat patuh dan fleksibel seperti NEO
2 Biarkan robot menjejaki trajektori gerakan video pada kelajuan lebih perlahan daripada 1x, bukannya menyalin terus " ". Dinamik Perkakasan Manusia. Walau bagaimanapun, ini hanya sesuai untuk tugas operasi statik, dan tidak sesuai untuk tugas yang memerlukan sentuhan dengan banyak objek, seperti melipat pakaian dan menyediakan makanan di dapur.
3. Asingkan perancangan gerakan dan perancangan dinamik, membolehkan perancangan gerakan memberi tumpuan untuk mencapai kedudukan sasaran, manakala perancangan dinamik memfokuskan pada mengawal daya apabila perlanggaran berlaku.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds
 1667
1667
 14
1426
52
1328
25
1273
29
1255
24
14
1426
52
1328
25
1273
29
1255
24

 Le robot DeepMind joue au tennis de table, et son coup droit et son revers glissent dans les airs, battant complètement les débutants humains
Aug 09, 2024 pm 04:01 PM
Le robot DeepMind joue au tennis de table, et son coup droit et son revers glissent dans les airs, battant complètement les débutants humains
Aug 09, 2024 pm 04:01 PM
Mais peut-être qu’il ne pourra pas vaincre le vieil homme dans le parc ? Les Jeux Olympiques de Paris battent leur plein et le tennis de table suscite beaucoup d'intérêt. Dans le même temps, les robots ont également réalisé de nouvelles avancées dans le domaine du tennis de table. DeepMind vient tout juste de proposer le premier agent robot apprenant capable d'atteindre le niveau des joueurs amateurs humains de tennis de table de compétition. Adresse papier : https://arxiv.org/pdf/2408.03906 Quelle est la capacité du robot DeepMind à jouer au tennis de table ? Probablement à égalité avec les joueurs amateurs humains : tant en coup droit qu'en revers : l'adversaire utilise une variété de styles de jeu, et le robot peut également résister : recevoir des services avec des tours différents : Cependant, l'intensité du jeu ne semble pas aussi intense que le vieil homme dans le parc. Pour les robots, le tennis de table
 La première griffe mécanique ! Yuanluobao est apparu à la World Robot Conference 2024 et a lancé le premier robot d'échecs pouvant entrer dans la maison
Aug 21, 2024 pm 07:33 PM
La première griffe mécanique ! Yuanluobao est apparu à la World Robot Conference 2024 et a lancé le premier robot d'échecs pouvant entrer dans la maison
Aug 21, 2024 pm 07:33 PM
Le 21 août, la Conférence mondiale sur les robots 2024 s'est tenue en grande pompe à Pékin. La marque de robots domestiques de SenseTime, "Yuanluobot SenseRobot", a dévoilé toute sa famille de produits et a récemment lancé le robot de jeu d'échecs Yuanluobot AI - Chess Professional Edition (ci-après dénommé "Yuanluobot SenseRobot"), devenant ainsi le premier robot d'échecs au monde pour le maison. En tant que troisième produit robot jouant aux échecs de Yuanluobo, le nouveau robot Guoxiang a subi un grand nombre de mises à niveau techniques spéciales et d'innovations en matière d'IA et de machines d'ingénierie. Pour la première fois, il a réalisé la capacité de ramasser des pièces d'échecs en trois dimensions. grâce à des griffes mécaniques sur un robot domestique et effectuer des fonctions homme-machine telles que jouer aux échecs, tout le monde joue aux échecs, réviser la notation, etc.
 Claude aussi est devenu paresseux ! Internaute : apprenez à vous accorder des vacances
Sep 02, 2024 pm 01:56 PM
Claude aussi est devenu paresseux ! Internaute : apprenez à vous accorder des vacances
Sep 02, 2024 pm 01:56 PM
La rentrée scolaire est sur le point de commencer, et ce ne sont pas seulement les étudiants qui sont sur le point de commencer le nouveau semestre qui doivent prendre soin d’eux-mêmes, mais aussi les grands modèles d’IA. Il y a quelque temps, Reddit était rempli d'internautes se plaignant de la paresse de Claude. « Son niveau a beaucoup baissé, il fait souvent des pauses et même la sortie devient très courte. Au cours de la première semaine de sortie, il pouvait traduire un document complet de 4 pages à la fois, mais maintenant il ne peut même plus produire une demi-page. !" https://www.reddit.com/r/ClaudeAI/comments/1by8rw8/something_just_feels_wrong_with_claude_in_the/ dans un post intitulé "Totalement déçu par Claude", plein de
 Lors de la World Robot Conference, ce robot domestique porteur de « l'espoir des futurs soins aux personnes âgées » a été entouré
Aug 22, 2024 pm 10:35 PM
Lors de la World Robot Conference, ce robot domestique porteur de « l'espoir des futurs soins aux personnes âgées » a été entouré
Aug 22, 2024 pm 10:35 PM
Lors de la World Robot Conference qui se tient à Pékin, l'exposition de robots humanoïdes est devenue le centre absolu de la scène. Sur le stand Stardust Intelligent, l'assistant robot IA S1 a réalisé trois performances majeures de dulcimer, d'arts martiaux et de calligraphie. un espace d'exposition, capable à la fois d'arts littéraires et martiaux, a attiré un grand nombre de publics professionnels et de médias. Le jeu élégant sur les cordes élastiques permet au S1 de démontrer un fonctionnement fin et un contrôle absolu avec vitesse, force et précision. CCTV News a réalisé un reportage spécial sur l'apprentissage par imitation et le contrôle intelligent derrière "Calligraphy". Le fondateur de la société, Lai Jie, a expliqué que derrière les mouvements soyeux, le côté matériel recherche le meilleur contrôle de la force et les indicateurs corporels les plus humains (vitesse, charge). etc.), mais du côté de l'IA, les données réelles de mouvement des personnes sont collectées, permettant au robot de devenir plus fort lorsqu'il rencontre une situation forte et d'apprendre à évoluer rapidement. Et agile
