
 Périphériques technologiques
IA
Apprentissage physique profond avec des méthodes de formation inspirées par la biologie : une approche sans gradient du matériel physique
Périphériques technologiques
IA
Apprentissage physique profond avec des méthodes de formation inspirées par la biologie : une approche sans gradient du matériel physique
Apprentissage physique profond avec des méthodes de formation inspirées par la biologie : une approche sans gradient du matériel physique

La demande croissante d’intelligence artificielle a stimulé la recherche sur l’informatique non conventionnelle basée sur des appareils physiques. Même si ces dispositifs informatiques imitent le traitement analogique de l’information inspiré par le cerveau, le processus d’apprentissage repose toujours sur des méthodes optimisées pour le traitement numérique, telles que la rétropropagation, qui ne sont pas adaptées à une mise en œuvre physique.
Ici, une équipe de chercheurs des laboratoires japonais NTT Device Technology Labs et de l'Université de Tokyo démontrent la physique en étendant un algorithme d'entraînement d'inspiration biologique appelé apprentissage profond Direct Feedback Alignment (DFA). Contrairement à l'algorithme original, la méthode proposée est basée sur des projections aléatoires avec des activations non linéaires alternatives. Par conséquent, les réseaux de neurones physiques peuvent être entraînés sans connaissance du système physique et de ses gradients. De plus, le calcul de cette formation peut être simulé sur du matériel physique évolutif.
Les chercheurs ont démontré une preuve de concept à l'aide d'un réseau neuronal optoélectronique récurrent appelé ordinateur à réservoir profond. Le potentiel d’un calcul accéléré avec des performances compétitives sur les benchmarks est démontré. Les résultats fournissent des solutions pratiques pour la formation et l’accélération du calcul neuromorphique.
La recherche s'intitulait « Apprentissage profond physique avec méthode d'entraînement inspirée biologiquement : approche sans gradient pour le matériel physique » et a été publiée dans « Nature Communications » le 26 décembre 2022.
Physical Deep Learning
Les performances record de l'apprentissage automatique basé sur les réseaux de neurones artificiels (ANN) dans le traitement d'images, la reconnaissance vocale, les jeux, etc. ont démontré avec succès ses capacités exceptionnelles. Bien que ces algorithmes ressemblent au fonctionnement du cerveau humain, ils sont essentiellement mis en œuvre au niveau logiciel à l’aide du matériel informatique traditionnel de von Neumann. Cependant, ces réseaux de neurones artificiels basés sur l’informatique numérique sont confrontés à des problèmes de consommation d’énergie et de vitesse de traitement. Ces problématiques motivent l’utilisation de plateformes physiques alternatives pour la mise en œuvre de réseaux de neurones artificiels.
Fait intéressant, même la dynamique physique passive peut être utilisée comme ressources de calcul dans les ANN connectés de manière aléatoire. Connu sous le nom d'ordinateur à réservoir physique (RC) ou de machine d'apprentissage extrême (ELM), la facilité de mise en œuvre de ce cadre élargit considérablement le choix de matériaux réalisables et leur gamme d'applications. De tels réseaux neuronaux (PNN) physiquement implémentés sont capables d'externaliser la charge de calcul spécifique à une tâche vers des systèmes physiques.
La construction de réseaux physiques plus profonds est une direction prometteuse pour améliorer encore les performances, car ils peuvent étendre de manière exponentielle les capacités d'expression du réseau. Cela motive les propositions de PNN profonds utilisant diverses plates-formes physiques. Leur formation repose essentiellement sur une méthode appelée rétropropagation (BP), qui a connu un grand succès dans les ANN logiciels. Cependant, BP ne convient pas au PNN dans les aspects suivants. Premièrement, la mise en œuvre physique des opérations BP reste complexe et non évolutive. Deuxièmement, BP nécessite une compréhension précise de l’ensemble du système physique. De plus, lorsque nous appliquons BP au RC, ces exigences compromettent les propriétés uniques du RC physique, à savoir que nous devons comprendre et simuler avec précision les réseaux stochastiques physiques en boîte noire.
