
 Opération et maintenance
exploitation et maintenance Linux
Que signifie le numéro d'interruption Linux ?
Opération et maintenance
exploitation et maintenance Linux
Que signifie le numéro d'interruption Linux ?
Que signifie le numéro d'interruption Linux ?

Le numéro d'interruption Linux est le code attribué par le système à chaque source d'interruption pour l'identification et le traitement ; dans le système d'interruption utilisant le mode d'interruption vectorielle, le CPU doit l'utiliser pour trouver l'adresse d'entrée du programme de service d'interruption et réaliser le transfert de programme.
L'environnement d'exploitation de ce tutoriel : système linux5.9.8, ordinateur Dell G3.
linux Que signifie le numéro d'interruption ?
Numéro d'interruption et programmation d'interruption :
1. Numéro d'interruption
Le numéro d'interruption est le nom de code attribué par le système à chaque source d'interruption pour une identification et un traitement faciles. Dans un système d'interruption qui utilise des interruptions vectorielles, la CPU doit l'utiliser pour trouver l'adresse d'entrée du programme de service d'interruption et réaliser le transfert de programme.
Pour implémenter des interruptions dans ARM bare metal, vous devez configurer :
I/O口为中断模式,触发方式,I/O口中断使能 设置GIC中断使能,分发配置,分发总使能,CPU外部中断接口使能,中断优先级
Pour implémenter des interruptions dans le noyau Linux, il vous suffit de savoir :
中断号是什么,怎么得到中断号 中断处理方法
2. :
/arm/boot/dts/exynos4412-fs4412.dts
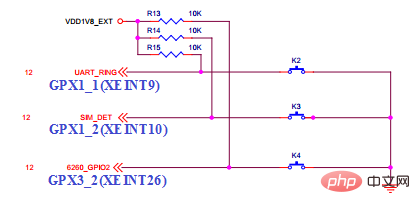
1) Regardez le schéma de principe et le manuel de la puce pour trouver le numéro d'interruption du port SPI correspondant à la source d'interruption No

2) Entrez dans l'arborescence des appareils, en arch/arm/boot/dts/exynos4x12-pinctrl.dtsi
gpx1: gpx1 {
gpio-controller;
#gpio-cells = <2>;
interrupt-controller; //中断控制器
interrupt-parent = <&gic>; //继承于gic
interrupts = <0 24 0>, <0 25 0>, <0 26 0>, <0 27 0>,
<0 28 0>, <0 29 0>, <0 30 0>, <0 31 0>;
#interrupt-cells = <2>; //子继承的interrupts的长度
};24, 25, etc. entre parenthèses correspondent au numéro de port SPI, ce qui précède sont les nœuds qui ont été définis dans le système
En programmation, vous devez définir vos propres nœuds pour décrire les boutons et ouvrir le fichier modifiable fichier de l'arborescence des périphériques :
arch/arm/boot/dts/exynos4412-fs4412, entrez le fichier.
3) Définissez le nœud et décrivez le numéro d'interruption utilisé par l'appareil actuel
1 key_int_node{
2 compatible = "test_key";
3 interrupt-parent = <&gpx1>; //继承于gpx1
4 interrupts = <2 4>; //2表示第几个中断号,4表示触发方式为下降沿5 }; //interrupts里长度由父母的-cell决定 Un autre exemple, définissez le nœud de k4 --- GPX3_2 (XEINT26), le numéro d'interruption
1 key_int_node{
2 compatible = "test_key";
3 interrupt-parent = <&gpx3>; //继承于gpx3
4 interrupts = <2 4>; //2表示第2个中断号,4表示触发方式为下降沿
5 };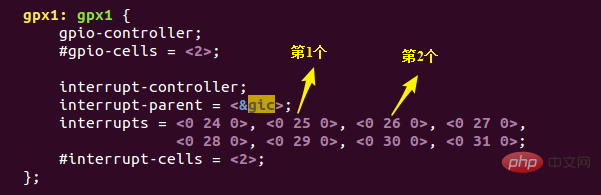
Comment localisez le numéro d'interruption :
Regardez la broche d'E/S, GPX1_2, le numéro d'interruption est le deuxième dans GPX1
4) Compilez l'arborescence des périphériques : make dtbs
Mettez à jour le fichier de l'arborescence des périphériques : cp -raf arch/ arm/boot/dts/exynos4412- fs4412.dtb /tftpboot/
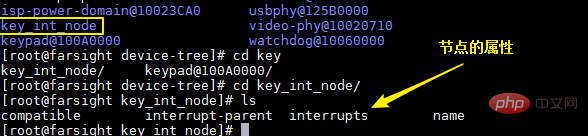
Affichez les nœuds définis : dans le répertoire proc/device-tree/ du répertoire racine