 Annonce des prix ACL 2024 : l'un des meilleurs articles sur le déchiffrement Oracle par HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Annonce des prix ACL 2024 : l'un des meilleurs articles sur le déchiffrement Oracle par HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Les contributeurs ont beaucoup gagné de cette conférence ACL. L'ACL2024, d'une durée de six jours, se tient à Bangkok, en Thaïlande. ACL est la plus grande conférence internationale dans le domaine de la linguistique informatique et du traitement du langage naturel. Elle est organisée par l'Association internationale pour la linguistique informatique et a lieu chaque année. L'ACL s'est toujours classée première en termes d'influence académique dans le domaine de la PNL, et c'est également une conférence recommandée par le CCF-A. La conférence ACL de cette année est la 62e et a reçu plus de 400 travaux de pointe dans le domaine de la PNL. Hier après-midi, la conférence a annoncé le meilleur article et d'autres récompenses. Cette fois, il y a 7 Best Paper Awards (deux inédits), 1 Best Theme Paper Award et 35 Outstanding Paper Awards. La conférence a également décerné 3 Resource Paper Awards (ResourceAward) et Social Impact Award (
 1X Technologies annonce que son humanoïde bipède Neo est sur le point de prendre en charge les tâches ménagères
Sep 07, 2024 pm 03:31 PM
1X Technologies annonce que son humanoïde bipède Neo est sur le point de prendre en charge les tâches ménagères
Sep 07, 2024 pm 03:31 PM
1X Technologies a annoncé que le robot humanoïde bipède Neo entrerait en test bêta dans certains foyers cette année après son dévoilement précédent. Contrairement à leur premier robot humanoïde, Eve, qui roulait sur roues, Neo se promène comme un humain sur un véhicule robotique.
 L'équipe de Li Feifei a proposé ReKep pour donner aux robots une intelligence spatiale et intégrer GPT-4o
Sep 03, 2024 pm 05:18 PM
L'équipe de Li Feifei a proposé ReKep pour donner aux robots une intelligence spatiale et intégrer GPT-4o
Sep 03, 2024 pm 05:18 PM
Intégration profonde de la vision et de l'apprentissage des robots. Lorsque deux mains de robot travaillent ensemble en douceur pour plier des vêtements, verser du thé et emballer des chaussures, associées au robot humanoïde 1X NEO qui a fait la une des journaux récemment, vous pouvez avoir le sentiment : nous semblons entrer dans l'ère des robots. En fait, ces mouvements soyeux sont le produit d’une technologie robotique avancée + d’une conception de cadre exquise + de grands modèles multimodaux. Nous savons que les robots utiles nécessitent souvent des interactions complexes et exquises avec l’environnement, et que l’environnement peut être représenté comme des contraintes dans les domaines spatial et temporel. Par exemple, si vous souhaitez qu'un robot verse du thé, le robot doit d'abord saisir la poignée de la théière et la maintenir verticalement sans renverser le thé, puis la déplacer doucement jusqu'à ce que l'embouchure de la théière soit alignée avec l'embouchure de la tasse. , puis inclinez la théière selon un certain angle. ce
 Conférence sur l'intelligence artificielle distribuée Appel à communications DAI 2024 : Agent Day, Richard Sutton, le père de l'apprentissage par renforcement, sera présent ! Yan Shuicheng, Sergey Levine et les scientifiques de DeepMind prononceront des discours d'ouverture
Aug 22, 2024 pm 08:02 PM
Conférence sur l'intelligence artificielle distribuée Appel à communications DAI 2024 : Agent Day, Richard Sutton, le père de l'apprentissage par renforcement, sera présent ! Yan Shuicheng, Sergey Levine et les scientifiques de DeepMind prononceront des discours d'ouverture
Aug 22, 2024 pm 08:02 PM
Introduction à la conférence Avec le développement rapide de la science et de la technologie, l'intelligence artificielle est devenue une force importante dans la promotion du progrès social. À notre époque, nous avons la chance d’être témoins et de participer à l’innovation et à l’application de l’intelligence artificielle distribuée (DAI). L’intelligence artificielle distribuée est une branche importante du domaine de l’intelligence artificielle, qui a attiré de plus en plus d’attention ces dernières années. Les agents basés sur de grands modèles de langage (LLM) ont soudainement émergé. En combinant les puissantes capacités de compréhension du langage et de génération des grands modèles, ils ont montré un grand potentiel en matière d'interaction en langage naturel, de raisonnement par connaissances, de planification de tâches, etc. AIAgent reprend le grand modèle de langage et est devenu un sujet brûlant dans le cercle actuel de l'IA. Au
