
 interface Web
js tutoriel
Explication détaillée des méthodes de fonctionnement de base de Python-OpenCV_python
interface Web
js tutoriel
Explication détaillée des méthodes de fonctionnement de base de Python-OpenCV_python
Explication détaillée des méthodes de fonctionnement de base de Python-OpenCV_python

L'éditeur suivant partagera avec vous une explication détaillée des méthodes de fonctionnement de base de Python-OpenCV. Il a une bonne valeur de référence et j'espère qu'il sera utile à tout le monde. Suivons l'éditeur pour jeter un oeil
Attributs de base
cv2.imread (nom du fichier, attributs) lire l'image
Attribut : Spécifiez comment l'image est lue à partir du fichier
cv2.IMREAD_COLOR : Lecture en images couleur, paramètres par défaut, Opencv lit les images couleur en mode BGR ! ! ! Remarque
cv2.IMREAD_GRAYSCALE : Lire dans les images en niveaux de gris.
cv2.imshow (nom de la fenêtre, fichier image) Afficher l'image
Peut créer plusieurs fenêtres
fonction de liaison clavier cv2.waitKey()
La fonction attend un nombre spécifique de millisecondes pour voir s'il y a une saisie depuis le clavier.
cv2.namedWindow (nom de la fenêtre, attributs) Créer une fenêtre
Attributs : Spécifier le mode de taille de la fenêtre
cv2.WINDOW_AUTOSIZE : Automatiquement basé sur l'image size Créer la taille
cv2.WINDOW_NORMAL : la taille de la fenêtre peut être ajustée
cv2.destoryAllWindows(nom de la fenêtre) Supprimer toute fenêtre créée
Exemple de code :
import cv2 img=cv2.imread('test.py',cv2.IMREAD_COLOR) cv2.namedWindow('image',cv2.WINDOW_NORMAL) cv2.imshow('image',img) cv2.waitKey(0) cv2.destoryAllWindows()
cv2.imwrite (enregistrer le nom de l'image, besoin d'enregistrer l'image) Enregistrer l'image
Exemple de code :
import cv2 img=cv2.imread('test.png',0) cv2.imshow('image',img) k=cv2.waitKey(0) if k==27: #等待 ESC 键 cv2.destoryAllWindows() elif k==ord('s') #等待 's' 键来保存和退出 cv2.imwrite('messigray.png',img) cv2.destoryAllWindows()
Quelques opérations sur les images
0x01. 🎜 >
import cv2 img=img.imread('test.png') print img.shape #(768,1024,3) print img.size #2359296 768*1024*3 print img.dtype #uint8
Lors du traitement des images, transférez directement certaines informations. Sortie sur l'image sous forme de texte
cv2.putText (nom de l'image, texte, coordonnées, couleur du texte) Zoom image<🎜. > Réaliser et sauvegarder des images, opération courante lors de l'utilisation d'OpenCV. cv2.resize() prend en charge une variété d'algorithmes d'interpolation. Par défaut, cv2.INTER_LINEAR est utilisé. Le plus approprié pour la réduction est cv2.INTER_AREA. Le plus approprié pour l'agrandissement est cv2.INTER_CUBIC ou cv2.INTER_LINEAR.
Ou :res=cv2.resize(image,(2*width,2*height),interpolation=cv2.INTER_CUBIC)
res=cv2.resize(image,None,fx=2,fy=2,interpolation=cv2.INTER_CUBIC)
0x04 est défini plus tard. Traduction de l'image
<. 🎜>
La traduction consiste à changer la position de l'image. Si vous souhaitez vous déplacer dans la direction (x, y) et que la distance de mouvement est (tx, ty), vous devez construire une matrice de décalage M.
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
Par exemple, faites un panoramique sur l'image (100,50) 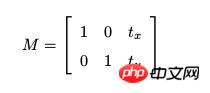
Où (cols, rows) représente la taille de l'image de sortie, M est la matrice de transformation, 100 représente le décalage de x et 50 représente le décalage de y, en pixels.
import cv2 img=cv2.imread('test.png',1) rows,cols,channel=img.shape M=np.float32([[1,0,100],[0,1,50]]) dst=cv2.warpAffine(img,M,(cols,rows)) cv2.imshow('img',dst) cv2.waitKey(0) cv2.destoryALLWindows()
Dans OpenCV, vous devez d'abord construire une matrice de rotation, qui est obtenue via cv2.getRotationMatrix2D.
