
 développement back-end
Tutoriel Python
Création d'un enregistreur de données personnalisé avec Raspberry Pi pour les véhicules : intégration des capteurs BNO et ELM
développement back-end
Tutoriel Python
Création d'un enregistreur de données personnalisé avec Raspberry Pi pour les véhicules : intégration des capteurs BNO et ELM
Création d'un enregistreur de données personnalisé avec Raspberry Pi pour les véhicules : intégration des capteurs BNO et ELM

Résumé
En tant qu'ingénieur logiciel travaillant dans l'industrie automobile, je m'intéresse vivement aux véhicules autonomes, aux techniques de mesure des données et aux méthodes d'analyse. Dans cet article, je décrirai un système de mesure sur mesure, détaillant le processus à partir de zéro, et présenterai quelques résultats expérimentaux. Mon enregistreur de données se compose d'un Raspberry Pi 3, d'un capteur BNO055 et d'un adaptateur ELM327 OBD-II, qui sont respectivement responsables du calcul, de la collecte des données d'accélération et de vitesse de rotation et de la récupération des informations sur le moteur d'un véhicule réel.
Table des matières
1.Contexte
2.Architecture
3.Informations sur le capteur
4.Informations sur le système de coordonnées
5. Comparaison des données
6.Logiques de base
7.Conclusion
8.Référence
1. Contexte
Ces dernières années, l'essor de l'IoT, de l'intelligence artificielle et de l'informatique de pointe a apporté des progrès significatifs à diverses industries, dont le secteur automobile. Les véhicules modernes sont équipés d'une multitude de capteurs qui fonctionnent ensemble pour créer des systèmes sophistiqués, permettant tout, des fonctionnalités de sécurité améliorées aux capacités de conduite autonome.
En règle générale, la surveillance de l’état d’un véhicule nécessite l’utilisation de capteurs avancés et coûteux pour obtenir des mesures précises et fiables. Cependant, pour certaines situations, comme l'obtention de données sur des circuits pour une compréhension générale de la dynamique du véhicule, ces capteurs haut de gamme peuvent ne pas être strictement nécessaires. Conscient de cela, j'ai décidé de créer un système rentable capable de mesurer l'état physique d'un véhicule à l'aide de composants plus abordables.
J'ai décidé de me concentrer sur la mesure des données liées à la dynamique du véhicule plutôt que sur le confort de conduite. En effet, l'analyse du confort de conduite nécessite de capturer davantage de signaux haute fréquence avec une précision appropriée, ce qui nécessite de définir une fréquence d'échantillonnage élevée pendant la mesure.
Plus précisément, dans les caractéristiques de réponse en fréquence de l'accélération latérale par rapport à l'angle de braquage, la fréquence de résonance apparaît généralement inférieure à 5 Hz, bien qu'elle dépende de la vitesse du véhicule. En revanche, dans l'analyse du confort de conduite, les discussions s'étendent souvent à plusieurs dizaines de Hz.
Par conséquent, l'objectif principal du développement du système de mesure est de créer un système d'enregistrement de données à faible coût qui facilite l'analyse des données dans le domaine de la dynamique des véhicules.
2. Architecture
Le système de mesure se compose du matériel suivant :
- Framboise Pi 3
- BNO055
- Scanner ELM327 OBD2
- Onduleur
- Moniteur
- clavier/souris (si besoin)
Le Raspberry Pi fait office d'ordinateur principal, collectant les données du BNO055 et de l'ELM327. Le Raspberry Pi communique avec le BNO055 via I2C et avec l'ELM327 via Bluetooth (voir Figure 1).

3. Informations sur le capteur
3-1. Adafruits BNO055
Le capteur BNO055 est capable de mesurer différents types de mouvements et de données :★Adafruit BNO055 Aperçu[1]
Orientation absolue (vecteur d'Euler, 100 Hz) : fournit des données d'orientation sur trois axes basées sur une sphère à 360°.
Orientation absolue (Quaternion, 100 Hz) : offre une sortie quaternion à quatre points pour une manipulation plus précise des données.
Vecteur de vitesse angulaire (100 Hz) : mesure la vitesse de rotation en radians par seconde (rad/s) sur trois axes.
Vecteur d'accélération (100 Hz) : capture l'accélération, y compris la gravité et le mouvement linéaire, en mètres par seconde carrée (m/s²) sur trois axes.
Vecteur d'intensité de champ magnétique (20 Hz) : détecte l'intensité du champ magnétique en microteslas (µT) sur trois axes.
Vecteur d'accélération linéaire (100 Hz) : enregistre les données d'accélération linéaire (hors gravité) en mètres par seconde carrée (m/s²) sur trois axes.
Vecteur de gravité (100 Hz) : mesure l'accélération gravitationnelle (à l'exclusion de tout mouvement) en mètres par seconde carrée (m/s²) sur trois axes.
Température (1 Hz) : fournit la température ambiante en degrés Celsius.
Le BNO055 est compact et pris en charge par la bibliothèque Python d'Adafruit appelée Adafruit_CircuitPython. De plus, une bibliothèque en langage C est disponible auprès d'Adafruit.
★Adafruit_CircuitPython_BNO055[2]
★Adafruit_BNO055[3]
Pour une démonstration, vous pouvez visionner la vidéo ici :
Démo Adafruit BNO055
★Démo Adafruit BNO055[4]
3-2. ELM327
The ELM327 is a widely used OBD-II (On-Board Diagnostics) adapter that allows access to vehicle engine data through a standard interface. It acts as a bridge between the vehicle's ECU (Electronic Control Unit) and external devices such as computers or smartphones, enabling the retrieval of diagnostic and performance data. Key features and capabilities of the ELM327 include:★ELM327 information[5]
OBD-II Protocol Support: The ELM327 supports various OBD-II protocols, including ISO 9141, ISO 14230 (KWP2000), ISO 15765 (CAN), and more, making it compatible with a broad range of vehicles.
Diagnostic Trouble Codes (DTCs): It can read and clear diagnostic trouble codes from the vehicle's ECU, assisting in identifying and troubleshooting issues.
Live Data Streaming: Provides real-time data from the vehicle's sensors, such as engine RPM, vehicle speed, coolant temperature, and fuel level.
Freeze Frame Data: Captures and stores data at the moment a fault is detected, which helps in diagnosing intermittent problems.
Vehicle Information: Retrieves details about the vehicle, including the VIN (Vehicle Identification Number), calibration IDs, and more.
Compatibility: Available in various forms, including Bluetooth, USB, and Wi-Fi versions, allowing compatibility with different devices and platforms.
Typically, the ELM327 is used to diagnose vehicle status, particularly engine states. However, it can also be employed to collect a wide range of data from the vehicle. The ELM327 is available for purchase on platforms like Amazon, with prices ranging from approximately $20 to $80.
