

La plus petite unité de planification du processeur

L'unité de base de la planification du processeur est le thread. Un thread est la plus petite unité sur laquelle le système d’exploitation peut effectuer la planification des opérations.

Un thread fait référence à un seul flux de contrôle séquentiel dans un processus. Plusieurs threads peuvent s'exécuter simultanément dans un processus, et chaque thread exécute différentes tâches en parallèle. On l'appelle également processus légers sous Unix System V et SunOS, mais les processus légers font davantage référence aux threads du noyau, tandis que les threads utilisateur sont appelés threads. (Apprentissage recommandé : Tutoriel vidéo Web front-end)
Planificateur de processeur
Chaque fois que le processeur est inactif, l'opération doit être sélectionnée parmi la file d'attente prête un processus à exécuter. La sélection des processus est effectuée par un planificateur à court terme ou un planificateur CPU. Le planificateur sélectionne un processus exécutable dans le noyau et lui alloue le CPU.
La file d'attente prête ne doit pas nécessairement être une file d'attente premier entré, premier sorti (FIFO). Les files d'attente prêtes peuvent être implémentées sous forme de files d'attente FIFO, de files d'attente prioritaires, d'arborescences ou de simples listes chaînées non ordonnées. Cependant, sur le plan conceptuel, tous les processus de la file d'attente prête sont mis en file d'attente en attendant d'être exécutés sur le processeur. Les enregistrements dans la file d'attente sont généralement des blocs de contrôle de processus (PCB).
Planification préemptive
Les décisions de planification du processeur peuvent survenir dans les 4 environnements suivants :
Lorsqu'un processus change depuis l'exécution state Passer à un état d'attente (par exemple, une requête d'E/S ou un appel wait pour attendre la fin d'un processus enfant).
Lorsqu'un processus passe de l'état d'exécution à l'état prêt (par exemple, lorsqu'une interruption se produit)
Lorsqu'un processus passe de l'état d'attente à l'état prêt (par exemple, E/S se termine)
Quand un processus se termine
Pour les cas 1 et 4, il n'y a pas d'autre choix que de planifier. Un nouveau processus (si un processus existe déjà dans la file d'attente prête) doit être sélectionné pour exécution. Cependant, pour les cas 2 et 3, il existe un choix.
Lorsque la planification ne peut avoir lieu que dans les 1ère et 4ème situations, le plan de planification est dit non préemptif ou coopératif sinon, le plan de planification est dit préemptif). Avec la planification non préemptive, une fois le processeur alloué à un processus, le processus utilisera toujours le processeur jusqu'à ce qu'il se termine ou passe à un état d'attente.
Les interruptions peuvent survenir à tout moment et ne peuvent pas toujours être ignorées par le noyau, les segments de code affectés par les interruptions doivent donc être protégés de tout accès simultané. Afin d'empêcher l'accès à ces segments de code par plusieurs processus en même temps, les interruptions doivent être désactivées lors de l'entrée et les interruptions doivent être réactivées lors de la sortie.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Les scores d'exécution du processeur AMD Ryzen 9900X, 9700X, 9600X Cinebench R23 sont exposés, avec une augmentation moyenne de 10 à 15 %
Jul 29, 2024 am 11:38 AM
Les scores d'exécution du processeur AMD Ryzen 9900X, 9700X, 9600X Cinebench R23 sont exposés, avec une augmentation moyenne de 10 à 15 %
Jul 29, 2024 am 11:38 AM
Selon les informations de ce site Web du 29 juillet, les processeurs AMD Ryzen de la série 9000 sont désormais disponibles à la réservation sur JD.com. Le premier lot de quatre modèles sera lancé et sortira le 15 août. Les données d'évaluation de ces processeurs seront levées le 14 août, la veille de leur mise en vente. Cependant, certains médias ou institutions ont obtenu des échantillons à l'avance et ont commencé les tests, de sorte que les données de score d'exécution des processeurs R99900X, R79700X et R59600X ont été obtenues. été divulgué. ▲Source de l'image : @9550pro Dans l'ensemble, le passage de Zen4 à Zen5 devrait entraîner une amélioration de 10 à 15 % des performances monocœur et une amélioration de 10 % à 13 % des performances multicœurs, mais le TDP est quelque peu inférieur à celui de la série Ryzen 7000 Réduit, ce qui est également conforme aux données officielles d’amélioration IPC d’AMD. Ryzen
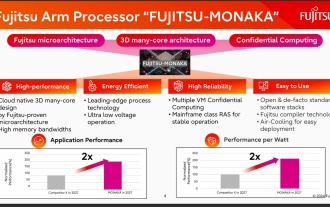 SRAM à 144 cœurs empilée en 3D : Fujitsu détaille le processeur de centre de données de nouvelle génération MONAKA