3 Implémentez la méthode de gestion des interruptions.
Obtenez-le via le code dans le pilote correspondant au numéro d'interruption et demandez une interruption
Jetons d'abord un coup d'œil aux fonctions liées à l'interruption :
1 a,获取到中断号码:
2 int get_irqno_from_node(void)
3 {
4 // 获取到设备树中的节点
5 struct device_node *np = of_find_node_by_path("/key_int_node");
6 if(np){
7 printk("find node ok\n");
8 }else{
9 printk("find node failed\n");
10 }
11
12 // 通过节点去获取到中断号码
13 int irqno = irq_of_parse_and_map(np, 0);
14 printk("irqno = %d\n", irqno);
15
16 return irqno;
17 }
18 b,申请中断
19 int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags, const char * name, void * dev)
20 参数1: irq 设备对应的中断号
21 参数2: handler 中断的处理函数
22 typedef irqreturn_t (*irq_handler_t)(int, void *);
23 参数3:flags 触发方式
24 #define IRQF_TRIGGER_NONE 0x00000000 //内部控制器触发中断的时候的标志
25 #define IRQF_TRIGGER_RISING 0x00000001 //上升沿
26 #define IRQF_TRIGGER_FALLING 0x00000002 //下降沿
27 #define IRQF_TRIGGER_HIGH 0x00000004 // 高点平
28 #define IRQF_TRIGGER_LOW 0x00000008 //低电平触发
29 参数4:name 中断的描述,自定义,主要是给用户查看的
30 /proc/interrupts
31 参数5:dev 传递给参数2中函数指针的值
32 返回值: 正确为0,错误非0
33
34
35 参数2的赋值:即中断处理函数
36 irqreturn_t key_irq_handler(int irqno, void *devid)
37 {
38 return IRQ_HANDLED;
39 }
43
44 c, 释放中断:
45 void free_irq(unsigned int irq, void *dev_id)
46 参数1: 设备对应的中断号
47 参数2:与request_irq中第5个参数保持一致Le code implémente l'obtention du numéro d'interruption, l'enregistrement de l'interruption, appuyer sur le bouton pour provoquer l'interruption et imprimer les informations
1 #include <linux/init.h>
2 #include <linux/module.h>
3 #include <linux/fs.h>
4 #include <linux/device.h>
5 #include <asm/uaccess.h>
6 #include <asm/io.h>
7 #include <linux/slab.h>
8 #include <linux/of.h>
9 #include <linux/of_irq.h>
10 #include <linux/interrupt.h>
11
12 int irqno; //中断号
13
14
15 irqreturn_t key_irq_handler(int irqno, void *devid)
16 {
17 printk("----------%s---------",__FUNCTION__);
18 return IRQ_HANDLED;
19 }
20
21
22 //获取中断号
23 int get_irqno_from_node(void)
24 {
25 //获取设备树中的节点
26 struct device_node *np = of_find_node_by_path("/key_int_node");
27 if(np){
28 printk("find node success\n");
29 }else{
30 printk("find node failed\n");
31 }
32
33 //通过节点去获取中断号
34 int irqno = irq_of_parse_and_map(np, 0);
35 printk("iqrno = %d",irqno);
36
37 return irqno;
38 }
39
40
41
42 static int __init key_drv_init(void)
43 {
44 //演示如何获取到中断号
45 int ret;
46
47 irqno = get_irqno_from_node();
48
49 ret = request_irq(irqno, key_irq_handler, IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING,
50 "key3_eint10", NULL);
51 if(ret != 0)
52 {
53 printk("request_irq error\n");
54 return ret;
55 }
56
57 return 0;
58 }
59
60 static void __exit key_drv_exit(void)
61 {
62 free_irq(irqno, NULL); //free_irq与request_irq的最后一个参数一致
63 }
64
65
66
67 module_init(key_drv_init);
68 module_exit(key_drv_exit);
69
70 MODULE_LICENSE("GPL");
key_drv.cEffet de test : Appuyez sur la touche pour imprimer les informations, mais les touches tremblent
cat /ProC /Interrupt
// 1,设定一个全局的设备对象
key_dev = kzalloc(sizeof(struct key_desc), GFP_KERNEL);
// 2,申请主设备号