Using the python-OBD library, you can create queries to gather data via the ELM327 adapter, allowing for customizable and detailed data collection
4. Coordinate system information
Since this system interacts with multiple sensors and an actual vehicle, it must understand each coordinate system.
4-1. BNO055 coordinate system for data logger
The image below shows the BNO055 coordinate system for my data measurement system. My system additionally calculates rotational angles using quaternions. The sensor coordinate system needs to match the vehicle coordinate system.

4-2. Vehicle coordinate system(ISO 8855)
The measurement system operates based on the vehicle coordinate system.

4-3. iPhone Coordinate System
I used an iPhone application that can measure multiple physical data points, including acceleration, gyro, and more, for validation tasks. The purpose of using the iPhone application is to confirm the validity of my data measurement system with data from this application. Figure 4 is cited from Apple's developer site.

5. Data Comparison
In this section, I present some experimental results. As the first step, I conducted sine wave tasks to confirm whether my measurement system outputs readings without errors, such as unit mistakes. This part is basic but crucial to ensure the correct way to gather data.
Next, I measured some physical values on an actual vehicle while driving.
Then, I checked ELM327's performance and sampling accuracy of each sensor.
5-1. Sine wave tests
I conducted sine wave tests, and in this section, I present the results. The objective of these tests is to confirm the following:
- Whether the coordinate system of the measurement system is functioning properly
- To validate the accuracy of the measurement app on the iPhone
To achieve this, I used "phyphox" ★phyphox[8], a smartphone app that can measure various physical values. I mounted my BNO055 sensor on the iPhone as shown below [Figure 5].

Figure 6 shows the sine wave test results with a sampling frequency of 10 Hz. The legend "VDDM" represents data collected by a measurement system I developed, while "iPhone" indicates data collected using "phyphox".

The data from both VDDM and the iPhone show similar trends across all axes, indicating that both applications are capturing similar motion patterns.
The VDDM data appears to be slightly more variable, particularly in the acceleration graphs, which might suggest higher sensitivity or a different filtering approach compared to the iPhone.
Both data generally agree well, but the differences in amplitude suggest that further calibration or adjustment may be needed depending on the accuracy requirements.
The VDDM might be capturing additional noise or higher frequency components, especially in the acceleration graphs, which are not present in the iPhone data. This could either be beneficial for detailed analysis or require further filtering.
5-2. Vehicle Dynamics Data Evaluation
Figure 7 shows the results of an experiment focusing on data from the BNO055 in an actual vehicle. An iPhone application called "phyphox" was used as a reference. The sampling frequency was 50Hz. I observed that the acceleration and rotational signals measured by the data logging system I developed on the vehicle contained noise, outliers, and NaN values. Therefore, I applied post-processing functions, including an IQR method and a Butterworth low-pass filter. The term "fc" in the legend of each graph represents the cutoff frequency. For example, fc_19.5 indicates a cutoff frequency of 19.5Hz. Note that this experiment was conducted using only the BNO055 sensor, and the ELM327 function was disabled.

The data from VDDM (raw data) and the iPhone show similar trends across all axes. This suggests that both systems are capturing the same motion patterns.
The data from VDDM appears to have greater variation compared to the iPhone data. This is particularly noticeable in the acceleration graphs and may indicate that VDDM captures data with higher sensitivity or uses a different filtering approach.
Filtered data from VDDM (with fc 19.5Hz and 10Hz) shows reduced variation compared to the raw data and is closer to the iPhone data. This suggests that VDDM (raw data) might include more noise or high-frequency components.
Raw data from VDDM contained outliers and missing values, which were mitigated by applying filters. This is particularly evident in the roll rate and pitch rate graphs.
VDDM appears to include more high-frequency components and noise compared to the iPhone. While this can be advantageous for detailed analysis, additional filtering or hardware-level adjustments might be needed if noise reduction is critical.
5-3. Vehicle Speed Evaluation
Figure 8 shows data regarding engine performance. These data were collected using the ELM327 scanner with a sampling frequency of 4 Hz. The BNO055 function was disabled during data collection.

- Vehicle speed data from VDDM (raw data) and the iPhone exhibit similar trends.
- The ELM327 can collect information on engine RPM and throttle position. These data are useful for understanding general throttle pedal operation. Note that the test vehicle is HEV.
5-4. Evaluation of the accuracy of the sampling frequency
During my experiments with the BNO055 and ELM327, I observed delays in sampling. To identify the issues, I implemented measurements by adjusting the sampling frequency and by activating and deactivating the ELM327 and BNO055.
Initially, I present the time difference corresponding to the sampling frequency. This test involves the use of both the BNO055 and the ELM327 sensors

Figure 9 shows that when the sampling frequency is set to 10Hz, the precision of the sampling time significantly decreases.
The ELM327 cannot achieve sampling frequencies as high as the BNO055, which may negatively impact the overall system performance. Nevertheless, to better understand the performance of each sensor, I conducted individual measurements.
Figures 10 and 11 illustrate the relationship between sampling frequencies and the sampling timing precision. The sampling timing precision is represented as:
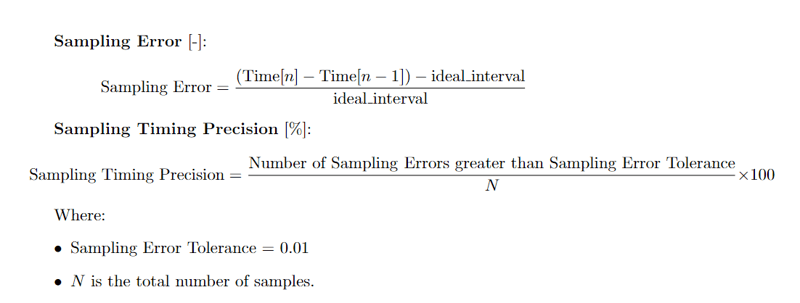

According to Figure 10, the BNO055 can respond to sampling frequencies up to 50 Hz. However, beyond 60 Hz, the sampling timing precision drops dramatically.

Figure 11 shows that the ELM327 has lower responsivity compared to the BNO055. The ELM327 maintains good sampling timing precision only up to 5 Hz. This is because the ELM327 communicates with a vehicle via OBD, and the vehicle's ECU may not support high-frequency responses to OBD requests, resulting in low-frequency communication.
Additionally, the ELM327 is the cheapest and lowest-quality option among sensors that can retrieve data from multiple ECUs in a vehicle via OBD-II.
