
 Périphériques technologiques
IA
Début avec Torchrl pour l'apprentissage en renforcement profond
Périphériques technologiques
IA
Début avec Torchrl pour l'apprentissage en renforcement profond
Début avec Torchrl pour l'apprentissage en renforcement profond


Le renforcement d'apprentissage (RL) s'attaque aux problèmes complexes, des véhicules autonomes aux modèles de langage sophistiqués. Les agents RL apprennent par l'apprentissage du renforcement de la rétroaction humaine (RLHF), adaptant leurs réponses en fonction de l'apport humain. Alors que des frameworks Python comme Keras et Tensorflow sont établis, Pytorch et Pytorch Lightning dominent les nouveaux projets.
Torchrl, une bibliothèque open source, simplifie le développement de RL avec Pytorch. Ce didacticiel montre la configuration de Torchrl, les composants de base et la construction d'un agent RL de base. Nous explorerons des algorithmes prédéfinis comme l'optimisation de la politique proximale (PPO) et les techniques de journalisation et de surveillance essentielles.
Configuration de Torchrl
Cette section vous guide dans l'installation et l'utilisation de Torchrl.
Prérequis
Avant d'installer Torchrl, assurez-vous d'avoir:
- Pytorch: Fondation de Torchrl.
- Gymnase: pour importer des environnements RL. Utilisez la version 0.29.1 (à partir de janvier 2025, les versions ultérieures ont des problèmes de compatibilité avec Torchrl - voir la page des discussions Git pertinentes).
- pygame: pour simuler des environnements RL semblables à un jeu (par exemple, cartpole).
- Tensordict: fournit un conteneur tenseur pour une manipulation efficace du tenseur.
Installez les conditions préalables:
!pip install torch tensordict gymnasium==0.29.1 pygame
Installation de Torchrl
Installez Torchrl à l'aide de PIP. Un environnement conda est recommandé pour les ordinateurs personnels ou les serveurs.
!pip install torchrl
Vérification
Testez votre installation en important torchrl dans un shell ou un cahier Python. Utilisez check_env_specs() pour vérifier la compatibilité de l'environnement (par exemple, cartpole):
import torchrl
from torchrl.envs import GymEnv
from torchrl.envs.utils import check_env_specs
check_env_specs(GymEnv("CartPole-v1"))Une installation réussie s'affiche:
<code>[torchrl][INFO] check_env_specs succeeded!</code>
Composants Torchrl de clé
Avant la création d'agents, examinons les éléments principaux de Torchrl.
Environnements
Torchrl fournit une API cohérente pour divers environnements, enveloppez des fonctions spécifiques à l'environnement en emballages standard. Cela simplifie l'interaction:
- Torchrl convertit les états, les actions et les récompenses en tenseurs pytorch.
- Prétraitement / post-traitement (normalisation, mise à l'échelle, formatage) est facilement appliqué.
Créez un environnement de gymnase en utilisant GymEnv:
env = GymEnv("CartPole-v1")transforme
Améliorer les environnements avec des modules complémentaires (par exemple, des compteurs de pas) en utilisant TransformedEnv:
from torchrl.envs import GymEnv, StepCounter, TransformedEnv
env = TransformedEnv(GymEnv("CartPole-v1"), StepCounter()) La normalisation est obtenue avec ObservationNorm:
from torchrl.envs import Compose
base_env = GymEnv('CartPole-v1', device=device)
env = TransformedEnv(
base_env,
Compose(
ObservationNorm(in_keys=["observation"]),
StepCounter()
)
) Les transformations multiples sont combinées en utilisant Compose.
Agents et politiques
L'agent utilise une politique pour sélectionner des actions en fonction de l'état de l'environnement, visant à maximiser les récompenses cumulatives.
Une stratégie aléatoire simple est créée en utilisant RandomPolicy:
!pip install torch tensordict gymnasium==0.29.1 pygame
Construire votre premier agent RL
Cette section démontre la construction d'un agent RL simple.