key_dev->dev_major = register_chrdev(0, "key_drv", &key_fops);
// 3,创建设备节点文件
key_dev->cls = class_create(THIS_MODULE, "key_cls");
key_dev->dev = device_create(key_dev->cls, NULL, MKDEV(key_dev->dev_major,0), NULL, "key0");
// 4,硬件初始化:
a.地址映射
b.中断申请 5 . Le pilote implémente la transmission des données générées par le matériel à l'utilisateur
5 . Le pilote implémente la transmission des données générées par le matériel à l'utilisateur
key: 按下和抬起: 1/0读取key对应的gpio的状态,可以判断按下还是抬起
读取key对应gpio的寄存器--数据寄存器
//读取数据寄存器int value = readl(key_dev->reg_base + 4) & (1<<2);在中断处理中填充数据:
key_dev->event.code = KEY_ENTER;
key_dev->event.value = 0;
在xxx_read中奖数据传递给用户
ret = copy_to_user(buf, &key_dev->event, count); while(1)
{
read(fd, &event, sizeof(struct key_event)); if(event.code == KEY_ENTER)
{ if(event.value)
{
printf("APP__ key enter pressed\n");
}else{
printf("APP__ key enter up\n");
}
}
}
6. Exemple :
1 #include <linux/init.h>
2 #include <linux/module.h>
3 #include <linux/of.h>
4 #include <linux/of_irq.h>
5 #include <linux/interrupt.h>
6 #include <linux/slab.h>
7 #include <linux/fs.h>
8 #include <linux/device.h>
9 #include <linux/kdev_t.h>
10 #include <linux/err.h>
11 #include <linux/device.h>
12 #include <asm/io.h>
13 #include <asm/uaccess.h>
14
15
16 #define GPXCON_REG 0X11000C20 //不可以从数据寄存器开始映射,要配置寄存器
17 #define KEY_ENTER 28
18
19 //0、设计一个描述按键的数据的对象
20 struct key_event{
21 int code; //按键类型:home,esc,enter
22 int value; //表状态,按下,松开
23 };
24
25 //1、设计一个全局对象——— 描述key的信息
26 struct key_desc{
27 unsigned int dev_major;
28 int irqno; //中断号
29 struct class *cls;
30 struct device *dev;
31 void *reg_base;
32 struct key_event event;
33 };
34
35 struct key_desc *key_dev;
36
37
38 irqreturn_t key_irq_handler(int irqno, void *devid)
39 {
40 printk("----------%s---------",__FUNCTION__);
41
42 int value;
43 //读取按键状态
44 value = readl(key_dev->reg_base + 4) & (0x01<<2);
45
46 if(value){
47 printk("key3 up\n");
48 key_dev->event.code = KEY_ENTER;
49 key_dev->event.value = 0;
50 }else{
51 printk("key3 down\n");
52 key_dev->event.code = KEY_ENTER;
53 key_dev->event.value = 1;
54 }
55 return IRQ_HANDLED;
56 }
57
58
59 //获取中断号
60 int get_irqno_from_node(void)
61 {
62 int irqno;
63 //获取设备树中的节点
64 struct device_node *np = of_find_node_by_path("/key_int_node");
65 if(np){
66 printk("find node success\n");
67 }else{
68 printk("find node failed\n");
69 }
70
71 //通过节点去获取中断号
72 irqno = irq_of_parse_and_map(np, 0);
73 printk("iqrno = %d",key_dev->irqno);
74
75 return irqno;
76 }
77
78 ssize_t key_drv_read (struct file * filp, char __user * buf, size_t count, loff_t * fops)
79 {
80 //printk("----------%s---------",__FUNCTION__);
81 int ret;
82 ret = copy_to_user(buf, &key_dev->event, count);
83 if(ret > 0)
84 {
85 printk("copy_to_user error\n");
86 return -EFAULT;
87 }
88
89 //传递给用户数据后,将数据清除,否则APP每次读都是第一次的数据
90 memset(&key_dev->event, 0, sizeof(key_dev->event));
91 return count;
92 }
93
94 ssize_t key_drv_write (struct file *filp, const char __user * buf, size_t count, loff_t * fops)
95 {
96 printk("----------%s---------",__FUNCTION__);
97 return 0;
98 }
99
100 int key_drv_open (struct inode * inode, struct file *filp)
