
 Périphériques technologiques
IA
Comment la technologie du deep learning résout le problème des robots manipulant des objets déformables
Périphériques technologiques
IA
Comment la technologie du deep learning résout le problème des robots manipulant des objets déformables
Comment la technologie du deep learning résout le problème des robots manipulant des objets déformables

Traducteur | Li Rui
Critique | Sun Shujuan
Pour les humains, le traitement d'objets déformables n'est pas beaucoup plus difficile que le traitement d'objets rigides. Les gens apprennent naturellement à les façonner, à les plier et à les manipuler de différentes manières tout en étant capables de les reconnaître.

Mais pour les systèmes de robotique et d'intelligence artificielle, manipuler des objets déformables est un défi de taille. Par exemple, un robot doit suivre une série d’étapes pour façonner la pâte en croûte à pizza. Au fur et à mesure que la pâte change de forme, elle doit être enregistrée et suivie, et en même temps, elle doit choisir les bons outils pour chaque étape du travail. Ce sont des tâches difficiles pour les systèmes d’intelligence artificielle actuels, qui sont plus stables lorsqu’ils traitent des objets rigides aux états plus prévisibles.
Maintenant, une nouvelle technique d'apprentissage profond développée par des chercheurs du MIT, de l'Université Carnegie Mellon et de l'UC San Diego promet de rendre les systèmes robotiques plus stables lors de la manipulation d'objets déformables. La technologie, appelée DiffSkill, utilise des réseaux neuronaux profonds pour acquérir des compétences simples et un module de planification pour combiner ces compétences afin de résoudre des tâches nécessitant plusieurs étapes et outils.
Traitement d'objets déformables grâce à l'apprentissage par renforcement et au deep learning
Si un système d'intelligence artificielle veut traiter un objet, il doit être capable de détecter et définir son état et de prédire à quoi il ressemblera dans le futur. Pour les objets rigides, il s’agit d’un problème largement résolu. Avec un bon ensemble d’exemples de formation, un réseau neuronal profond sera capable de détecter des objets rigides sous différents angles. Lorsque des objets déformables sont impliqués, leurs multiples espaces d’états deviennent encore plus complexes.
Lin Xingyu, doctorant à l'Université Carnegie Mellon et auteur principal de l'article DiffSkill, a déclaré : « Pour un objet rigide, nous pouvons utiliser six nombres pour décrire son état : trois nombres représentent ses coordonnées XYZ, et les trois autres les nombres représentent sa direction.
Cependant, les objets déformables tels que la pâte ou le tissu ont des degrés de liberté infinis, ce qui rend leur état plus difficile à décrire avec précision, et la façon dont ils se déforment est également plus difficile à utiliser que l'approche mathématique de la modélisation. . ”
Le développement de simulateurs de physique différentiable permet l’application de méthodes basées sur le gradient pour résoudre des tâches de manipulation d’objets déformables. Ceci est différent des méthodes traditionnelles d’apprentissage par renforcement, qui tentent d’apprendre la dynamique de l’environnement et des objets par de pures interactions par essais et erreurs.
DiffSkill s'inspire de PlasticineLab, un simulateur de physique différentiable et présenté lors de la conférence ICLR 2021. PlasticineLab montre que les simulateurs différenciables peuvent aider dans les tâches à court terme.
PlasticineLab est un simulateur d'objets déformables basé sur la physique différentiable. Cela fonctionne bien pour la formation de modèles basés sur le gradient
, mais les simulateurs différenciables sont toujours confrontés au problème à long terme de nécessiter plusieurs étapes et d'utiliser différents outils. Les systèmes d’intelligence artificielle basés sur des simulateurs différenciables nécessitent également une connaissance de l’état complet de la simulation et des paramètres physiques associés de l’environnement. Ceci est particulièrement limitant pour les applications du monde réel, où les agents perçoivent généralement le monde à travers des données visuelles et de détection de profondeur (RVB-D).
Lin Xingyu a déclaré : « Nous avons commencé à nous demander si nous pouvions extraire les étapes nécessaires pour accomplir une tâche en compétences et apprendre des concepts abstraits sur les compétences afin de pouvoir les relier pour résoudre des tâches plus complexes. »
DiffSkill est un cadre dans. quels agents d'intelligence artificielle apprennent des abstractions de compétences à l'aide de modèles physiques différenciables et les combinent pour accomplir des tâches opérationnelles complexes.
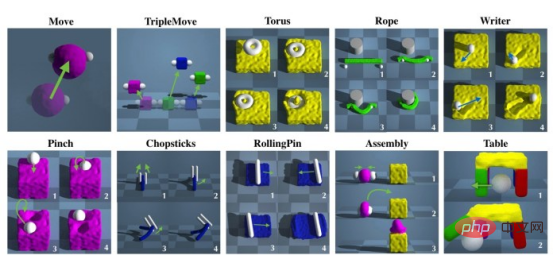
Ses travaux antérieurs se sont concentrés sur l'utilisation de l'apprentissage par renforcement pour manipuler des objets déformables tels que des tissus, des cordes et des liquides. Pour DiffSkill, il a choisi la manipulation de la pâte en raison des défis qu'elle présentait.