Comme la BP dans le PNN, la difficulté de faire fonctionner la BP dans les réseaux neuronaux biologiques a également été soulignée par la communauté des sciences du cerveau ; la rationalité de la BP dans le cerveau a toujours été remise en question. Ces considérations ont conduit au développement d’algorithmes d’entraînement biologiquement valables.
Une direction prometteuse dans un avenir proche est l'alignement par rétroaction directe (DFA). Dans cet algorithme, une transformation linéaire aléatoire fixe du signal d'erreur final de la couche de sortie est utilisée pour remplacer le signal d'erreur inverse. Par conséquent, cette méthode ne nécessite pas de propagation couche par couche des signaux d’erreur ni de connaissance des poids. De plus, DFA serait évolutif aux grands modèles de réseaux modernes. Le succès de cette formation biologiquement motivée suggère qu’il existe un moyen plus approprié de former les PNN que les BP. Cependant, DFA nécessite toujours la dérivée f'(a) de la fonction non linéaire f(x) pour l'entraînement, ce qui entrave l'application de la méthode DFA dans les systèmes physiques. Par conséquent, une plus grande échelle de DFA est importante pour les applications PNN.
DFA et son amélioration de l'apprentissage profond en physique
Ici, les chercheurs démontrent l'apprentissage profond en physique en améliorant l'algorithme DFA. Dans le DFA amélioré, nous remplaçons la dérivée de l'activation physique non linéaire f'(a) dans le DFA standard par un g(a) non linéaire arbitraire et montrons que les performances sont robustes au choix de g(a). Grâce à cette amélioration, il n'est plus nécessaire de modéliser f'(a) avec précision. Puisque la méthode proposée est basée sur des projections stochastiques parallèles avec des activations non linéaires arbitraires, les calculs d'entraînement peuvent être effectués sur des systèmes physiques de la même manière que les concepts physiques ELM ou RC. Cela permet une accélération physique de l’inférence et de la formation.

Figure : Concept du PNN et sa formation à travers BP et DFA augmenté. (Source : article)
Pour démontrer la preuve de concept, les chercheurs ont construit un RC optoélectronique de physique profonde assisté par FPGA comme établi. Bien que le benchtop soit simple à utiliser et puisse être appliqué à une variété de plates-formes physiques avec uniquement des mises à jour au niveau logiciel, il atteint des performances comparables à celles des systèmes de pointe de grande taille et complexes.

Figure : Système RC en profondeur optoélectronique avec formation DFA améliorée. (Source : papier)
De plus, l'ensemble du temps de traitement, y compris le temps de traitement numérique, a été comparé, et la possibilité d'une accélération physique du processus de formation a été trouvée.

Figure : Performances du système RC profond optoélectronique. (Source : Paper)
Le budget temps de traitement du banc RC se décompose comme suit : Traitement FPGA (transfert de données, allocation mémoire et DAC/ADC) ~92% traitement numérique pour le prétraitement/Post- ; traitement. Par conséquent, au stade actuel, le temps de traitement est dominé par les calculs numériques sur les FPGA et les CPU. En effet, le banc optoélectronique implémente un réservoir utilisant une seule ligne à retard non linéaire. Ces limitations pourraient être assouplies en utilisant du matériel informatique entièrement parallèle et entièrement optique à l'avenir. Comme on peut le voir, le calcul sur CPU et GPU montre une tendance de O(N^2) pour le nombre de nœuds, tandis que le calcul sur table affiche O(N), ce qui est dû au goulot d'étranglement du transfert de données.
L'accélération physique en dehors du CPU est observée à N ~ 5 000 et ~ 12 000 pour les algorithmes BP et DFA améliorés, respectivement. Cependant, en termes de vitesse de calcul, l’efficacité contre les GPU n’a pas été directement observée en raison de leurs limitations de mémoire. En extrapolant la tendance du GPU, une accélération physique sur le GPU peut être observée à N ~ 80 000. À notre connaissance, il s’agit de la première comparaison de l’ensemble du processus d’entraînement et de la première démonstration d’accélération de l’entraînement physique à l’aide de PNN.