101 {
102 printk("----------%s---------",__FUNCTION__);
103 return 0;
104 }
105
106 int key_drv_close (struct inode *inode, struct file *filp)
107 {
108 printk("----------%s---------",__FUNCTION__);
109 return 0;
110 }
111
112
113 const struct file_operations key_fops = {
114 .open = key_drv_open,
115 .read = key_drv_read,
116 .write = key_drv_write,
117 .release = key_drv_close,
118
119 };
120
121
122
123 static int __init key_drv_init(void)
124 {
125 //演示如何获取到中断号
126 int ret;
127
128 //1、设定全局设备对象并分配空间
129 key_dev = kzalloc(sizeof(struct key_desc), GFP_KERNEL); //GFP_KERNEL表正常分配内存
130 //kzalloc相比于kmalloc,不仅分配连续空间,还会将内存初始化清零
131
132 //2、动态申请设备号
133 key_dev->dev_major = register_chrdev(0, "key_drv", &key_fops);
134
135 //3、创建设备节点文件
136 key_dev->cls = class_create(THIS_MODULE, "key_cls");
137 key_dev->dev = device_create(key_dev->cls, NULL, MKDEV(key_dev->dev_major, 0), NULL, "key0");
138
139 //4、硬件初始化 -- 地址映射或中断申请
140
141 key_dev->reg_base = ioremap(GPXCON_REG,8);
142
143 key_dev->irqno = get_irqno_from_node();
144
145 ret = request_irq(key_dev->irqno, key_irq_handler, IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING,
146 "key3_eint10", NULL);
147 if(ret != 0)
148 {
149 printk("request_irq error\n");
150 return ret;
151 }
152
153 //a. 硬件如何获取数据
154
155
156
157 return 0;
158 }
159
160 static void __exit key_drv_exit(void)
161 {
162 iounmap(GPXCON_REG);
163 free_irq(key_dev->irqno, NULL); //free_irq与request_irq的最后一个参数一致
164 device_destroy(key_dev->cls, MKDEV(key_dev->dev_major, 0));
165 class_destroy(key_dev->cls);
166 unregister_chrdev(key_dev->dev_major, "key_drv");
167 kfree(key_dev);
168 }
169
170
171
172 module_init(key_drv_init);
173 module_exit(key_drv_exit);
174
175 MODULE_LICENSE("GPL");
key_drv.ckey_drv.c
1 #include <stdio.h>
2 #include <string.h>
3 #include <stdlib.h>
4 #include <unistd.h>
5 #include <sys/types.h>
6 #include <sys/stat.h>
7 #include <fcntl.h>
8
9
10 #define KEY_ENTER 28
11
12 //0、设计一个描述按键的数据的对象
13 struct key_event{
14 int code; //按键类型:home,esc,enter
15 int value; //表状态,按下,松开
16 };
17
18
19 int main(int argc, char *argv[])
20 {
21 struct key_event event;
22 int fd;
23 fd = open("/dev/key0", O_RDWR);
24 if(fd < 0)
25 {
26 perror("open");
27 exit(1);
28 }
29
30 while(1)
31 {
32 read(fd, &event, sizeof(struct key_event));
33
34 if(event.code == KEY_ENTER)
35 {
36 if(event.value)
37 {
38 printf("APP__ key enter down\n");
39 }else{
40
41 printf("APP__ key enter up\n");
42 }
43 }
44 }
45
46 close(fd);
47
48 return 0;
49 }
key_test.c1 ROOTFS_DIR = /home/linux/source/rootfs#根文件系统路径 2 3 APP_NAME = key_test 4 MODULE_NAME = key_drv 5 6 CROSS_COMPILE = /home/linux/toolchains/gcc-4.6.4/bin/arm-none-linux-gnueabi- 7 CC = $(CROSS_COMPILE)gcc 8 9 ifeq ($(KERNELRELEASE),) 10 11 KERNEL_DIR = /home/linux/kernel/linux-3.14-fs4412 #编译过的内核源码的路径 12 CUR_DIR = $(shell pwd) #当前路径 13 14 all: 15 make -C $(KERNEL_DIR) M=$(CUR_DIR) modules #把当前路径编成modules 16 $(CC) $(APP_NAME).c -o $(APP_NAME) 17 @#make -C 进入到内核路径 18 @#M 指定当前路径(模块位置) 19 20 clean: 21 make -C $(KERNEL_DIR) M=$(CUR_DIR) clean 22 23 install: 24 sudo cp -raf *.ko $(APP_NAME) $(ROOTFS_DIR)/drv_module #把当前的所有.ko文件考到根文件系统的drv_module目录 25 26 else 27 28 obj-m += $(MODULE_NAME).o #指定内核要把哪个文件编译成ko 29 30 endif Makefile
