

Vous êtes-vous déjà demandé comment les drones naviguent dans des environnements complexes ? Dans ce blog, nous allons créer un système de navigation simple pour drones en utilisant Python, Matplotlib et l'algorithme A*. À la fin, vous disposerez d'un système fonctionnel qui visualise un drone résolvant un labyrinthe !
Pour construire notre système de navigation par drone, nous avons besoin des éléments suivants :
Mais d’abord, passons rapidement en revue quelques termes de base de l’IA pour ceux qui sont nouveaux.
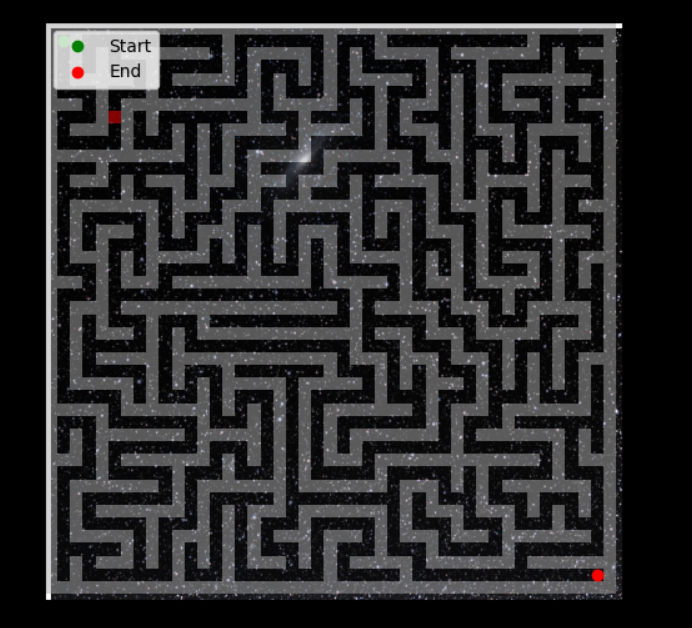
Notre drone naviguera dans un labyrinthe 2D. Le labyrinthe sera composé de :
Les objectifs du drone :
Voici à quoi ressemble le labyrinthe :
Tout d'abord, installez et importez les bibliothèques requises :
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
Définissons la taille du labyrinthe :
python
LARGEUR, HAUTEUR = 22, 22
Dans la navigation réelle, les déplacements dans différentes directions peuvent avoir des coûts variables. Par exemple, se déplacer vers le nord peut être plus difficile que se déplacer vers l'est.
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
On commence par une grille remplie de murs (1s) :
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
Le numpy. La fonction ones() est utilisée pour créer un nouveau tableau de forme et de type donnés, rempli de uns... utile pour initialiser un tableau avec des valeurs par défaut.
Définissons maintenant une fonction qui "taillera" des chemins dans votre labyrinthe qui est actuellement initialisé avec uniquement des murs
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
maze = np.ones((2 * WIDTH + 1, 2 * HEIGHT + 1), dtype=int)
Utilisez Matplotlib pour afficher le labyrinthe :
def carve(x, y):
maze[2 * x + 1, 2 * y + 1] = 0 # Mark current cell as a path
directions = list(DIRECTIONS.items())
random.shuffle(directions) # Randomize directions
for _, (dx, dy) in directions:
nx, ny = x + dx, y + dy
if 0 <= nx < WIDTH and 0 <= ny < HEIGHT and maze[2 * nx + 1, 2 * ny + 1] == 1:
maze[2 * x + 1 + dx, 2 * y + 1 + dy] = 0
carve(nx, ny)
carve(0, 0) # Start carving from the top-left corner
L'algorithme A* trouve le chemin le plus court dans un labyrinthe pondéré en utilisant une combinaison de coût de chemin et d'heuristique.
Nous utilisons la Distance euclidienne comme heuristique :
start = (1, 1) end = (2 * WIDTH - 1, 2 * HEIGHT - 1) maze[start] = 0 maze[end] = 0
fig, ax = plt.subplots(figsize=(8, 6))
ax.imshow(maze, cmap='binary', interpolation='nearest')
ax.set_title("2D Maze")
plt.show()
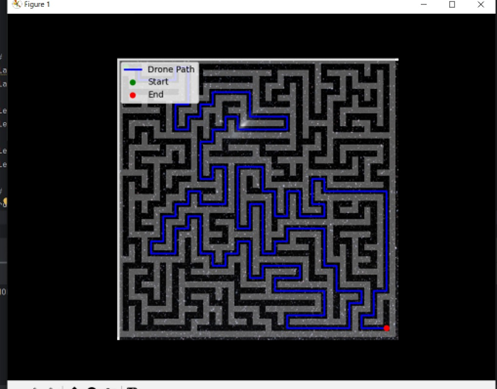
Nous avons le labyrinthe mais vous ne pouvez pas encore voir la trajectoire du drone.
Visualisons la trajectoire du drone :
def heuristic(a, b):
return math.sqrt((a[0] - b[0]) ** 2 + (a[1] - b[1]) ** 2)
Félicitations ! ? Vous avez construit un système de navigation par drone fonctionnel qui :
N'hésitez pas à partager vos résultats ou à poser des questions dans les commentaires ci-dessous.
Vers l'infini et au-delà ?
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
















![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