Pour étudier l'applicabilité de la méthode proposée à d'autres systèmes, des simulations numériques ont été réalisées à l'aide du réseau neuronal photonique largement étudié. De plus, la RC basée sur le retard démontrée expérimentalement s'avère bien adaptée à divers systèmes physiques. Concernant l’évolutivité des systèmes physiques, le principal problème dans la construction de réseaux profonds est leur bruit inhérent. Les effets du bruit sont étudiés au moyen de simulations numériques. Le système s’est avéré robuste au bruit.
Évolutivité et limites de l'approche proposée
Ici, l'évolutivité de l'approche basée sur DFA vers des modèles plus modernes est prise en compte. L’un des modèles les plus couramment utilisés pour l’apprentissage profond pratique est le réseau neuronal convolutif (CNN) profondément connecté. Cependant, il a été signalé que l’algorithme DFA est difficile à appliquer aux CNN standards. Par conséquent, la méthode proposée peut être difficile à appliquer de manière simple aux PNN convolutifs.
L'applicabilité au SNN est également un sujet important compte tenu de la mise en œuvre du matériel de simulation. L'applicabilité de la formation basée sur DFA au SNN a été signalée, ce qui signifie que le DFA amélioré proposé dans cette étude peut faciliter la formation.
Bien que les algorithmes basés sur DFA aient le potentiel d'être étendus à des modèles plus pratiques que le simple MLP ou RC, l'efficacité de l'application de la formation basée sur DFA à de tels réseaux reste inconnue. Ici, en tant que travail supplémentaire à cette étude, l'évolutivité de la formation basée sur DFA (DFA lui-même et DFA amélioré) vers les modèles mentionnés ci-dessus (MLP-Mixer, Vision transformer (ViT), ResNet et SNN) est étudiée. La formation basée sur DFA s'est avérée efficace même pour les modèles pratiques exploratoires. Bien que la précision réalisable de la formation basée sur DFA soit essentiellement inférieure à celle de la formation BP, certains ajustements du modèle et/ou de l'algorithme peuvent améliorer les performances. Notamment, la précision du DFA et du DFA augmenté était comparable pour tous les paramètres expérimentaux explorés, ce qui suggère que de nouvelles améliorations du DFA lui-même contribueront directement à l'amélioration du DFA augmenté. Les résultats montrent que la méthode peut être étendue à de futures implémentations de modèles pratiques de PNN, au-delà des simples modèles MLP ou RC.
Tableau 1 : Applicabilité de DFA amélioré aux modèles de réseau réels. (Source : Papier)

BP vs DFA dans le matériel physique
De manière générale, BP est très difficile à implémenter sur du matériel physique car il nécessite de calculer toutes les informations contenues dans le graphique. Par conséquent, la formation sur le matériel physique a toujours été réalisée au moyen de simulations informatiques, ce qui entraîne des coûts de calcul importants. De plus, les différences entre le modèle et le système réel conduisent à une précision réduite. En revanche, DFA amélioré ne nécessite pas de connaissances préalables précises sur le système physique. Par conséquent, dans les PNN profonds, les méthodes basées sur DFA sont plus efficaces que les méthodes basées sur BP en termes de précision. De plus, le matériel physique peut être utilisé pour accélérer les calculs.
De plus, la formation DFA ne nécessite pas de propagation d'erreur séquentielle calculée couche par couche, ce qui signifie que la formation de chaque couche peut être effectuée en parallèle. Par conséquent, une mise en œuvre DFA plus optimisée et parallèle pourrait conduire à des accélérations plus significatives. Ces caractéristiques uniques démontrent l'efficacité des méthodes basées sur DFA, en particulier pour les réseaux de neurones basés sur du matériel physique. D’un autre côté, la précision du modèle amélioré formé par DFA est toujours inférieure à celle du modèle formé par BP. Améliorer davantage la précision de la formation basée sur DFA reste un travail à venir.