import cv2 img=cv2.imread('test.png',0) rows,cols=img.shape #第一个参数为旋转中心,第二个为旋转角度,第三个为旋转后的缩放因子 M=cv2.getRotationMatrix2D((cols/2,rows/2),45,0.6) #第三个参数为图像的尺寸中心 dst=cv2.warpAffine(img,M,(2*cols,2*rows)) cv2.imshow('img',dst) cv2.waitKey(0) cv2.destoryALLWindows()
En transformation affine, Toutes les droites parallèles. dans l'image originale sont également parallèles dans l'image résultante. Pour créer la matrice de décalage, vous devez trouver trois points dans l'image d'origine et leurs positions dans l'image de sortie. Ensuite, OpenCV fournit cv2.getAffineTransform pour créer une matrice 2*3, et transmet enfin la matrice à la fonction cv2.warpAffine.
import cv2 import matplotlib.pyplot as plt import numpy as np img=cv2.imread('test.png') rows,cols,ch=img.shape pts1=np.float32([[50,50],[200,50],[50,200]]) pts2=np.float32([[10,100],[200,50],[100,250]]) M=cv2.getAffineTransform(pts1,pts2) dst=cv2.warpAffine(img,M,(cols,rows)) plt.subplot(121),plt.imshow(img),plt.title('Input') plt.subplot(122),plt.imshow(dst),plt.title('Output') plt.show()
0x07. 🎜>La transformation de perspective nécessite une matrice de transformation 3*3. Assurez-vous que la ligne droite est toujours droite avant et après la transformation. La construction de cette matrice nécessite de trouver 4 points dans l'image d'entrée et leurs positions correspondantes dans l'image de sortie. Trois de ces quatre points ne peuvent pas être colinéaires. La matrice de transformation OpenCV fournit la construction cv2.getPerspectiveTransform(). Passez ensuite la matrice dans la fonction cv2.warpPerspective. 
0x09. Image des régions d'intérêt
import cv2 import numpy as np import matplotlib.pyplot as plt img=cv2.imread('test.png') rows,cols,ch=img.shape pts1=np.float32([[56,65],[368,52],[28,387],[389,390]]) pts2=np.float32([[0,0],[300,0],[0,300],[300,300]]) M=cv2.getPerspectiveTransform(pts1,pts2) dst=cv2.warpPerspective(img,M,(300,300)) plt.subplot(121),plt.imshow(img),plt.title('Input') plt.subplot(122),plt.imshow(dst),plt.title('Output') plt.show()
<🎜. >
Parfois il est nécessaire d'opérer sur une zone précise d'une image, et le ROI est obtenu grâce à l'index Numpy.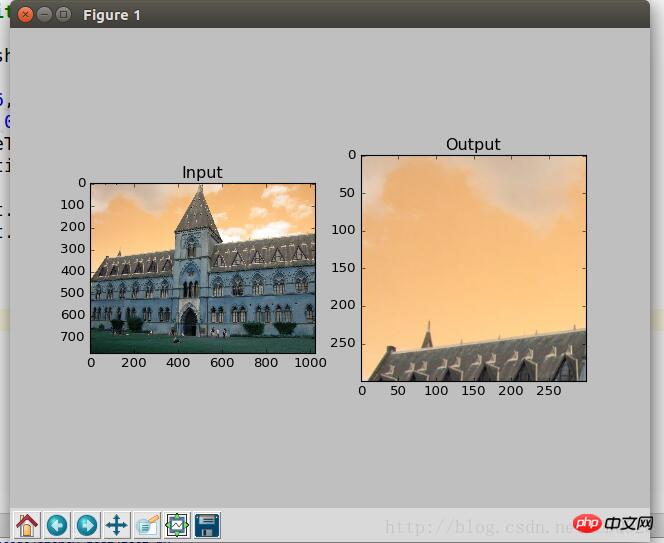
0x10. Traitement de division/fusion de canaux
import cv2
import numpy as np
import matplotlib.pyplot as plt
image=cv2.imread('test.png')
rows,cols,ch=image.shape
tall=image[0:100,300:700]
image[0:100,600:1000]=tallall
cv2.imshow("image",image)
cv2.waitKey(0)
cv2.destoryALLWindows()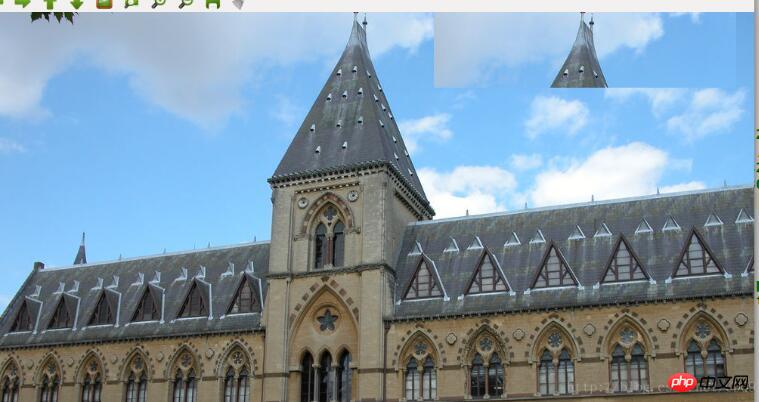
Utiliser la version de l'index Numpy :
import cv2 import numpy as np import matplotlib.pyplot as plt image=cv2.imread('pitt1.jpg') rows,cols,ch=image.shape #直接获取 b=img[:,:,0]
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 MySQL doit-il payer
Apr 08, 2025 pm 05:36 PM
MySQL doit-il payer
Apr 08, 2025 pm 05:36 PM
MySQL a une version communautaire gratuite et une version d'entreprise payante. La version communautaire peut être utilisée et modifiée gratuitement, mais le support est limité et convient aux applications avec des exigences de stabilité faibles et des capacités techniques solides. L'Enterprise Edition fournit une prise en charge commerciale complète pour les applications qui nécessitent une base de données stable, fiable et haute performance et disposées à payer pour le soutien. Les facteurs pris en compte lors du choix d'une version comprennent la criticité des applications, la budgétisation et les compétences techniques. Il n'y a pas d'option parfaite, seulement l'option la plus appropriée, et vous devez choisir soigneusement en fonction de la situation spécifique.