This post★Challenging your car's trip computer fuel efficiency figures[9] says that
One important thing to consider with the Elm327 is that response times are far from being negligible: the device may take .1 to .3 seconds to answer to a message request, which means that adding too many signals rapidly ends up reducing the sampling rate to a point where it gets useles
For more detailed advice, visit this page:★Choosing OBDII adapter[10]
As for the causes of the low performance, the following reasons could be considered:
- Vehicle ECU's specifications
- Too many requests to the OBD scanner
- Requests for multiple signals from multiple ECUs
- Issues with software
- Network problems
- OBD-II protocol overhead
- Scanner hardware limitations
- Vehicle communication speed
- Firmware and driver issues
- Environmental factors
6. Core Logics
Measurement software that I have been developing assumes that use cases that multiple sensors need. Additionally, a user can change measurement settings on the yaml file. A user can operate the measurement application on a simple GUI. You can see source code here: ★VDDM[11]
The structure of the measurement system is below:
VDDM/ │ ├── fusion/ │ ├── __init__.py │ ├── sensor_fusion.py # Handles data fusion, collects data from sensors │ └── sensors/ │ ├── __init__.py │ ├── bno055_measurement.py # Script for BNO055 sensor data collection │ └── elm327_measurement.py # Script for ELM327 OBD2 data collection │ ├── signalprocessing/ │ ├── __init__.py │ └── filter.py # Contains filtering algorithms (e.g., Butterworth filter) │ ├── config/ │ ├── config_manager.py # Loads configuration from YAML │ └── measurement_system_config.yaml # Configuration file for sensors and system settings │ ├── utils/ │ ├── tools.py # Utility functions (e.g., wait functions) │ └── visualize_data.py # Functions to format and display sensor data │ ├── measurement/ │ ├── __init__.py │ └── measurement_control.py # Controls the measurement process │ ├── gui/ │ ├── __init__.py │ └── main_gui.py # GUI setup for starting/stopping measurement │ ├── main.py # Entry point for starting the system └── requirements.txt # Project dependencies
Below diaglam indicates the flow of VDDM.
main.py
└── main_gui.py
├── Starts GUI interface and buttons
└── measurement_control.py
├── Initializes sensor measurements
├── Controls start/stop of measurements
└── sensor_fusion.py
├── Manages sensor data collection and fusion
├── Uses:
│ ├── bno055_measurement.py (BNO055 sensor data collection)
│ └── elm327_measurement.py (ELM327 OBD2 data collection)
└── Processes data with:
├── filter.py (Applies Butterworth low-pass filter)
└── visualize_data.py (Formats and visualizes sensor data)
VDDM's main components are VDDM/fusion/sensor_fusion.py, VDDM/fusion/sensors/bno055_measurement.py, and VDDM/fusion/sensors/elm327_measurement.py.
# sensor_fusion.py
import os
import sys
import importlib
from time import perf_counter
from collections import defaultdict
import pandas as pd
import datetime
import asyncio
import numpy as np
parent_dir = os.path.abspath(os.path.join(os.path.dirname(__file__), '..'))
sys.path.append(parent_dir)
from config import config_manager
from utils.tools import wait_process
from utils.visualize_data import format_sensor_fusion_data
from signalprocessing.filter import butterlowpass
config_path = os.path.join(parent_dir, 'config', 'measurement_system_config.yaml')
class SensorFactory:
@staticmethod
def create_sensor(sensor_type, config):
try:
# Import the appropriate sensor module based on sensor_type
module = importlib.import_module(f"fusion.sensors.{sensor_type}_measurement")
# Get a sensor class
sensor_class = getattr(module, f"{sensor_type.upper()}")
# Create a sensor instance and return
return sensor_class(config)
except (ImportError, AttributeError) as e:
print(f"Error creating sensor {sensor_type}: {e}")
return None
class Sensors:
def __init__(self, config):
self.config = config_manager.load_config(config_path)
self.sensor_list = tuple(self.config.sensors.keys())
self.sensor_instances = {}
self.is_running = False
self.SAMPLING_FREQUENCY_HZ = config.sampling_frequency_hz
self.SAMPLING_TIME = 1 / self.SAMPLING_FREQUENCY_HZ
self.SAVE_DATA_DIR = config.save_data_dir
self.SAVE_BUF_CSVDATA_PATH = self.SAVE_DATA_DIR + "/" + "measurement_raw_data.csv"
self.SEQUENCE_LENGTH = config.sequence_length # Windows size [s]
# Buffer size is determined by the relation of sequence length and sampling frequency
# Buffer secures data for SEQUENCE_LENGTH[s]
self.MAX_DATA_BUF_LEN = self.SEQUENCE_LENGTH * self.SAMPLING_FREQUENCY_HZ
self.FPASS = config.filter_params.fpass
self.FSTOP = config.filter_params.fstop
self.GPASS = config.filter_params.gpass
self.GSTOP = config.filter_params.gstop
self.is_filter = config.filter_params.is_filter
self.is_show_real_time_data = config.is_show_real_time_data
self.TIMEZONE = config.timezone
self.all_data_columns_list = ()
for sensor_name in self.sensor_list:
self.all_data_columns_list += tuple(self.config["sensors"][sensor_name]["data_columns"])
self.data_buffer = pd.DataFrame() # data buffer
for sensor_type in self.sensor_list:
sensor_config = self.config.sensors[sensor_type]
sensor_instance = SensorFactory.create_sensor(sensor_type, sensor_config)
if sensor_instance:
self.sensor_instances[sensor_type] = sensor_instance
if os.path.exists(self.SAVE_BUF_CSVDATA_PATH):
os.remove(self.SAVE_BUF_CSVDATA_PATH)
print(f"File '{self.SAVE_BUF_CSVDATA_PATH}' was deleted for initialization")
def get_sensor(self, sensor_type):
"""
Retrieve the sensor instance corresponding to the specified sensor type.
Args:
sensor_type (str): The type of the sensor to retrieve.
Returns:
object: The sensor instance corresponding to the specified sensor type.
Returns None if the sensor type does not exist.
"""
return self.sensor_instances.get(sensor_type)
def collect_data(self):
"""
Collect data from all sensors.
This method iterates over all sensor instances and collects data from each sensor.
The collected data is stored in a dictionary where the keys are sensor types and
the values are the data collected from the corresponding sensors.
Returns:
dict: A dictionary containing the collected data from all sensors.
The keys are sensor types and the values are the data from each sensor.
Raises:
Exception: If an error occurs while collecting data from any sensor, the exception
is caught and printed.
"""
data = {}
try:
for sensor_type, sensor in self.sensor_instances.items():
# get data from sensors
data[sensor_type] = sensor.get_data_from_sensor()
return data
except Exception as e:
print(e)
def on_change_start_measurement(self):
"""
Start the measurement process.
This method sets the is_running flag to True, indicating that the measurement
process should start.
"""
self.is_running = True
def on_change_stop_measurement(self):
"""
Stop the measurement process.
This method sets the is_running flag to False, indicating that the measurement
process should stop.
"""
self.is_running = False
def filtering(self, df, labellist):
"""
Apply a low-pass filter to the specified columns in the DataFrame.
This method applies a Butterworth low-pass filter to each column specified
in the labellist. The "Time" column should be excluded from the labellist
as it is not needed for the computation.