Autre accélération physique
L'implémentation physique confirme l'accélération du traitement des boucles RC avec un grand nombre de nœuds. Cependant, ses avantages restent limités et des améliorations supplémentaires sont nécessaires. Le temps de traitement du prototype actuel est exprimé en transfert de données et en allocation de mémoire au FPGA. Par conséquent, l’intégration de tous les processus dans un FPGA améliorera considérablement les performances au détriment de la flexibilité expérimentale. De plus, à l’avenir, les méthodes optiques aéroportées réduiront considérablement les coûts de transmission. L'intégration optique à grande échelle et l'intégration sur puce amélioreront encore les performances du calcul optique lui-même.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Open source! Au-delà de ZoeDepth ! DepthFM : estimation rapide et précise de la profondeur monoculaire !
Apr 03, 2024 pm 12:04 PM
Open source! Au-delà de ZoeDepth ! DepthFM : estimation rapide et précise de la profondeur monoculaire !
Apr 03, 2024 pm 12:04 PM
0. À quoi sert cet article ? Nous proposons DepthFM : un modèle d'estimation de profondeur monoculaire génératif de pointe, polyvalent et rapide. En plus des tâches traditionnelles d'estimation de la profondeur, DepthFM démontre également des capacités de pointe dans les tâches en aval telles que l'inpainting en profondeur. DepthFM est efficace et peut synthétiser des cartes de profondeur en quelques étapes d'inférence. Lisons ce travail ensemble ~ 1. Titre des informations sur l'article : DepthFM : FastMonocularDepthEstimationwithFlowMatching Auteur : MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
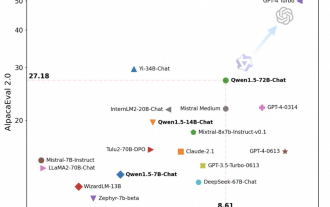 Tongyi Qianwen est à nouveau open source, Qwen1.5 propose six modèles de volume et ses performances dépassent GPT3.5
Feb 07, 2024 pm 10:15 PM
Tongyi Qianwen est à nouveau open source, Qwen1.5 propose six modèles de volume et ses performances dépassent GPT3.5
Feb 07, 2024 pm 10:15 PM
À temps pour la Fête du Printemps, la version 1.5 du modèle Tongyi Qianwen (Qwen) est en ligne. Ce matin, la nouvelle de la nouvelle version a attiré l'attention de la communauté IA. La nouvelle version du grand modèle comprend six tailles de modèle : 0,5B, 1,8B, 4B, 7B, 14B et 72B. Parmi eux, les performances de la version la plus puissante surpassent GPT3.5 et Mistral-Medium. Cette version inclut le modèle de base et le modèle Chat et fournit une prise en charge multilingue. L'équipe Tongyi Qianwen d'Alibaba a déclaré que la technologie pertinente avait également été lancée sur le site officiel de Tongyi Qianwen et sur l'application Tongyi Qianwen. De plus, la version actuelle de Qwen 1.5 présente également les points forts suivants : prend en charge une longueur de contexte de 32 Ko ; ouvre le point de contrôle du modèle Base+Chat ;
 Abandonnez l'architecture codeur-décodeur et utilisez le modèle de diffusion pour la détection des contours avec de meilleurs résultats. L'Université nationale de technologie de la défense a proposé DiffusionEdge.
Feb 07, 2024 pm 10:12 PM
Abandonnez l'architecture codeur-décodeur et utilisez le modèle de diffusion pour la détection des contours avec de meilleurs résultats. L'Université nationale de technologie de la défense a proposé DiffusionEdge.