 Comment utiliser MySQL après l'installation
Apr 08, 2025 am 11:48 AM
Comment utiliser MySQL après l'installation
Apr 08, 2025 am 11:48 AM
L'article présente le fonctionnement de la base de données MySQL. Tout d'abord, vous devez installer un client MySQL, tel que MySQLWorkBench ou le client de ligne de commande. 1. Utilisez la commande MySQL-UROot-P pour vous connecter au serveur et connecter avec le mot de passe du compte racine; 2. Utilisez Createdatabase pour créer une base de données et utilisez Sélectionner une base de données; 3. Utilisez CreateTable pour créer une table, définissez des champs et des types de données; 4. Utilisez InsertInto pour insérer des données, remettre en question les données, mettre à jour les données par mise à jour et supprimer les données par Supprimer. Ce n'est qu'en maîtrisant ces étapes, en apprenant à faire face à des problèmes courants et à l'optimisation des performances de la base de données que vous pouvez utiliser efficacement MySQL.
 MySQL ne peut pas être installé après le téléchargement
Apr 08, 2025 am 11:24 AM
MySQL ne peut pas être installé après le téléchargement
Apr 08, 2025 am 11:24 AM
Les principales raisons de la défaillance de l'installation de MySQL sont les suivantes: 1. Problèmes d'autorisation, vous devez s'exécuter en tant qu'administrateur ou utiliser la commande sudo; 2. Des dépendances sont manquantes et vous devez installer des packages de développement pertinents; 3. Conflits du port, vous devez fermer le programme qui occupe le port 3306 ou modifier le fichier de configuration; 4. Le package d'installation est corrompu, vous devez télécharger et vérifier l'intégrité; 5. La variable d'environnement est mal configurée et les variables d'environnement doivent être correctement configurées en fonction du système d'exploitation. Résolvez ces problèmes et vérifiez soigneusement chaque étape pour installer avec succès MySQL.
 Le fichier de téléchargement MySQL est endommagé et ne peut pas être installé. Réparer la solution
Apr 08, 2025 am 11:21 AM
Le fichier de téléchargement MySQL est endommagé et ne peut pas être installé. Réparer la solution
Apr 08, 2025 am 11:21 AM
Le fichier de téléchargement mysql est corrompu, que dois-je faire? Hélas, si vous téléchargez MySQL, vous pouvez rencontrer la corruption des fichiers. Ce n'est vraiment pas facile ces jours-ci! Cet article expliquera comment résoudre ce problème afin que tout le monde puisse éviter les détours. Après l'avoir lu, vous pouvez non seulement réparer le package d'installation MySQL endommagé, mais aussi avoir une compréhension plus approfondie du processus de téléchargement et d'installation pour éviter de rester coincé à l'avenir. Parlons d'abord de la raison pour laquelle le téléchargement des fichiers est endommagé. Il y a de nombreuses raisons à cela. Les problèmes de réseau sont le coupable. L'interruption du processus de téléchargement et l'instabilité du réseau peut conduire à la corruption des fichiers. Il y a aussi le problème avec la source de téléchargement elle-même. Le fichier serveur lui-même est cassé, et bien sûr, il est également cassé si vous le téléchargez. De plus, la numérisation excessive "passionnée" de certains logiciels antivirus peut également entraîner une corruption des fichiers. Problème de diagnostic: déterminer si le fichier est vraiment corrompu
 Comment optimiser les performances MySQL pour les applications de haute charge?