Exécutez le programme utilisateur et appuyez sur le bouton pour voir les informations
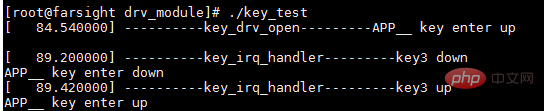
Quittez le programme utilisateur et appuyez sur le bouton et les informations correspondantes seront imprimées.
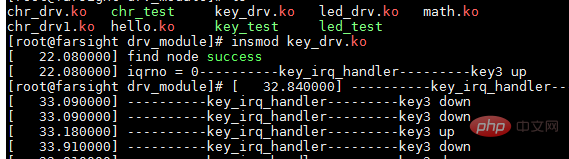
Afficher les informations sur le périphérique et le nœud d'interruption :


Regardez la situation du processeur :

Vous pouvez voir que l'application key_test occupe une grande quantité de CPU. raison?
Dans l'application, les informations du noyau sont toujours lues via la boucle while. Lorsqu'une interruption de clé se produit, key_event se verra attribuer une valeur, jugée dans la boucle while, puis imprimée, de sorte que l'espace utilisateur et l'espace du noyau sont toujours des allers-retours et lire tout le temps consommera beaucoup de ressources CPU.
Solution : lorsqu'une interruption se produit, read est appelé. Si aucune donnée n'est générée, la planification du processus est sautée et le processus se met en veille.
Apprentissage recommandé : "Tutoriel vidéo Linux"
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Différence entre Centos et Ubuntu
Apr 14, 2025 pm 09:09 PM
Différence entre Centos et Ubuntu
Apr 14, 2025 pm 09:09 PM
Les principales différences entre Centos et Ubuntu sont: l'origine (Centos provient de Red Hat, pour les entreprises; Ubuntu provient de Debian, pour les particuliers), la gestion des packages (Centos utilise Yum, se concentrant sur la stabilité; Ubuntu utilise APT, pour une fréquence de mise à jour élevée), le cycle de support (CentOS fournit 10 ans de soutien, Ubuntu fournit un large soutien de LT tutoriels et documents), utilisations (Centos est biaisé vers les serveurs, Ubuntu convient aux serveurs et aux ordinateurs de bureau), d'autres différences incluent la simplicité de l'installation (Centos est mince)
 Comment installer CentOS
Apr 14, 2025 pm 09:03 PM
Comment installer CentOS
Apr 14, 2025 pm 09:03 PM
Étapes d'installation de CentOS: Téléchargez l'image ISO et Burn Bootable Media; démarrer et sélectionner la source d'installation; sélectionnez la langue et la disposition du clavier; configurer le réseau; partitionner le disque dur; définir l'horloge système; créer l'utilisateur racine; sélectionnez le progiciel; démarrer l'installation; Redémarrez et démarrez à partir du disque dur une fois l'installation terminée.
 Le choix de Centos après l'arrêt de l'entretien
Apr 14, 2025 pm 08:51 PM
Le choix de Centos après l'arrêt de l'entretien
Apr 14, 2025 pm 08:51 PM
CentOS a été interrompu, les alternatives comprennent: 1. Rocky Linux (meilleure compatibilité); 2. Almalinux (compatible avec CentOS); 3. Serveur Ubuntu (configuration requise); 4. Red Hat Enterprise Linux (version commerciale, licence payante); 5. Oracle Linux (compatible avec Centos et Rhel). Lors de la migration, les considérations sont: la compatibilité, la disponibilité, le soutien, le coût et le soutien communautaire.