Importer les packages nécessaires:
!pip install torchrl
Étape 1: Définissez l'environnement
Nous utiliserons l'environnement de cartpole:
import torchrl
from torchrl.envs import GymEnv
from torchrl.envs.utils import check_env_specs
check_env_specs(GymEnv("CartPole-v1"))Définir les hyperparamètres:
<code>[torchrl][INFO] check_env_specs succeeded!</code>
Étape 2: Créez la politique
Définir une politique de réseau neuronal simple:
env = GymEnv("CartPole-v1")Étape 3: Former l'agent
Créer un collecteur de données et un tampon de relecture:
from torchrl.envs import GymEnv, StepCounter, TransformedEnv
env = TransformedEnv(GymEnv("CartPole-v1"), StepCounter())Définir les modules de formation:
from torchrl.envs import Compose
base_env = GymEnv('CartPole-v1', device=device)
env = TransformedEnv(
base_env,
Compose(
ObservationNorm(in_keys=["observation"]),
StepCounter()
)
)Implémentez la boucle de formation (simplifiée pour la concision):
import torchrl
import torch
from tensordict import TensorDict
from torchrl.data.tensor_specs import Bounded
action_spec = Bounded(-torch.ones(1), torch.ones(1))
actor = torchrl.envs.utils.RandomPolicy(action_spec=action_spec)
td = actor(TensorDict({}, batch_size=[]))
print(td.get("action"))Étape 4: Évaluez l'agent
Ajouter une évaluation et une journalisation à la boucle de formation (simplifiée):
import time import matplotlib.pyplot as plt from torchrl.envs import GymEnv, StepCounter, TransformedEnv from tensordict.nn import TensorDictModule as TensorDict, TensorDictSequential as Seq from torchrl.modules import EGreedyModule, MLP, QValueModule from torchrl.objectives import DQNLoss, SoftUpdate from torchrl.collectors import SyncDataCollector from torchrl.data import LazyTensorStorage, ReplayBuffer from torch.optim import Adam from torchrl._utils import logger as torchrl_logger
Imprimer le temps de formation et les résultats de l'intrigue:
env = TransformedEnv(GymEnv("CartPole-v1"), StepCounter())
torch.manual_seed(0)
env.set_seed(0)(l'implémentation complète du DQN est disponible dans le manuel de données référencé.)
Exploration des algorithmes prédéfinis
Torchrl propose des algorithmes pré-construits (DQN, DDPG, SAC, PPO, etc.). Cette section démontre l'utilisation de PPO.
Importer les modules nécessaires:
INIT_RAND_STEPS = 5000 FRAMES_PER_BATCH = 100 OPTIM_STEPS = 10 EPS_0 = 0.5 BUFFER_LEN = 100_000 ALPHA = 0.05 TARGET_UPDATE_EPS = 0.95 REPLAY_BUFFER_SAMPLE = 128 LOG_EVERY = 1000 MLP_SIZE = 64
Définir les hyperparamètres:
value_mlp = MLP(out_features=env.action_spec.shape[-1], num_cells=[MLP_SIZE, MLP_SIZE])
value_net = TensorDict(value_mlp, in_keys=["observation"], out_keys=["action_value"])
policy = Seq(value_net, QValueModule(spec=env.action_spec))
exploration_module = EGreedyModule(
env.action_spec, annealing_num_steps=BUFFER_LEN, eps_init=EPS_0
)
policy_explore = Seq(policy, exploration_module)(L'implémentation de PPO restante, y compris les définitions de réseau, la collecte de données, la fonction de perte, l'optimisation et la boucle de formation, suit une structure similaire à la réponse originale mais est omise ici par concision. Reportez-vous à la réponse d'origine pour le code complet.)
Visualiser et déboguer
Surveiller les progrès de la formation à l'aide de Tensorboard:
collector = SyncDataCollector(
env,
policy_explore,
frames_per_batch=FRAMES_PER_BATCH,
total_frames=-1,
init_random_frames=INIT_RAND_STEPS,
)
rb = ReplayBuffer(storage=LazyTensorStorage(BUFFER_LEN)) Visualisez avec: tensorboard --logdir="training_logs"
Le débogage consiste à vérifier les spécifications de l'environnement:
loss = DQNLoss(value_network=policy, action_space=env.action_spec, delay_value=True) optim = Adam(loss.parameters(), lr=ALPHA) updater = SoftUpdate(loss, eps=TARGET_UPDATE_EPS)
Échantillons d'observations et d'actions:
total_count = 0
total_episodes = 0
t0 = time.time()
success_steps = []
for i, data in enumerate(collector):
rb.extend(data)
# ... (training steps, similar to the original response) ... visualiser les performances de l'agent en rendant une vidéo (nécessite torchvision et av):
# ... (training steps) ...
if total_count > 0 and total_count % LOG_EVERY == 0:
torchrl_logger.info(f"Successful steps: {max_length}, episodes: {total_episodes}")
if max_length > 475:
print("TRAINING COMPLETE")
breakmeilleures pratiques
- Commencez par des environnements simples (comme Cartpole).
- Expérimentez avec des hyperparamètres (recherche de grille, recherche aléatoire, outils automatisés).
- Tirez parti des algorithmes pré-construits chaque fois que possible.