Apr 08, 2025 pm 06:03 PM
Comment optimiser les performances MySQL pour les applications de haute charge?
Apr 08, 2025 pm 06:03 PM
Guide d'optimisation des performances de la base de données MySQL dans les applications à forte intensité de ressources, la base de données MySQL joue un rôle crucial et est responsable de la gestion des transactions massives. Cependant, à mesure que l'échelle de l'application se développe, les goulots d'étranglement des performances de la base de données deviennent souvent une contrainte. Cet article explorera une série de stratégies efficaces d'optimisation des performances MySQL pour garantir que votre application reste efficace et réactive dans des charges élevées. Nous combinerons des cas réels pour expliquer les technologies clés approfondies telles que l'indexation, l'optimisation des requêtes, la conception de la base de données et la mise en cache. 1. La conception de l'architecture de la base de données et l'architecture optimisée de la base de données sont la pierre angulaire de l'optimisation des performances MySQL. Voici quelques principes de base: sélectionner le bon type de données et sélectionner le plus petit type de données qui répond aux besoins peut non seulement économiser un espace de stockage, mais également améliorer la vitesse de traitement des données.
 Comment optimiser les performances de la base de données après l'installation de MySQL
Apr 08, 2025 am 11:36 AM
Comment optimiser les performances de la base de données après l'installation de MySQL
Apr 08, 2025 am 11:36 AM
L'optimisation des performances MySQL doit commencer à partir de trois aspects: configuration d'installation, indexation et optimisation des requêtes, surveillance et réglage. 1. Après l'installation, vous devez ajuster le fichier my.cnf en fonction de la configuration du serveur, tel que le paramètre innodb_buffer_pool_size, et fermer query_cache_size; 2. Créez un index approprié pour éviter les index excessifs et optimiser les instructions de requête, telles que l'utilisation de la commande Explication pour analyser le plan d'exécution; 3. Utilisez le propre outil de surveillance de MySQL (ShowProcessList, Showstatus) pour surveiller la santé de la base de données, et sauvegarde régulièrement et organisez la base de données. Ce n'est qu'en optimisant en continu ces étapes que les performances de la base de données MySQL peuvent être améliorées.
 MySQL a-t-il besoin d'Internet
Apr 08, 2025 pm 02:18 PM
MySQL a-t-il besoin d'Internet
Apr 08, 2025 pm 02:18 PM
MySQL peut s'exécuter sans connexions réseau pour le stockage et la gestion des données de base. Cependant, la connexion réseau est requise pour l'interaction avec d'autres systèmes, l'accès à distance ou l'utilisation de fonctionnalités avancées telles que la réplication et le clustering. De plus, les mesures de sécurité (telles que les pare-feu), l'optimisation des performances (choisissez la bonne connexion réseau) et la sauvegarde des données sont essentielles pour se connecter à Internet.
 Solutions au service qui ne peuvent pas être démarrées après l'installation de MySQL
Apr 08, 2025 am 11:18 AM
Solutions au service qui ne peuvent pas être démarrées après l'installation de MySQL
Apr 08, 2025 am 11:18 AM
MySQL a refusé de commencer? Ne paniquez pas, vérifions-le! De nombreux amis ont découvert que le service ne pouvait pas être démarré après avoir installé MySQL, et ils étaient si anxieux! Ne vous inquiétez pas, cet article vous emmènera pour le faire face calmement et découvrez le cerveau derrière! Après l'avoir lu, vous pouvez non seulement résoudre ce problème, mais aussi améliorer votre compréhension des services MySQL et vos idées de problèmes de dépannage, et devenir un administrateur de base de données plus puissant! Le service MySQL n'a pas réussi et il y a de nombreuses raisons, allant des erreurs de configuration simples aux problèmes système complexes. Commençons par les aspects les plus courants. Connaissances de base: une brève description du processus de démarrage du service MySQL Service Startup. Autrement dit, le système d'exploitation charge les fichiers liés à MySQL, puis démarre le démon mysql. Cela implique la configuration
