

Python utilise OpenCV pour l'étalonnage

Cet article présente principalement l'utilisation d'OpenCV pour le calibrage en Python. Maintenant, je le partage avec tout le monde. Les amis dans le besoin peuvent s'y référer
Cet article combine les exemples officiels d'OpenCV. fournissez un échantillon officiel. Modifiez le code dans l'exemple afin qu'il puisse fonctionner normalement et effectuez des expériences et des explications sur les données que vous avez collectées.
1. Préparation
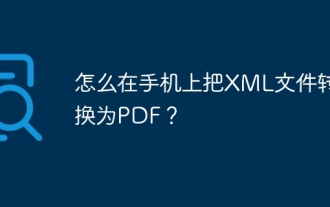
OpenCV utilise un damier pour le calibrage, comme le montre la figure ci-dessous. Afin de calibrer la caméra, nous devons saisir une série de points 3D et leurs points d'image 2D correspondants. Sur un damier noir et blanc, les points d'image bidimensionnels sont facilement trouvés grâce à la détection des coins. Qu’en est-il des points tridimensionnels dans le monde réel ? Au cours de notre collecte, nous avons placé l'appareil photo au même endroit, déplacé la plaque d'étalonnage en damier dans différentes positions, puis l'avons photographié. Nous devons donc connaître la valeur de (X,Y,Z). Mais pour faire simple, on définit le plan où se situe le damier comme le plan XY, c'est-à-dire Z=0. Pour le tableau d'étalonnage, nous pouvons connaître la taille du carré du damier, par exemple 30 mm, nous pouvons donc définir les coordonnées des points d'angle sur le damier comme (0,0,0), (30,0,0), ( 60, 0,0),..., l'unité de ce résultat est le mm.
Les points 3D sont appelés points objets, et les points image 2D sont appelés points image.
2. Détection des points d'angle du damier
Afin de trouver le modèle de damier, nous utilisons openCV La fonction cv2.findChessboardCorners(). Nous devons également indiquer au programme quelles sont les spécifications du modèle que nous utilisons, comme un damier 8*8 ou un damier 5*5. Il est recommandé d'utiliser un modèle de damier avec des nombres inégaux dans les directions x et y. Dans l'expérience suivante, nous utilisons un damier 10*7. Chaque carré a une longueur de côté de 20 mm, ce qui signifie qu'il contient 9*6 coins internes. Si cette fonction détecte le modèle, elle renverra le point d'angle correspondant et renverra true. Bien entendu, toutes les images ne parviennent pas à trouver le modèle requis, nous pouvons donc utiliser plusieurs images pour l'étalonnage. En plus d'utiliser un damier, nous pouvons également utiliser une matrice de points, et la fonction correspondante est cv2.findCirclesGrid().
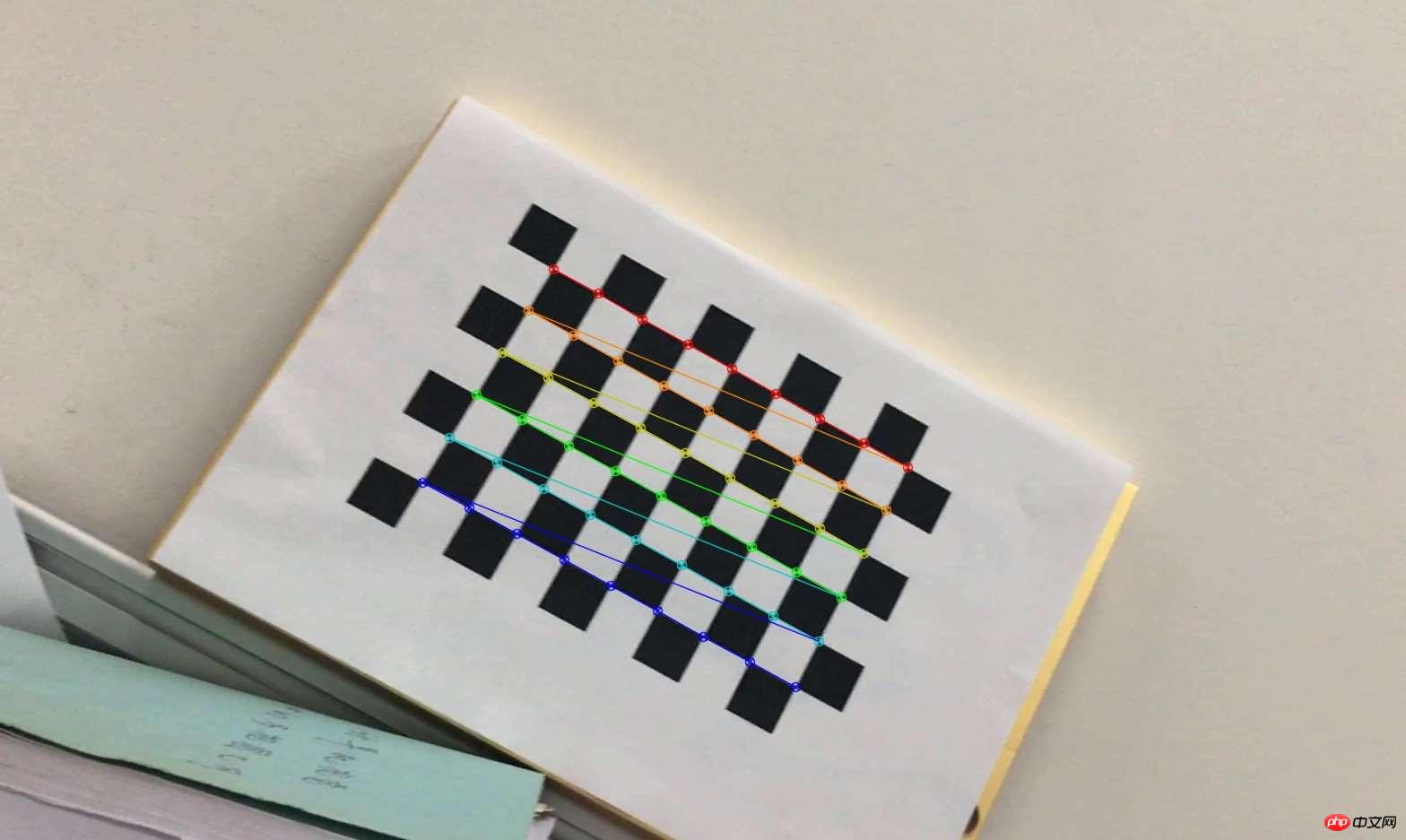
Après avoir trouvé le point d'angle, nous pouvons utiliser cv2.cornerSubPix() pour obtenir des coordonnées plus précises des pixels d'angle. Nous pouvons également utiliser cv2.drawChessboardCorners() pour dessiner les coins sur l'image à afficher. Comme le montre la figure ci-dessous :
3. Par les étapes ci-dessus. , nous obtenons les points tridimensionnels utilisés pour l'étalonnage et les paires de points bidimensionnels correspondantes sur l'image. Nous utilisons cv2.calibrateCamera() pour l'étalonnage. Cette fonction renverra le résultat de l'étalonnage, la matrice des paramètres internes de la caméra, le coefficient de distorsion, la matrice de rotation et le vecteur de translation.