Args:
df (pd.DataFrame): The input DataFrame containing the data to be filtered.
labellist (list of str): A list of column names to be filtered. The "Time"
column should not be included in this list.
Returns:
pd.DataFrame: A new DataFrame with the filtered data.
"""
filtered_df = df.copy()
for labelname in labellist:
# Ensure the column is converted to a numpy array
x = df[labelname].to_numpy()
filtered_df[labelname] = butterlowpass(
x=x, # Correctly pass the numpy array as 'x'
fpass=self.FPASS,
fstop=self.FSTOP,
gpass=self.GPASS,
gstop=self.GSTOP,
fs=self.SAMPLING_FREQUENCY_HZ,
dt=self.SAMPLING_TIME,
checkflag=False,
labelname=labelname
)
return filtered_df
def convert_dictdata(self, current_time, sensor_data_dict):
"""
Convert nested dictionary data from multiple sensors into a single DataFrame.
This method converts nested dictionary data obtained from multiple sensors
into a single dictionary and then converts it into a pandas DataFrame. The
current_time information is associated with the data.
Args:
current_time (float): The current time at which the data was obtained.
sensor_data_dict (dict): A nested dictionary containing data from multiple sensors.
Returns:
pd.DataFrame: A DataFrame containing the converted data with the current time information.
"""
converted_data = {'Time': current_time}
for sensor, data in sensor_data_dict.items():
converted_data.update(data)
converted_data = pd.DataFrame([converted_data])
return converted_data
async def update_data_buffer(self, dict_data):
"""
Add data from sensors to the buffer and save it if necessary.
This method adds the provided sensor data to the internal buffer. If the buffer
exceeds the specified maximum length, the oldest data is saved to a CSV file
and removed from the buffer.
Args:
dict_data (dict): The data from sensors to be added to the buffer.
"""
# Add data to the buffer
self.data_buffer = pd.concat([self.data_buffer, dict_data], ignore_index=True)
# If the buffer exceeds the specified length, save the oldest data
if len(self.data_buffer) > self.MAX_DATA_BUF_LEN:
# Save the oldest data to a CSV file
old_data = self.data_buffer.head(self.MAX_DATA_BUF_LEN)
await self.save_data(old_data, self.SAVE_BUF_CSVDATA_PATH)
# Update the buffer
self.data_buffer = self.data_buffer.tail(len(self.data_buffer) - self.MAX_DATA_BUF_LEN)
async def save_data_async(self, df, path):
"""
Save the DataFrame to a CSV file asynchronously.
This method uses asyncio.to_thread to run the synchronous to_csv method
in a separate thread, allowing it to be handled asynchronously.
Args:
df (pd.DataFrame): The DataFrame to be saved.
path (str): The file path where the DataFrame should be saved.
"""
if not os.path.isfile(path):
await asyncio.to_thread(df.to_csv, path, sep=',', encoding='utf-8', index=False, header=True, mode='w')
else:
await asyncio.to_thread(df.to_csv, path, sep=',', encoding='utf-8', index=False, header=False, mode='a')
async def save_data(self, df, path):
"""
Save the DataFrame to a CSV file asynchronously.
This method calls save_data_async to save the DataFrame to a CSV file
asynchronously.
Args:
df (pd.DataFrame): The DataFrame to be saved.
path (str): The file path where the DataFrame should be saved.
"""
await self.save_data_async(df, path)
async def finish_measurement_and_save_data(self):
"""
Finish the measurement process and save the data.
This method finalizes the measurement process by saving the buffered data
to a CSV file. It also applies filtering if specified and saves the filtered
data to a separate CSV file. The method handles time zone settings and
generates a timestamp for the file names.
The buffered data is saved to a temporary CSV file, which is then read back
and saved to a final file path with a timestamp. If filtering is enabled,
the filtered data is also saved. The temporary CSV file is deleted after
the data is saved.
Raises:
Exception: If an error occurs during the file operations.
"""
t_delta = datetime.timedelta(hours=9)
TIMEZONE = datetime.timezone(t_delta, self.TIMEZONE)# You have to set your timezone
now = datetime.datetime.now(TIMEZONE)
timestamp = now.strftime('%Y%m%d%H%M%S')
final_file_path = self.SAVE_BUF_CSVDATA_PATH.replace(self.SAVE_BUF_CSVDATA_PATH.split('/')[-1],
timestamp + "/" + timestamp + '_' +
self.SAVE_BUF_CSVDATA_PATH.split('/')[-1])
await self.save_data_async(self.data_buffer, self.SAVE_BUF_CSVDATA_PATH)
raw_df = pd.read_csv(self.SAVE_BUF_CSVDATA_PATH, header=0)
os.makedirs(self.SAVE_DATA_DIR + "/" + timestamp, exist_ok=True)
raw_df.to_csv(final_file_path, sep=',', encoding='utf-8', index=False, header=True)
if self.is_filter:
filt_df = self.filtering(df=raw_df, labellist=raw_df.columns[1:])
filt_df.to_csv(final_file_path.replace('_raw_data.csv', '_filt_data.csv'), sep=',', encoding='utf-8', index=False, header=True)
if os.path.exists(self.SAVE_BUF_CSVDATA_PATH):
os.remove(self.SAVE_BUF_CSVDATA_PATH)
print(f"File '{self.SAVE_BUF_CSVDATA_PATH}' was deleted")
else:
print(f"File '{self.SAVE_BUF_CSVDATA_PATH}' is not existed")
async def sensor_fusion_main():
"""
Main function for sensor fusion.
This function initializes the sensor fusion process, starts the measurement loop,
collects data from multiple sensors, updates the data buffer, and handles real-time
data display. It also calculates and prints the sampling delay and reliability rate
upon termination.
The main loop runs until the measurement process is stopped, either by an exception
or a keyboard interrupt.
Raises:
Exception: If an error occurs during the measurement process, it is caught and printed.
KeyboardInterrupt: If a keyboard interrupt occurs, the measurement process is stopped
and the data is saved.