Feb 07, 2024 pm 10:12 PM
Les réseaux actuels de détection des contours profonds adoptent généralement une architecture d'encodeur-décodeur, qui contient des modules d'échantillonnage ascendant et descendant pour mieux extraire les fonctionnalités à plusieurs niveaux. Cependant, cette structure limite le réseau à produire des résultats de détection de contour précis et détaillés. En réponse à ce problème, un article sur AAAI2024 propose une nouvelle solution. Titre de la thèse : DiffusionEdge : DiffusionProbabilisticModelforCrispEdgeDetection Auteurs : Ye Yunfan (Université nationale de technologie de la défense), Xu Kai (Université nationale de technologie de la défense), Huang Yuxing (Université nationale de technologie de la défense), Yi Renjiao (Université nationale de technologie de la défense), Cai Zhiping (Université nationale de technologie de la défense) Lien vers l'article : https ://ar
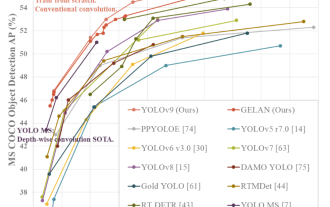 YOLO est immortel ! YOLOv9 est sorti : performances et vitesse SOTA~
Feb 26, 2024 am 11:31 AM
YOLO est immortel ! YOLOv9 est sorti : performances et vitesse SOTA~
Feb 26, 2024 am 11:31 AM
Les méthodes d'apprentissage profond d'aujourd'hui se concentrent sur la conception de la fonction objectif la plus appropriée afin que les résultats de prédiction du modèle soient les plus proches de la situation réelle. Dans le même temps, une architecture adaptée doit être conçue pour obtenir suffisamment d’informations pour la prédiction. Les méthodes existantes ignorent le fait que lorsque les données d’entrée subissent une extraction de caractéristiques couche par couche et une transformation spatiale, une grande quantité d’informations sera perdue. Cet article abordera des problèmes importants lors de la transmission de données via des réseaux profonds, à savoir les goulots d'étranglement de l'information et les fonctions réversibles. Sur cette base, le concept d'information de gradient programmable (PGI) est proposé pour faire face aux différents changements requis par les réseaux profonds pour atteindre des objectifs multiples. PGI peut fournir des informations d'entrée complètes pour la tâche cible afin de calculer la fonction objectif, obtenant ainsi des informations de gradient fiables pour mettre à jour les pondérations du réseau. De plus, un nouveau cadre de réseau léger est conçu
 Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas entre officiellement dans l’ère des robots électriques ! Hier, l'Atlas hydraulique s'est retiré "en larmes" de la scène de l'histoire. Aujourd'hui, Boston Dynamics a annoncé que l'Atlas électrique était au travail. Il semble que dans le domaine des robots humanoïdes commerciaux, Boston Dynamics soit déterminé à concurrencer Tesla. Après la sortie de la nouvelle vidéo, elle a déjà été visionnée par plus d’un million de personnes en seulement dix heures. Les personnes âgées partent et de nouveaux rôles apparaissent. C'est une nécessité historique. Il ne fait aucun doute que cette année est l’année explosive des robots humanoïdes. Les internautes ont commenté : Les progrès des robots ont fait ressembler la cérémonie d'ouverture de cette année à des êtres humains, et le degré de liberté est bien plus grand que celui des humains. Mais n'est-ce vraiment pas un film d'horreur ? Au début de la vidéo, Atlas est allongé calmement sur le sol, apparemment sur le dos. Ce qui suit est à couper le souffle
 La version Kuaishou de Sora 'Ke Ling' est ouverte aux tests : génère plus de 120 s de vidéo, comprend mieux la physique et peut modéliser avec précision des mouvements complexes
Jun 11, 2024 am 09:51 AM
La version Kuaishou de Sora 'Ke Ling' est ouverte aux tests : génère plus de 120 s de vidéo, comprend mieux la physique et peut modéliser avec précision des mouvements complexes
Jun 11, 2024 am 09:51 AM
Quoi? Zootopie est-elle concrétisée par l’IA domestique ? Avec la vidéo est exposé un nouveau modèle de génération vidéo domestique à grande échelle appelé « Keling ». Sora utilise une voie technique similaire et combine un certain nombre d'innovations technologiques auto-développées pour produire des vidéos qui comportent non seulement des mouvements larges et raisonnables, mais qui simulent également les caractéristiques du monde physique et possèdent de fortes capacités de combinaison conceptuelle et d'imagination. Selon les données, Keling prend en charge la génération de vidéos ultra-longues allant jusqu'à 2 minutes à 30 ips, avec des résolutions allant jusqu'à 1080p, et prend en charge plusieurs formats d'image. Un autre point important est que Keling n'est pas une démo ou une démonstration de résultats vidéo publiée par le laboratoire, mais une application au niveau produit lancée par Kuaishou, un acteur leader dans le domaine de la vidéo courte. De plus, l'objectif principal est d'être pragmatique, de ne pas faire de chèques en blanc et de se mettre en ligne dès sa sortie. Le grand modèle de Ke Ling est déjà sorti à Kuaiying.