4. Dé-distorsion
Dans la troisième étape, nous avons obtenu les paramètres intrinsèques de la caméra et les coefficients de distorsion. image, nous pouvons également utiliser cv.getOptimalNewCameraMatrix() pour optimiser les paramètres internes et les coefficients de distorsion en définissant le facteur d'échelle libre alpha. Lorsque alpha est défini sur 0, un paramètre interne tronqué et un coefficient de distorsion qui supprime les pixels indésirables après la dédistorsion seront renvoyés ; lorsque alpha est défini sur 1, un paramètre interne tronqué contenant des paramètres et des coefficients de distorsion supplémentaires sera renvoyé. un retour sur investissement pour le recadrer. Ensuite, nous pouvons utiliser la matrice de paramètres internes et le coefficient de distorsion nouvellement obtenus pour déformer l'image. Il existe deux méthodes pour supprimer la distorsion :
(1) Utilisez cv2.undistort()C'est la méthode la plus directe, appelez simplement la fonction directement. image, qui peut être recadrée en utilisant le ROI ci-dessus. Le code est le suivant :
L'image suivante montre le résultat de la dédistorsion d'une image et de la conservation des pixels noirs :# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
(2) Utiliser le remmaping
Il s'agit d'une méthode en deux étapes, calculez d'abord un mappage de l'image déformée à l'image non déformée image, puis utilisez Cette relation de mappage déforme l'image. Le code est le suivant :
# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
5. Erreur de rétroprojection
En rétroprojectant l'erreur, on peut évaluer la qualité des résultats. Plus le résultat est proche de 0, plus le résultat est idéal. À l'aide de la matrice de paramètres internes, du coefficient de distorsion, de la matrice de rotation et du vecteur de translation précédemment calculés, utilisez cv2.projectPoints() pour calculer la projection du point tridimensionnel sur l'image bidimensionnelle, puis calculez l'erreur entre le point obtenu par rétroprojection et le point détecté sur l'image. Enfin, une erreur moyenne pour toutes les images de calibrage est calculée, et cette valeur est l'erreur de rétroprojection. Code
Le code de toutes les étapes est le suivant :
Recommandations associées :#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
Les données dans OpenCVcv::Mat sont écrites dans le fichier txt
Opérations de lecture et d'écriture des données des fichiers OpenCV cv.Mat et .txt
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Y a-t-il une application mobile qui peut convertir XML en PDF?
Apr 02, 2025 pm 08:54 PM
Y a-t-il une application mobile qui peut convertir XML en PDF?
Apr 02, 2025 pm 08:54 PM
Une application qui convertit le XML directement en PDF ne peut être trouvée car ce sont deux formats fondamentalement différents. XML est utilisé pour stocker des données, tandis que PDF est utilisé pour afficher des documents. Pour terminer la transformation, vous pouvez utiliser des langages de programmation et des bibliothèques telles que Python et ReportLab pour analyser les données XML et générer des documents PDF.