"""
print("Start sensor fusion main")
config = config_manager.load_config(config_path)
sensors = Sensors(config["master"])
print("Called an instance of Sensors class")
# sensors.start_all_measurements()
sampling_counter = 0
current_time = 0
#sensors.is_running = True
sensors.on_change_start_measurement()
try:
main_loop_start_time = None
while sensors.is_running:
iteration_start_time = perf_counter() # Start time of each iteration
if main_loop_start_time is None:
main_loop_start_time = iteration_start_time # initialize main loop start time
current_time = perf_counter() - main_loop_start_time # Current time
data = sensors.collect_data() # Get data from sensors
sampling_counter += 1 # Num of sampling
converted_data = sensors.convert_dictdata(current_time, data) # Convert data to dataframe format
# Update the data buffer. If it reaches the buffer limit, write the data to a CSV file.
await sensors.update_data_buffer(converted_data)
# Display data in real time. This process is executed on additional thread.
if sensors.is_show_real_time_data:
formatted_data = format_sensor_fusion_data(data, sensors.all_data_columns_list)
print("--------------------------------------------------------------------")
print("Current Time is: {:.3f}".format(current_time))
print(formatted_data)
# Wait based on the sampling interval and execution time to maintain the sampling frequency.
iteration_end_time = perf_counter()
iteration_duration = iteration_end_time - iteration_start_time
print("Iteration duration is: {0} [s]".format(iteration_duration))
sleep_time = max(0, sensors.SAMPLING_TIME - iteration_duration)
if sleep_time > 0:
wait_process(sleep_time)
except Exception as e:
print(e)
except KeyboardInterrupt:
sensors.on_change_stop_measurement()
print("KeyboardInterrupt")
await sensors.finish_measurement_and_save_data()
finally:
print("finish")
# Compute delay of sampling
main_loop_end_time = perf_counter() - main_loop_start_time
print("Program terminated")
print("main loop is ended. current time is: {:.3f}".format(current_time))
print("main loop is ended. end time is: {:.3f}".format(main_loop_end_time))
print("sampling num is: {}".format(sampling_counter))
# Compute ideal sampliing time
ideal_time = ((sampling_counter - 1) / sensors.SAMPLING_FREQUENCY_HZ)
# Cpmpute a delay
delay_time = current_time - ideal_time
# reliability rate
sampling_reliability_rate = (delay_time / (sampling_counter / sensors.SAMPLING_FREQUENCY_HZ)) * 100
print("sampling delay is: {:.3f} s".format(delay_time))
print("sampling delay rate is: {:.3f} %".format(sampling_reliability_rate))
if __name__ == '__main__':
asyncio.run(sensor_fusion_main())
sensor_fusion.py manages sensor data collection and processing using asynchronous operations. It dynamically creates sensor instances, collects data, applies filters, and saves the data to CSV files. The script also displays real-time data if needed and monitors performance metrics like sampling delay and reliability. The main function runs a loop that handles data collection, buffer updates, and performance reporting. It uses asynchronous operations to efficiently manage data saving and ensure smooth performance.
# bno055_measurement.py
import time
import numpy as np
import adafruit_bno055
import board
import os
import sys
parent_dir = os.path.abspath(os.path.join(os.path.dirname(__file__), '..', '..'))
sys.path.append(parent_dir)
from config.config_manager import load_config
config_path = os.path.join(parent_dir, 'config', 'measurement_system_config.yaml')
class BNO055:
def __init__(self, config):
self.COLUMNS = config.data_columns
self.SAMPLING_FREQUENCY_HZ = config.sampling_frequency_hz
self.SAMPLING_TIME = 1 / self.SAMPLING_FREQUENCY_HZ
self.SAVE_DATA_DIR = config.save_data_dir
self.SEQUENCE_LENGTH = config.sequence_length
self.FPASS = config.filter_params.fpass
self.FSTOP = config.filter_params.fstop
self.GPASS = config.filter_params.gpass
self.GSTOP = config.filter_params.gstop
self.Isfilter = config.filter_params.is_filter
self.IsStart = False
self.IsStop = True
self.Is_show_real_time_data = config.is_show_real_time_data
i2c_instance = board.I2C() # Create i2c instance
self.bno055_sensor = adafruit_bno055.BNO055_I2C(i2c_instance) # create BNO055_I2C instance
def calibration(self):
print("Start calibration!")
while not self.bno055_sensor.calibrated:
print('SYS: {0}, Gyro: {1}, Accel: {2}, Mag: {3}'.format(*(self.bno055_sensor.calibration_status)))
time.sleep(1)
def calcEulerfromQuaternion(self, _w, _x, _y, _z):
"""
Calculate Euler angles (roll, pitch, yaw) from quaternion components.
This method converts quaternion components (_w, _x, _y, _z) into Euler angles
(roll, pitch, yaw) in degrees. If any of the quaternion components are None,
it returns (0.0, 0.0, 0.0) and prints an error message.
Args:
_w (float): The w component of the quaternion.
_x (float): The x component of the quaternion.
_y (float): The y component of the quaternion.
_z (float): The z component of the quaternion.
Returns:
tuple: A tuple containing the roll, pitch, and yaw angles in degrees.
If an error occurs, it returns (0.0, 0.0, 0.0) and prints an error message.
"""
if None in (_w, _x, _y, _z):
print(f"Error: One or more quaternion values are None: {_w}, {_x}, {_y}, {_z}")
return 0.0, 0.0, 0.0
try:
sqw = _w ** 2
sqx = _x ** 2
sqy = _y ** 2
sqz = _z ** 2
COEF_EULER2DEG = 57.2957795131
# Yaw
term1 = 2.0 * (_x * _y + _z * _w)
term2 = sqx - sqy - sqz + sqw
yaw = np.arctan2(term1, term2)
# Pitch
term1 = -2.0 * (_x * _z - _y * _w)
term2 = sqx + sqy + sqz + sqw
pitch = np.arcsin(term1 / term2) if -1 <= term1 / term2 <= 1 else 0.0
# Roll
term1 = 2.0 * (_y * _z + _x * _w)
term2 = -sqx - sqy + sqz + sqw
roll = np.arctan2(term1, term2)
return COEF_EULER2DEG * roll, COEF_EULER2DEG * pitch, COEF_EULER2DEG * yaw
except Exception as e:
print(f"Error in calcEulerfromQuaternion: {e}")
return 0.0, 0.0, 0.0
def get_data_from_sensor(self):
"""
Retrieve data from the BNO055 sensor and return it as a dictionary.
This method collects various sensor readings from the BNO055 sensor, including
Euler angles, gyroscope data, linear acceleration, quaternion, magnetic field,
and calibration status. It then constructs a dictionary with these values and
returns only the columns specified in self.COLUMNS.
Returns:
dict: A dictionary containing the sensor data. Only the columns specified
in self.COLUMNS are included in the returned dictionary.