 La vitalité de la super intelligence s'éveille ! Mais avec l'arrivée de l'IA qui se met à jour automatiquement, les mères n'ont plus à se soucier des goulots d'étranglement des données.
Apr 29, 2024 pm 06:55 PM
La vitalité de la super intelligence s'éveille ! Mais avec l'arrivée de l'IA qui se met à jour automatiquement, les mères n'ont plus à se soucier des goulots d'étranglement des données.
Apr 29, 2024 pm 06:55 PM
Je pleure à mort. Le monde construit à la folie de grands modèles. Les données sur Internet ne suffisent pas du tout. Le modèle de formation ressemble à « The Hunger Games », et les chercheurs en IA du monde entier se demandent comment nourrir ces personnes avides de données. Ce problème est particulièrement important dans les tâches multimodales. À une époque où rien ne pouvait être fait, une équipe de start-up du département de l'Université Renmin de Chine a utilisé son propre nouveau modèle pour devenir la première en Chine à faire de « l'auto-alimentation des données générées par le modèle » une réalité. De plus, il s’agit d’une approche à deux volets, du côté compréhension et du côté génération, les deux côtés peuvent générer de nouvelles données multimodales de haute qualité et fournir un retour de données au modèle lui-même. Qu'est-ce qu'un modèle ? Awaker 1.0, un grand modèle multimodal qui vient d'apparaître sur le Forum Zhongguancun. Qui est l'équipe ? Moteur Sophon. Fondé par Gao Yizhao, doctorant à la Hillhouse School of Artificial Intelligence de l’Université Renmin.
 L'US Air Force présente son premier avion de combat IA de grande envergure ! Le ministre a personnellement effectué l'essai routier sans intervenir pendant tout le processus, et 100 000 lignes de code ont été testées 21 fois.
May 07, 2024 pm 05:00 PM
L'US Air Force présente son premier avion de combat IA de grande envergure ! Le ministre a personnellement effectué l'essai routier sans intervenir pendant tout le processus, et 100 000 lignes de code ont été testées 21 fois.
May 07, 2024 pm 05:00 PM
Récemment, le milieu militaire a été submergé par la nouvelle : les avions de combat militaires américains peuvent désormais mener des combats aériens entièrement automatiques grâce à l'IA. Oui, tout récemment, l’avion de combat IA de l’armée américaine a été rendu public pour la première fois, dévoilant ainsi son mystère. Le nom complet de ce chasseur est Variable Stability Simulator Test Aircraft (VISTA). Il a été personnellement piloté par le secrétaire de l'US Air Force pour simuler une bataille aérienne en tête-à-tête. Le 2 mai, le secrétaire de l'US Air Force, Frank Kendall, a décollé à bord d'un X-62AVISTA à la base aérienne d'Edwards. Notez que pendant le vol d'une heure, toutes les actions de vol ont été effectuées de manière autonome par l'IA ! Kendall a déclaré : "Au cours des dernières décennies, nous avons réfléchi au potentiel illimité du combat air-air autonome, mais cela a toujours semblé hors de portée." Mais maintenant,