 Existe-t-il une application mobile qui peut convertir XML en PDF?
Apr 02, 2025 pm 09:45 PM
Existe-t-il une application mobile qui peut convertir XML en PDF?
Apr 02, 2025 pm 09:45 PM
Il n'y a pas d'application qui peut convertir tous les fichiers XML en PDF car la structure XML est flexible et diversifiée. Le noyau de XML à PDF est de convertir la structure des données en une disposition de page, ce qui nécessite l'analyse du XML et la génération de PDF. Les méthodes courantes incluent l'analyse de XML à l'aide de bibliothèques Python telles que ElementTree et la génération de PDF à l'aide de la bibliothèque ReportLab. Pour le XML complexe, il peut être nécessaire d'utiliser des structures de transformation XSLT. Lorsque vous optimisez les performances, envisagez d'utiliser multithread ou multiprocesses et sélectionnez la bibliothèque appropriée.
 La vitesse de conversion est-elle rapide lors de la conversion du XML en PDF sur le téléphone mobile?
Apr 02, 2025 pm 10:09 PM
La vitesse de conversion est-elle rapide lors de la conversion du XML en PDF sur le téléphone mobile?
Apr 02, 2025 pm 10:09 PM
La vitesse du XML mobile à PDF dépend des facteurs suivants: la complexité de la structure XML. Méthode de conversion de configuration du matériel mobile (bibliothèque, algorithme) Méthodes d'optimisation de la qualité du code (sélectionnez des bibliothèques efficaces, optimiser les algorithmes, les données de cache et utiliser le multi-threading). Dans l'ensemble, il n'y a pas de réponse absolue et elle doit être optimisée en fonction de la situation spécifique.
 Quel est le processus de conversion de XML en images?
Apr 02, 2025 pm 08:24 PM
Quel est le processus de conversion de XML en images?
Apr 02, 2025 pm 08:24 PM
Pour convertir les images XML, vous devez d'abord déterminer la structure des données XML, puis sélectionner une bibliothèque graphique appropriée (telle que Matplotlib de Python) et la méthode, sélectionner une stratégie de visualisation basée sur la structure de données, considérer le volume de données et le format d'image, effectuer un traitement par lots ou utiliser des bibliothèques efficaces, et enfin les enregistrer sous le nom de PNG, JPEG, ou SVG selon les besoins.
 Comment ouvrir le format XML
Apr 02, 2025 pm 09:00 PM
Comment ouvrir le format XML
Apr 02, 2025 pm 09:00 PM
Utiliser la plupart des éditeurs de texte pour ouvrir des fichiers XML; Si vous avez besoin d'un affichage d'arbre plus intuitif, vous pouvez utiliser un éditeur XML, tel que Oxygen XML Editor ou XMLSPY; Si vous traitez les données XML dans un programme, vous devez utiliser un langage de programmation (tel que Python) et des bibliothèques XML (telles que XML.ETREE.ElementTree) pour analyser.
 Outil de mise en forme XML recommandé
Apr 02, 2025 pm 09:03 PM
Outil de mise en forme XML recommandé
Apr 02, 2025 pm 09:03 PM
Les outils de mise en forme XML peuvent taper le code en fonction des règles pour améliorer la lisibilité et la compréhension. Lors de la sélection d'un outil, faites attention aux capacités de personnalisation, en gérant des circonstances spéciales, des performances et de la facilité d'utilisation. Les types d'outils couramment utilisés incluent des outils en ligne, des plug-ins IDE et des outils de ligne de commande.
 Comment convertir les fichiers XML en PDF sur votre téléphone?
Apr 02, 2025 pm 10:12 PM
Comment convertir les fichiers XML en PDF sur votre téléphone?
Apr 02, 2025 pm 10:12 PM
Il est impossible de terminer la conversion XML à PDF directement sur votre téléphone avec une seule application. Il est nécessaire d'utiliser les services cloud, qui peuvent être réalisés via deux étapes: 1. Convertir XML en PDF dans le cloud, 2. Accédez ou téléchargez le fichier PDF converti sur le téléphone mobile.
 Comment contrôler la taille de XML converti en images?
Apr 02, 2025 pm 07:24 PM
Comment contrôler la taille de XML converti en images?
Apr 02, 2025 pm 07:24 PM
Pour générer des images via XML, vous devez utiliser des bibliothèques de graphiques (telles que Pillow et JFreechart) comme ponts pour générer des images basées sur des métadonnées (taille, couleur) dans XML. La clé pour contrôler la taille de l'image est d'ajuster les valeurs de & lt; largeur & gt; et & lt; height & gt; Tags dans XML. Cependant, dans les applications pratiques, la complexité de la structure XML, la finesse du dessin de graphiques, la vitesse de la génération d'images et la consommation de mémoire et la sélection des formats d'image ont tous un impact sur la taille de l'image générée. Par conséquent, il est nécessaire d'avoir une compréhension approfondie de la structure XML, compétent dans la bibliothèque graphique, et de prendre en compte des facteurs tels que les algorithmes d'optimisation et la sélection du format d'image.