Il a déclaré : "La manipulation de la pâte est particulièrement intéressante car elle n'est pas facile à réaliser avec une pince robotisée, mais nécessite l'utilisation de différents outils en séquence, ce pour quoi les humains sont doués mais les robots sont moins courants.
Après la formation, DiffSkill." Un ensemble de tâches de manipulation de la pâte peut être réalisé avec succès en utilisant uniquement l'entrée RVB-D.
Utiliser les réseaux de neurones pour acquérir des compétences abstraites
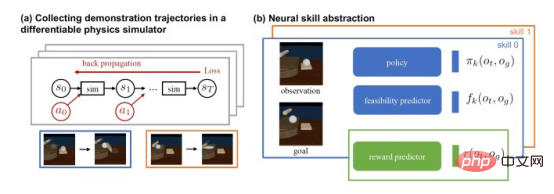
DiffSkill entraîne la faisabilité des réseaux de neurones pour prédire les états cibles à partir des états initiaux et des paramètres obtenus à partir de simulateurs de physique différentiable
DiffSkill se compose de deux éléments clés : l'un consiste à utiliser des réseaux de neurones Un « abstracteur de compétences neuronales » pour l'apprentissage de compétences individuelles, et un autre un « planificateur » pour résoudre des tâches à long terme.
DiffSkill utilise un simulateur de physique différenciable pour générer des exemples de formation pour les abstracteurs de compétences. Ces exemples montrent comment utiliser un seul outil pour atteindre des objectifs à court terme, comme utiliser un rouleau à pâtisserie pour étaler la pâte ou une spatule pour déplacer la pâte.
Ces exemples sont présentés à des abstracteurs qualifiés sous forme de vidéos RVB-D. À partir d’une observation d’image, l’abstracteur de compétences doit prédire si l’objectif souhaité est réalisable. Le modèle apprend et ajuste ses paramètres en comparant ses prédictions aux résultats réels d'un simulateur physique.
La manipulation robotisée d'objets déformables comme la pâte nécessite un raisonnement sur le long terme sur l'utilisation de différents outils. L'approche DiffSkill exploite des simulateurs différenciables pour apprendre et combiner les compétences nécessaires à ces tâches difficiles.
Pendant ce temps, DiffSkill entraîne des auto-encodeurs variationnels (VAE) pour apprendre les représentations spatiales latentes d'exemples générés par des simulateurs physiques. Les auto-encodeurs variationnels (VAE) conservent des fonctionnalités importantes et suppriment les informations non pertinentes pour la tâche. En convertissant l'espace d'image de grande dimension en espace latent, les auto-encodeurs variationnels (VAE) jouent un rôle important en permettant à DiffSkill de planifier sur des champs de vision plus longs et de prédire les résultats de l'observation des données sensorielles.
L'un des défis importants dans la formation d'un auto-encodeur variationnel (VAE) est de s'assurer qu'il apprend les fonctionnalités correctes et qu'il se généralise au monde réel. Dans le monde réel, la composition des données visuelles est différente de celle générée par un simulateur physique. Par exemple, la couleur du rouleau à pâtisserie ou de la planche à découper n'est pas pertinente pour la tâche, mais la position et l'angle du rouleau à pâtisserie et la position de la pâte le sont.
Actuellement, les chercheurs utilisent une technique appelée « randomisation de domaine », qui randomise les propriétés non pertinentes de l'environnement d'entraînement, telles que l'arrière-plan et l'éclairage, et préserve des caractéristiques importantes telles que la position et l'orientation de l'outil. Cela rend la formation des auto-encodeurs variationnels (VAE) plus stables lorsqu'ils sont appliqués au monde réel.
Lin Xingyu a déclaré : « Ce n'est pas facile de faire cela car nous devons couvrir toutes les différences possibles entre la simulation et le monde réel (appelé écart sim2real). Une meilleure façon est d'utiliser un nuage de points 3D comme représentation de la scène. Transfert plus facile de la simulation au monde réel. En fait, nous développons un projet de suivi utilisant des nuages de points comme entrée »
Tâche à long terme de planification d'objets déformables
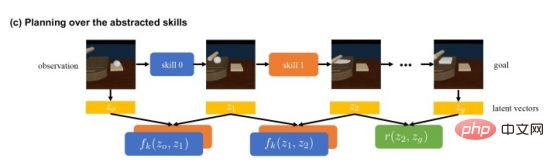
DiffSkill utilise le module de planification pour évaluer ce qui peut l'être. atteint. Différentes combinaisons et séquences de compétences
Une fois le résumé de compétences formé, DiffSkill utilise le module de planification pour résoudre des tâches à long terme. Les planificateurs doivent déterminer le nombre et la séquence de compétences requises pour passer de l'état initial à la destination.