"""
# Get data
euler_z, euler_y, euler_x = [val for val in self.bno055_sensor.euler] # X: yaw, Y: pitch, Z: roll
gyro_x, gyro_y, gyro_z = [val for val in self.bno055_sensor.gyro] # Gyro[rad/s]
linear_accel_x, linear_accel_y, linear_accel_z = [val for val in self.bno055_sensor.linear_acceleration] # Linear acceleration[m/s^2]
quaternion_1, quaternion_2, quaternion_3, quaternion_4 = [val for val in self.bno055_sensor.quaternion] # Quaternion
quat_roll, quat_pitch, quat_yaw = self.calcEulerfromQuaternion(quaternion_1, quaternion_2, quaternion_3, quaternion_4) # Cal Euler angle from quaternion
magnetic_x, magnetic_y, magnetic_z = [val for val in self.bno055_sensor.magnetic] # Magnetic field
calibstat_sys, calibstat_gyro, calibstat_accel, calibstat_mag = [val for val in self.bno055_sensor.calibration_status] # Status of calibration
data_dict = {
"linear_accel_x": linear_accel_x,
"linear_accel_y": linear_accel_y,
"linear_accel_z": linear_accel_z,
"gyro_x": gyro_x,
"gyro_y": gyro_y,
"gyro_z": gyro_z,
"euler_x": euler_x,
"euler_y": euler_y,
"euler_z": euler_z,
"quat_roll": quat_roll,
"quat_pitch": quat_pitch,
"quat_yaw": quat_yaw,
"quaternion_1": quaternion_1,
"quaternion_2": quaternion_2,
"quaternion_3": quaternion_3,
"quaternion_4": quaternion_4,
"magnetic_x": magnetic_x,
"magnetic_y": magnetic_y,
"magnetic_z": magnetic_z,
"calibstat_sys": calibstat_sys,
"calibstat_gyro": calibstat_gyro,
"calibstat_accel": calibstat_accel,
"calibstat_mag": calibstat_mag
}
return {column: data_dict[column] for column in self.COLUMNS if column in data_dict}
def format_sensor_data(data, labels):
"""
Format sensor data into a string for display.
This method takes a dictionary of sensor data and a list of labels, and formats
the data into a string where each label is followed by its corresponding value.
If a value is None, it is replaced with the string "None". Each label-value pair
is separated by " / ".
Args:
data (dict): The sensor data to format.
labels (list of str): The list of labels to include in the formatted string.
Returns:
str: A formatted string containing the sensor data.
"""
formatted_str = ""
if isinstance(data, dict):
for label in labels:
value = data.get(label, None)
if value is None:
value = "None"
else:
value = f"{value:.4f}"
formatted_str += f"{label}: {value} / "
return formatted_str.rstrip(" / ")
def test_main():
"""
Main function for testing sensor data collection and display.
This function initializes the BNO055 sensor, starts a loop to collect data,
formats the data for display, and prints it in real-time. It also calculates
and prints the sampling delay and reliability rate upon termination.
The main loop runs until interrupted by the user.
Raises:
KeyboardInterrupt: If a keyboard interrupt occurs, the loop is terminated
and the final statistics are printed.
"""
from utils.tools import wait_process
from time import perf_counter
import matplotlib.pyplot as plt
print("Main start")
config = load_config(config_path)
meas_bno055 = BNO055(config.sensors['bno055'])
start_time = perf_counter()
sampling_counter = 0
try:
main_loop_start_time = perf_counter()
while True:
iteration_start_time = perf_counter()
# Data acquisition process
data = meas_bno055.get_data_from_sensor()
current_time = perf_counter() - start_time
sampling_counter += 1
if meas_bno055.Is_show_real_time_data:
formatted_data = format_sensor_data(data, meas_bno055.COLUMNS)
# current time
print("--------------------------------------------------------------------")
print("Current Time is: {:.3f}".format(current_time))
print(formatted_data)
# Wait to meet the sampling frequency based on the sampling interval and execution time
elapsed_time = perf_counter() - iteration_start_time
sleep_time = meas_bno055.SAMPLING_TIME - elapsed_time
if sleep_time > 0:
wait_process(sleep_time)
except KeyboardInterrupt:
print("Interrupted by user")
finally:
# Calculate the sampling delay from the number of samples and the current time
main_loop_end_time = perf_counter() - main_loop_start_time
print("Program terminated")
print("main loop is ended. current time is: {:.3f}".format(current_time))
print("main loop is ended. end time is: {:.3f}".format(main_loop_end_time))
print("sampling num is: {}".format(sampling_counter)) # Since it is 0-based, the number of samples is current_time + 1
# Calculate the ideal sampling time
ideal_time = ((sampling_counter - 1) / meas_bno055.SAMPLING_FREQUENCY_HZ)
# Calculate the delay
delay_time = current_time - ideal_time
# The reliability rate is the delay divided by the sampling time
sampling_reliability_rate = (delay_time / (sampling_counter / meas_bno055.SAMPLING_FREQUENCY_HZ)) * 100
print("sampling delay is: {:.3f} s".format(delay_time))
print("sampling delay rate is: {:.3f} %".format(sampling_reliability_rate))
if __name__ == '__main__':
test_main()
This script interfaces with the BNO055 sensor to collect and process data. It retrieves sensor readings, such as Euler angles and gyroscope data, formats them for display, and prints real-time updates if configured. The script includes a calibration method and calculates Euler angles from quaternion data. It manages data acquisition with a defined sampling frequency and calculates sampling delay and reliability. The main loop continues until interrupted, reporting performance metrics upon termination.
# elm327_measurement.py
import obd
import os
import time
from collections import deque
import numpy as np
import pandas as pd
import datetime
import asyncio
import scipy
from scipy import signal
import matplotlib as plt
import sys
from collections import defaultdict
import random
parent_dir = os.path.abspath(os.path.join(os.path.dirname(__file__), '..', '..'))
sys.path.append(parent_dir)
from config.config_manager import load_config
config_path = os.path.join(parent_dir, 'config', 'measurement_system_config.yaml')
class ELM327:
def __init__(self, config):
"""
Initialize the ELM327 class with configuration parameters.
Args:
config (dict): Configuration parameters for the ELM327.
"""
self.COLUMNS = config.data_columns
self.SAMPLING_FREQUENCY_HZ = config.sampling_frequency_hz
self.SAMPLING_TIME = 1 / self.SAMPLING_FREQUENCY_HZ
self.SAVE_DATA_DIR = config.save_data_dir
self.SEQUENCE_LENGTH = config.sequence_length
self.FPASS = config.filter_params.fpass
self.FSTOP = config.filter_params.fstop
self.GPASS = config.filter_params.gpass
self.GSTOP = config.filter_params.gstop
self.Isfilter = config.filter_params.is_filter
self.res = self.connect_to_elm327()
self.is_offline = config.is_offline
self.IsStart = False
self.IsStop = True
self.Is_show_real_time_data = config.is_show_real_time_data
def initialize_BLE(self):
"""
Initialize Bluetooth Low Energy (BLE) for ELM327 connection.
"""
os.system('sudo hcitool scan')
os.system('sudo hciconfig hci0 up')
os.system('sudo rfcomm bind 0 8A:2A:D4:FF:38:F3')
os.system('sudo rfcomm listen 0 1 &')
def connect_to_elm327(self):
"""
Establish a connection to the ELM327 device.
Returns:
res (obd.OBDStatus): The connection status of the ELM327 device.
"""
res = None
try:
self.initialize_BLE()
self.connection = obd.OBD()
print(self.connection.status())
res = self.connection.status()
if res == obd.OBDStatus.CAR_CONNECTED:
print("----------Connection establishment is successful!----------")
return res
else:
print("----------Connection establishment failed!----------")
print("End program. Please check settings of the computer and ELM327")
except Exception as e:
print("----------Exception!----------")
print(e)
finally:
return res
def get_data_from_sensor(self):
"""
Retrieve data from the sensor.