Jul 29, 2024 am 11:40 AM
SRAM à 144 cœurs empilée en 3D : Fujitsu détaille le processeur de centre de données de nouvelle génération MONAKA
Jul 29, 2024 am 11:40 AM
Selon des informations publiées sur ce site Web le 28 juillet, le média étranger TechRader a rapporté que Fujitsu avait présenté en détail le processeur FUJITSU-MONAKA (ci-après dénommé MONAKA) dont la livraison était prévue pour 2027. MONAKACPU est basé sur l'architecture « cloud native 3D many-core » et adopte le jeu d'instructions Arm. Il est orienté vers les domaines des centres de données, de la périphérie et des télécommunications. Il est adapté à l'informatique IA et peut réaliser un RAS1 au niveau du mainframe. Fujitsu a déclaré que MONAKA réaliserait un bond en avant en termes d'efficacité énergétique et de performances : grâce à des technologies telles que la technologie ultra-basse tension (ULV), le processeur peut atteindre 2 fois l'efficacité énergétique des produits concurrents en 2027, et le refroidissement ne nécessite pas de refroidissement par eau. De plus, les performances applicatives du processeur peuvent également atteindre deux fois celles de votre adversaire. En termes d'instructions, MONAKA est équipé de vecteur
 AMD Ryzen 9 9950X overclocké à 6,6 GHz, CineBench R23 a obtenu un score maximum de 55296 points
Jul 17, 2024 pm 09:49 PM
AMD Ryzen 9 9950X overclocké à 6,6 GHz, CineBench R23 a obtenu un score maximum de 55296 points
Jul 17, 2024 pm 09:49 PM
Selon les informations de ce site Web du 16 juillet, l'équipe AMDXOC a présenté le processeur d'overclocking Ryzen 99950X aux médias invités et aux invités lors de la journée technologique Zen5. Le processeur a été overclocké à l'azote liquide (LN2) et a obtenu plus de 5,5 millions de rands dans CineBench. et la consommation d'énergie atteint 552 W. La plateforme d'overclocking utilisée par l'équipe XOC est la carte mère ASUS X670EROG CorsshairGene, qui est une carte mère spécialement conçue pour overclocker les lecteurs et équipée de 2 DDR5DIMM. Après avoir utilisé de l'azote liquide, la température de fonctionnement du processeur Ryzen 99950X est tombée à moins 90 degrés Celsius, la consommation électrique était de 552 W, le processeur a été overclocké à 6,4 GHz et le score dans CineBenchR23 a dépassé 55296.
 Le multicœur dépasse 100 000, le score d'exécution CPU-Z du processeur AMD EPYC 9755 est exposé : 14 % plus rapide que l'EPYC 9654
Jul 25, 2024 am 10:46 AM
Le multicœur dépasse 100 000, le score d'exécution CPU-Z du processeur AMD EPYC 9755 est exposé : 14 % plus rapide que l'EPYC 9654
Jul 25, 2024 am 10:46 AM
Selon les informations de ce site du 25 juillet, la source HXL (@9550pro) a tweeté hier (24 juillet), partageant des informations sur le processeur AMDEPYC9755 "Turin" basé sur Zen5, qui a obtenu d'excellents résultats au test de référence CPU-Z. . Informations sur le processeur AMDEPYC9755 « Turin » L'EPYC9755 est le produit de la famille EPYC de cinquième génération d'AMD, équipé de 128 cœurs et 256 threads sur l'architecture Zen5. La fréquence d'horloge de base du processeur EPYC9755 est de 2,70 GHz et la fréquence d'horloge d'accélération peut atteindre 4,10 GHz. Par rapport à la génération précédente, le nombre de cœurs/threads a augmenté de 33 % et la fréquence d'horloge a augmenté de 11 %. EPYC9755
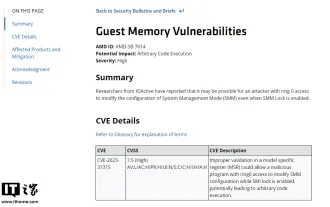 AMD annonce une vulnérabilité de haute gravité « Sinkclose », affectant des millions de processeurs Ryzen et EPYC
Aug 10, 2024 pm 10:31 PM
AMD annonce une vulnérabilité de haute gravité « Sinkclose », affectant des millions de processeurs Ryzen et EPYC
Aug 10, 2024 pm 10:31 PM
Selon les informations de ce site du 10 août, AMD a officiellement confirmé que certains processeurs EPYC et Ryzen présentent une nouvelle vulnérabilité appelée "Sinkclose" avec le code "CVE-2023-31315", qui pourrait impliquer des millions d'utilisateurs AMD dans le monde. Alors, qu’est-ce que Sinkclose ? Selon un rapport de WIRED, la vulnérabilité permet aux intrus d'exécuter du code malveillant en « Mode de gestion système (SMM) ». Apparemment, les intrus peuvent utiliser un type de malware appelé bootkit pour prendre le contrôle du système de l'autre partie, et ce malware ne peut pas être détecté par un logiciel antivirus. Remarque tirée de ce site : Le mode de gestion du système (SMM) est un mode de fonctionnement spécial du processeur conçu pour réaliser des fonctions avancées de gestion de l'alimentation et indépendantes du système d'exploitation.