Conclusion
Ce tutoriel a fourni une introduction complète à Torchrl, présentant ses capacités via des exemples DQN et PPO. Expérimentez avec différents environnements et algorithmes pour améliorer encore vos compétences RL. Les ressources référencées offrent des opportunités d'apprentissage supplémentaires.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Meilleurs générateurs d'art AI (gratuit & amp; payé) pour des projets créatifs
Apr 02, 2025 pm 06:10 PM
Meilleurs générateurs d'art AI (gratuit & amp; payé) pour des projets créatifs
Apr 02, 2025 pm 06:10 PM
L'article passe en revue les meilleurs générateurs d'art AI, discutant de leurs fonctionnalités, de leur aptitude aux projets créatifs et de la valeur. Il met en évidence MidJourney comme la meilleure valeur pour les professionnels et recommande Dall-E 2 pour un art personnalisable de haute qualité.
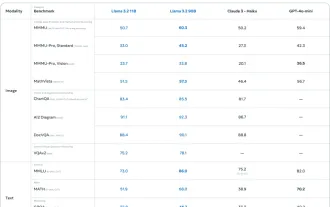
 Début avec Meta Llama 3.2 - Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
Début avec Meta Llama 3.2 - Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
META'S LLAMA 3.2: un bond en avant dans l'IA multimodal et mobile Meta a récemment dévoilé Llama 3.2, une progression importante de l'IA avec de puissantes capacités de vision et des modèles de texte légers optimisés pour les appareils mobiles. S'appuyer sur le succès o
 Meilleurs chatbots AI comparés (Chatgpt, Gemini, Claude & amp; plus)
Apr 02, 2025 pm 06:09 PM
Meilleurs chatbots AI comparés (Chatgpt, Gemini, Claude & amp; plus)
Apr 02, 2025 pm 06:09 PM
L'article compare les meilleurs chatbots d'IA comme Chatgpt, Gemini et Claude, en se concentrant sur leurs fonctionnalités uniques, leurs options de personnalisation et leurs performances dans le traitement et la fiabilité du langage naturel.
 Assistants d'écriture de l'IA pour augmenter votre création de contenu
Apr 02, 2025 pm 06:11 PM
Assistants d'écriture de l'IA pour augmenter votre création de contenu
Apr 02, 2025 pm 06:11 PM
L'article traite des meilleurs assistants d'écriture d'IA comme Grammarly, Jasper, Copy.ai, WireSonic et Rytr, en se concentrant sur leurs fonctionnalités uniques pour la création de contenu. Il soutient que Jasper excelle dans l'optimisation du référencement, tandis que les outils d'IA aident à maintenir le ton
 Vendre une stratégie d'IA aux employés: le manifeste du PDG de Shopify
Apr 10, 2025 am 11:19 AM
Vendre une stratégie d'IA aux employés: le manifeste du PDG de Shopify
Apr 10, 2025 am 11:19 AM
La récente note du PDG de Shopify Tobi Lütke déclare hardiment la maîtrise de l'IA une attente fondamentale pour chaque employé, marquant un changement culturel important au sein de l'entreprise. Ce n'est pas une tendance éphémère; C'est un nouveau paradigme opérationnel intégré à P
 AV Bytes: Meta & # 039; S Llama 3.2, Google's Gemini 1.5, et plus
Apr 11, 2025 pm 12:01 PM
AV Bytes: Meta & # 039; S Llama 3.2, Google's Gemini 1.5, et plus
Apr 11, 2025 pm 12:01 PM
Le paysage de l'IA de cette semaine: un tourbillon de progrès, de considérations éthiques et de débats réglementaires. Les principaux acteurs comme Openai, Google, Meta et Microsoft ont déclenché un torrent de mises à jour, des nouveaux modèles révolutionnaires aux changements cruciaux de LE
 10 extensions de codage générateur AI dans le code vs que vous devez explorer
Apr 13, 2025 am 01:14 AM
10 extensions de codage générateur AI dans le code vs que vous devez explorer
Apr 13, 2025 am 01:14 AM
Hé là, codant ninja! Quelles tâches liées au codage avez-vous prévues pour la journée? Avant de plonger plus loin dans ce blog, je veux que vous réfléchissiez à tous vos malheurs liés au codage - les énumérez. Fait? - Let & # 8217
 Choisir le meilleur générateur de voix d'IA: les meilleures options examinées
Apr 02, 2025 pm 06:12 PM
Choisir le meilleur générateur de voix d'IA: les meilleures options examinées
Apr 02, 2025 pm 06:12 PM
L'article examine les meilleurs générateurs de voix d'IA comme Google Cloud, Amazon Polly, Microsoft Azure, IBM Watson et Descript, en se concentrant sur leurs fonctionnalités, leur qualité vocale et leur aptitude à différents besoins.