 Comment utiliser Docker Desktop
Apr 15, 2025 am 11:45 AM
Comment utiliser Docker Desktop
Apr 15, 2025 am 11:45 AM
Comment utiliser Docker Desktop? Docker Desktop est un outil pour exécuter des conteneurs Docker sur les machines locales. Les étapes à utiliser incluent: 1. Installer Docker Desktop; 2. Démarrer Docker Desktop; 3. Créer une image Docker (à l'aide de DockerFile); 4. Build Docker Image (en utilisant Docker Build); 5. Exécuter Docker Container (à l'aide de Docker Run).
 Explication détaillée du principe docker
Apr 14, 2025 pm 11:57 PM
Explication détaillée du principe docker
Apr 14, 2025 pm 11:57 PM
Docker utilise les fonctionnalités du noyau Linux pour fournir un environnement de fonctionnement d'application efficace et isolé. Son principe de travail est le suivant: 1. Le miroir est utilisé comme modèle en lecture seule, qui contient tout ce dont vous avez besoin pour exécuter l'application; 2. Le Système de fichiers Union (UnionFS) empile plusieurs systèmes de fichiers, ne stockant que les différences, l'économie d'espace et l'accélération; 3. Le démon gère les miroirs et les conteneurs, et le client les utilise pour l'interaction; 4. Les espaces de noms et les CGROUP implémentent l'isolement des conteneurs et les limitations de ressources; 5. Modes de réseau multiples prennent en charge l'interconnexion du conteneur. Ce n'est qu'en comprenant ces concepts principaux que vous pouvez mieux utiliser Docker.
 Que faire si l'image Docker échoue
Apr 15, 2025 am 11:21 AM
Que faire si l'image Docker échoue
Apr 15, 2025 am 11:21 AM
Dépannage des étapes pour la construction d'image Docker échouée: cochez la syntaxe Dockerfile et la version de dépendance. Vérifiez si le contexte de construction contient le code source et les dépendances requis. Affichez le journal de construction pour les détails d'erreur. Utilisez l'option - cibler pour créer une phase hiérarchique pour identifier les points de défaillance. Assurez-vous d'utiliser la dernière version de Docker Engine. Créez l'image avec --t [Image-Name]: Debug Mode pour déboguer le problème. Vérifiez l'espace disque et assurez-vous qu'il est suffisant. Désactivez SELINUX pour éviter les interférences avec le processus de construction. Demandez de l'aide aux plateformes communautaires, fournissez Dockerfiles et créez des descriptions de journaux pour des suggestions plus spécifiques.
 Que faire après Centos arrête la maintenance
Apr 14, 2025 pm 08:48 PM
Que faire après Centos arrête la maintenance
Apr 14, 2025 pm 08:48 PM
Une fois CentOS arrêté, les utilisateurs peuvent prendre les mesures suivantes pour y faire face: sélectionnez une distribution compatible: comme Almalinux, Rocky Linux et CentOS Stream. Migrez vers les distributions commerciales: telles que Red Hat Enterprise Linux, Oracle Linux. Passez à Centos 9 Stream: Rolling Distribution, fournissant les dernières technologies. Sélectionnez d'autres distributions Linux: comme Ubuntu, Debian. Évaluez d'autres options telles que les conteneurs, les machines virtuelles ou les plates-formes cloud.
 Quelle configuration de l'ordinateur est requise pour VScode
Apr 15, 2025 pm 09:48 PM
Quelle configuration de l'ordinateur est requise pour VScode
Apr 15, 2025 pm 09:48 PM
Vs Code Système Exigences: Système d'exploitation: Windows 10 et supérieur, MacOS 10.12 et supérieur, processeur de distribution Linux: minimum 1,6 GHz, recommandé 2,0 GHz et au-dessus de la mémoire: minimum 512 Mo, recommandée 4 Go et plus d'espace de stockage: Minimum 250 Mo, recommandée 1 Go et plus d'autres exigences: connexion du réseau stable, xorg / wayland (Linux) recommandé et recommandée et plus