Returns:
dict: A dictionary containing sensor data.
"""
if self.is_offline:
data = self.get_data_from_sensor_stub()
else:
# Retrieve data and save it in dictionary format
data = {column: self.get_obd2_value(column) for column in self.COLUMNS}
return data
def get_obd2_value_debug(self, column):
"""
Retrieve OBD-II value for a specific column with debug information.
Args:
column (str): The OBD-II command column.
Returns:
float or None: The value of the OBD-II command, or None if not available.
"""
command = getattr(obd.commands, column, None)
if command:
response = self.connection.query(command)
if response:
print(f"Response for command '{command}': {response}")
if response.value is not None: # Check for None
print(f"Response value for command '{command}': {response.value}")
return response.value.magnitude
else:
print(f"No value in response for command '{command}'")
else:
print(f"No response for command '{command}'")
else:
print(f"No command found for column '{column}'")
return None
def get_obd2_value(self, column):
"""
Retrieve OBD-II value for a specific column.
Args:
column (str): The OBD-II command column.
Returns:
float or None: The value of the OBD-II command, or None if not available.
"""
command = getattr(obd.commands, column, None)
if command:
response = self.connection.query(command)
if response.value is not None: # Check for None
return response.value.magnitude
return None
def get_data_from_sensor_stub(self):
"""
Generate stub data for the sensor.
Returns:
dict: A dictionary containing stub sensor data.
"""
data_stub = {column: np.abs(np.random.randn()).astype(np.float32).item() for column in self.COLUMNS}
# Randomly insert None or 0.0
if random.choice([True, False]):
random_column = random.choice(self.COLUMNS)
if random.choice([True, False]):
data_stub[random_column] = None
else:
data_stub[random_column] = 0.0
return data_stub
def format_data_for_display(data, labels):
"""
Format sensor data for display.
Args:
data (dict): The sensor data to format.
labels (list of str): The list of labels to include in the formatted string.
Returns:
str: A formatted string containing the sensor data.
"""
formatted_str = ""
for label, value in zip(labels, data.values()):
if value is None:
value = "None"
else:
value = f"{value:.4f}"
formatted_str += f"{label}: {value} / "
return formatted_str.rstrip(" / ")
def format_sensor_data(data, labels):
"""
Format sensor data for display.
Args:
data (dict or list): The sensor data to format.
labels (list of str): The list of labels to include in the formatted string.
Returns:
str: A formatted string containing the sensor data.
"""
formatted_str = ""
if isinstance(data, dict):
for label in labels:
value = data.get(label, None)
if value is None:
value = "None"
else:
value = f"{value:.4f}"
formatted_str += f"{label}: {value} / "
else:
for label, value in zip(labels, data):
if value is None:
value = "None"
else:
value = f"{value:.4f}"
formatted_str += f"{label}: {value} / "
return formatted_str.rstrip(" / ")
def test_main():
"""
Main function for testing sensor data collection and display.
This function initializes the ELM327 sensor, starts a loop to collect data,
formats the data for display, and prints it in real-time. It also calculates
and prints the sampling delay and reliability rate upon termination.
The main loop runs until interrupted by the user.
Raises:
KeyboardInterrupt: If a keyboard interrupt occurs, the loop is terminated
and the final statistics are printed.
"""
from utils.tools import wait_process
from time import perf_counter
import matplotlib.pyplot as plt
print("Main start")
config = load_config(config_path)
meas_elm327 = ELM327(config.sensors['elm327'])
# res = meas_elm327.connect_to_elm327()
start_time = perf_counter()
sampling_counter = 0
try:
main_loop_start_time = perf_counter()
while True:
iteration_start_time = perf_counter()
# Data acquisition process
data = meas_elm327.get_data_from_sensor()
current_time = perf_counter() - start_time
sampling_counter += 1
if meas_elm327.Is_show_real_time_data:
formatted_data = format_sensor_data(data, meas_elm327.COLUMNS)
print("--------------------------------------------------------------------")
print("Current Time is: {:.3f}".format(current_time))
print(formatted_data)
# Wait to meet the sampling frequency based on the sampling interval and execution time
elapsed_time = perf_counter() - iteration_start_time
sleep_time = meas_elm327.SAMPLING_TIME - elapsed_time
if sleep_time > 0:
wait_process(sleep_time)
except KeyboardInterrupt:
print("Interrupted by user")
finally:
main_loop_end_time = perf_counter() - main_loop_start_time
print("Program terminated")
print("main loop is ended. current time is: {:.3f}".format(current_time))
print("main loop is ended. end time is: {:.3f}".format(main_loop_end_time))
print("sampling num is: {}".format(sampling_counter))
# Calculate the ideal sampling time
ideal_time = ((sampling_counter - 1) / meas_elm327.SAMPLING_FREQUENCY_HZ)
# Calculate the delay
delay_time = current_time - ideal_time
# The reliability rate is the delay divided by the sampling time
sampling_reliability_rate = (delay_time / (sampling_counter / meas_elm327.SAMPLING_FREQUENCY_HZ)) * 100
print("sampling delay is: {:.3f} s".format(delay_time))
print("sampling delay rate is: {:.3f} %".format(sampling_reliability_rate))
if __name__ == '__main__':
test_main()
This script defines an ELM327 class for interfacing with an ELM327 device to collect sensor data via OBD-II. It initializes the connection, retrieves data, and formats it for display. The test_main function sets up the ELM327 sensor, collects data in a loop, and prints it in real-time. It also calculates and displays sampling delay and reliability rates upon interruption. The script handles both real-time data acquisition and simulated offline data for testing purposes.
7. Conclusion
In this post, I described the project focused on developing a measurement system to capture vehicle behavior. While the project is still ongoing, I have recognized the potential for capturing vehicle data with a focus on the vehicle dynamics domain. However, when it comes to measuring signals from vehicle ECUs, some limitations need to be considered, as the ELM327 may not reliably achieve sampling rates beyond 5 Hz with good accuracy. This issue could likely be resolved by using a more advanced OBD scanner, such as the OBDLink MX+.
8. Reference
[1] Adafruit. "Adafruit BNO055 Absolute Orientation Sensor."
https://learn.adafruit.com/adafruit-bno055-absolute-orientation-sensor/overview. Accessed September 3, 2024.
[2] Adafruit. "Adafruit_CircuitPython_BNO055." https://github.com/adafruit/Adafruit_CircuitPython_BNO055. Accessed September 3, 2024.
[3] Adafruit. "Adafruit_BNO055." https://github.com/adafruit/Adafruit_BNO055. Accessed September 3, 2024.
[4] Adafruit. "Adafruit BNO055 Demo." https://cdn-shop.adafruit.com/product-videos/1024x768/2472-04.mp4 Accessed September 3, 2024.