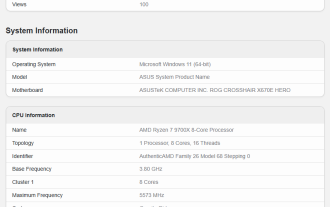 Le processeur AMD Ryzen 7 9700X apparaît sur Geekbench : le score d'exécution monocœur est 14 % supérieur à celui du R7 7700X
Jul 12, 2024 pm 01:59 PM
Le processeur AMD Ryzen 7 9700X apparaît sur Geekbench : le score d'exécution monocœur est 14 % supérieur à celui du R7 7700X
Jul 12, 2024 pm 01:59 PM
Selon les informations de ce site du 9 juillet, une machine de test ASUS équipée d'un processeur AMD Ryzen 79700X est apparue dans la base de données Geekbench, équipée d'une carte mère ROG CROSSHAIRX670EHERO et de 32 Go de mémoire DDR56000. AMD Ryzen 79700X a 8 cœurs et 16 threads, une fréquence de base de 3,8 GHz, une fréquence d'accélération de 5,5 GHz, 40 Mo de cache (note de ce site : 32MBL3+8MBL2) et une conception TDP de 65 W, mais il y a aussi des nouvelles selon lesquelles AMD a augmenté son TDP à 120 W. . Comme le montre la figure, la plate-forme de test a obtenu des scores monocœurs et multicœurs de 3 312 points et 16 431 points sur Geekbench6.3.0, ce qui est meilleur que le R77700.
 2*A78+6*A55, MediaTek lance le processeur Chromebook milieu à haut de gamme Kompanio 838
Jun 04, 2024 pm 03:34 PM
2*A78+6*A55, MediaTek lance le processeur Chromebook milieu à haut de gamme Kompanio 838
Jun 04, 2024 pm 03:34 PM
Selon les informations de ce site du 31 mai, MediaTek a lancé aujourd'hui le processeur Kompanio 838. MediaTek a déclaré que ce SoC de processus 6 nm est destiné au marché des Chromebooks milieu à haut de gamme. Par rapport aux produits de la série Kompanio500, les performances graphiques sont améliorées jusqu'à 76 %, le test de référence du processeur est amélioré jusqu'à 66 %. , et le test de référence Web est amélioré jusqu'à 60 %. Ce site organise les paramètres du processeur Kompanio838 comme suit : CPU : conception à 8 cœurs, 2*ArmCortex-A78 à 2,6 GHz + 6* ArmCortex-A55 à 2,0 GHz ; GPU : ArmMali-G57MC3 Processeur AI : NPU650, puissance de calcul ; 4HAUTS
 Processeur Intel Core Ultra 9 285K exposé : le score d'exécution monocœur est 4 % plus rapide que le Ryzen 9 9950X et le multicœur est 14 % plus rapide
Aug 21, 2024 pm 04:46 PM
Processeur Intel Core Ultra 9 285K exposé : le score d'exécution monocœur est 4 % plus rapide que le Ryzen 9 9950X et le multicœur est 14 % plus rapide
Aug 21, 2024 pm 04:46 PM
Selon les informations de ce site Web du 21 août, le média technologique WccFtech a rapporté aujourd'hui que le processeur Intel Core Ultra9285K "ArrowLake" est apparu dans la bibliothèque de référence GeekBench6, surpassant les processeurs Core i9-14900KS et Ryzen99950X. Plate-forme de test La plate-forme de test exposée cette fois est la carte mère ASUS ROGSTRIXZ890-AGamingWIFI et 64 Go de mémoire DDR5-6400. Introduction au processeur de bureau Intel Core Ultra9285K "ArrowLake-S" La consommation électrique PL1 du processeur Intel Core Ultra9285K est de 125 W et il utilise un processus de 7 nm (informations CPU-Z, il devrait en fait utiliser le Royaume-Uni).