[5] Amazon. "Elm327 Launchh OBD2 Professional Bluetooth Scan Tool and Code Reader for Android and PC, Interface OBDII OBD2 Car Auto Diagnostic Scanner, Not Support J1850 VPW & J1850 PWM". https://a.co/d/5BFn4GN. Accessed September 3, 2024.
[6] MathWorks. "Coordinate Systems in Automated Driving Toolbox." https://www.mathworks.com/help/driving/ug/coordinate-systems.html. Accessed September 3, 2024.
[7] Apple. "Getting raw gyroscope events." https://developer.apple.com/documentation/coremotion/getting_raw_gyroscope_events. Accessed September 3, 2024.
[8] phyphox. "phyphox top page."https://phyphox.org/. Accessed September 3, 2024.
[9] Andrea Patrucco, Vehicle dynamics engineer presso Applus+ IDIADA. "Challenging your car's trip computer fuel efficiency figures." https://www.linkedin.com/pulse/challenging-your-cars-trip-computer-fuel-efficiency-figures-patrucco/. Accessed September 3, 2024.
[10] "Choosing OBDII adapter". https://www.carscanner.info/choosing-obdii-adapter/. Accessed September 3, 2024.
[11] "VDDM". https://github.com/Qooniee/VDDM/tree/master/. Accessed September 3, 2024.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds
 1675
1675
 14
1429
52
1333
25
1278
29
1257
24
14
1429
52
1333
25
1278
29
1257
24

 Python vs C: courbes d'apprentissage et facilité d'utilisation
Apr 19, 2025 am 12:20 AM
Python vs C: courbes d'apprentissage et facilité d'utilisation
Apr 19, 2025 am 12:20 AM
Python est plus facile à apprendre et à utiliser, tandis que C est plus puissant mais complexe. 1. La syntaxe Python est concise et adaptée aux débutants. Le typage dynamique et la gestion automatique de la mémoire le rendent facile à utiliser, mais peuvent entraîner des erreurs d'exécution. 2.C fournit des fonctionnalités de contrôle de bas niveau et avancées, adaptées aux applications haute performance, mais a un seuil d'apprentissage élevé et nécessite une gestion manuelle de la mémoire et de la sécurité.
 Apprendre Python: 2 heures d'étude quotidienne est-elle suffisante?
Apr 18, 2025 am 12:22 AM
Apprendre Python: 2 heures d'étude quotidienne est-elle suffisante?
Apr 18, 2025 am 12:22 AM
Est-ce suffisant pour apprendre Python pendant deux heures par jour? Cela dépend de vos objectifs et de vos méthodes d'apprentissage. 1) Élaborer un plan d'apprentissage clair, 2) Sélectionnez les ressources et méthodes d'apprentissage appropriées, 3) la pratique et l'examen et la consolidation de la pratique pratique et de l'examen et de la consolidation, et vous pouvez progressivement maîtriser les connaissances de base et les fonctions avancées de Python au cours de cette période.
 Python vs. C: Explorer les performances et l'efficacité
Apr 18, 2025 am 12:20 AM
Python vs. C: Explorer les performances et l'efficacité
Apr 18, 2025 am 12:20 AM
Python est meilleur que C dans l'efficacité du développement, mais C est plus élevé dans les performances d'exécution. 1. La syntaxe concise de Python et les bibliothèques riches améliorent l'efficacité du développement. Les caractéristiques de type compilation et le contrôle du matériel de CC améliorent les performances d'exécution. Lorsque vous faites un choix, vous devez peser la vitesse de développement et l'efficacité de l'exécution en fonction des besoins du projet.
 Python vs C: Comprendre les principales différences
Apr 21, 2025 am 12:18 AM
Python vs C: Comprendre les principales différences
Apr 21, 2025 am 12:18 AM
Python et C ont chacun leurs propres avantages, et le choix doit être basé sur les exigences du projet. 1) Python convient au développement rapide et au traitement des données en raison de sa syntaxe concise et de son typage dynamique. 2) C convient à des performances élevées et à une programmation système en raison de son typage statique et de sa gestion de la mémoire manuelle.
 Quelle partie fait partie de la bibliothèque standard Python: listes ou tableaux?
Apr 27, 2025 am 12:03 AM
Quelle partie fait partie de la bibliothèque standard Python: listes ou tableaux?
Apr 27, 2025 am 12:03 AM
PythonlistSaReparmentofthestandardLibrary, tandis que les coloccules de colocède, tandis que les colocculations pour la base de la Parlementaire, des coloments de forage polyvalent, tandis que la fonctionnalité de la fonctionnalité nettement adressée.
 Python: automatisation, script et gestion des tâches
Apr 16, 2025 am 12:14 AM
Python: automatisation, script et gestion des tâches
Apr 16, 2025 am 12:14 AM
Python excelle dans l'automatisation, les scripts et la gestion des tâches. 1) Automatisation: La sauvegarde du fichier est réalisée via des bibliothèques standard telles que le système d'exploitation et la fermeture. 2) Écriture de script: utilisez la bibliothèque PSUTIL pour surveiller les ressources système. 3) Gestion des tâches: utilisez la bibliothèque de planification pour planifier les tâches. La facilité d'utilisation de Python et la prise en charge de la bibliothèque riche en font l'outil préféré dans ces domaines.
 Python pour l'informatique scientifique: un look détaillé
Apr 19, 2025 am 12:15 AM
Python pour l'informatique scientifique: un look détaillé
Apr 19, 2025 am 12:15 AM
Les applications de Python en informatique scientifique comprennent l'analyse des données, l'apprentissage automatique, la simulation numérique et la visualisation. 1.Numpy fournit des tableaux multidimensionnels et des fonctions mathématiques efficaces. 2. Scipy étend la fonctionnalité Numpy et fournit des outils d'optimisation et d'algèbre linéaire. 3. Pandas est utilisé pour le traitement et l'analyse des données. 4.Matplotlib est utilisé pour générer divers graphiques et résultats visuels.
 Python pour le développement Web: applications clés
Apr 18, 2025 am 12:20 AM
Python pour le développement Web: applications clés
Apr 18, 2025 am 12:20 AM
Les applications clés de Python dans le développement Web incluent l'utilisation des cadres Django et Flask, le développement de l'API, l'analyse et la visualisation des données, l'apprentissage automatique et l'IA et l'optimisation des performances. 1. Framework Django et Flask: Django convient au développement rapide d'applications complexes, et Flask convient aux projets petits ou hautement personnalisés. 2. Développement de l'API: Utilisez Flask ou DjangorestFramework pour construire RestulAPI. 3. Analyse et visualisation des données: utilisez Python pour traiter les données et les afficher via l'interface Web. 4. Apprentissage automatique et AI: Python est utilisé pour créer des applications Web intelligentes. 5. Optimisation des performances: optimisée par la programmation, la mise en cache et le code asynchrones