Ce planificateur parcourt les combinaisons de compétences possibles et les résultats intermédiaires qu'elles produisent. Les auto-encodeurs variationnels sont utiles ici. Plutôt que de prédire les résultats d'images complets, DiffSkill utilise les VAE pour prédire les résultats spatiaux latents pour les étapes intermédiaires vers l'objectif final.
La combinaison de compétences d'abstraction et de représentation de l'espace latent rend le dessin de trajectoires depuis les états initiaux jusqu'aux objectifs plus efficace sur le plan informatique. En fait, les chercheurs n’ont pas eu besoin d’affiner la fonction de recherche mais ont mené une recherche exhaustive sur toutes les combinaisons.
Lin Xingyu a déclaré : « Puisque nous planifions des compétences, le travail de calcul ne sera pas trop important et le temps ne sera pas long. Cette recherche exhaustive élimine le besoin pour les planificateurs de concevoir des croquis, ce qui peut amener les concepteurs à ne pas concevoir en une manière plus générale d'envisager de nouvelles solutions, même si nous n'avons pas observé cela dans les tâches limitées que nous avons essayées. De plus, des techniques de recherche plus sophistiquées peuvent être appliquées. "
L'article DiffSkill indique : "Sur un seul GPU NVIDIA 2080Ti, chaque optimisation des ensembles de compétences peut être réalisée efficacement en 10 secondes environ »
Préparation de la pâte à pizza à l'aide de DiffSkill

Les chercheurs ont testé les performances de DiffSkill, en les comparant à plusieurs lignes de base qui ont été appliquées à des méthodes d'objets déformables, comprenant deux algorithmes d'apprentissage par renforcement sans modèle et un optimiseur de trajectoire utilisant uniquement des simulateurs physiques
Les modèles ont été testés sur plusieurs tâches nécessitant plusieurs étapes et outils. Dans l'une des tâches, par exemple, l'agent IA devait soulever la pâte avec une spatule, la placer sur une planche à découper, puis l'étaler avec un rouleau à pâtisserie.
Les résultats de la recherche montrent que DiffSkill est nettement meilleur que les autres technologies pour résoudre des tâches multi-outils à long terme en utilisant uniquement des informations sensorielles. Les expériences montrent qu'après avoir été bien formé, le planificateur de DiffSkill peut trouver un bon état intermédiaire entre l'état initial et l'état cible, et trouver une séquence de compétences appropriée pour résoudre la tâche.
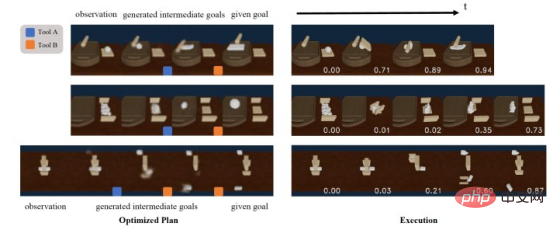
Le planificateur de DiffSkill peut prédire les étapes intermédiaires avec une grande précision
Lin Xingyu a déclaré : « L'un des points clés est qu'un ensemble de compétences peut fournir une abstraction temporelle très importante qui nous permet de raisonner sur le long terme. Cela est également similaire à la façon dont les humains gèrent différentes tâches : penser différemment. des abstractions temporelles, plutôt que de réfléchir à ce qu'il faut faire ensuite. »
Cependant, la capacité de DiffSkill est également limitée. Par exemple, les performances de DiffSkill ont considérablement diminué lors de l'exécution de l'une des tâches nécessitant une planification en trois étapes (bien qu'elles aient toujours surpassé les autres techniques). Lin Xingyu a également mentionné que dans certains cas, le prédicteur de faisabilité peut produire des faux positifs. Les chercheurs pensent que l’apprentissage de meilleurs espaces latents peut aider à résoudre ce problème.
Les chercheurs explorent également d'autres directions pour améliorer DiffSkill, notamment un algorithme de planification plus efficace qui peut être utilisé pour des tâches plus longues.
Lin Xingyu a déclaré qu'il espère qu'un jour, il pourra utiliser DiffSkill sur un vrai robot fabricant de pizza. Il a déclaré : "Nous en sommes encore loin. Divers défis sont apparus en termes de contrôle, de transfert sim2real et de sécurité. Mais nous sommes désormais plus confiants pour essayer de mener à bien certaines tâches à long terme."
Cette technique d'apprentissage profond résout l'un des défis difficiles de la robotique, par Ben Dickson
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Bytedance Cutting lance le super abonnement SVIP : 499 yuans pour un abonnement annuel continu, offrant une variété de fonctions d'IA
Jun 28, 2024 am 03:51 AM
Bytedance Cutting lance le super abonnement SVIP : 499 yuans pour un abonnement annuel continu, offrant une variété de fonctions d'IA
Jun 28, 2024 am 03:51 AM
Ce site a rapporté le 27 juin que Jianying est un logiciel de montage vidéo développé par FaceMeng Technology, une filiale de ByteDance. Il s'appuie sur la plateforme Douyin et produit essentiellement du contenu vidéo court pour les utilisateurs de la plateforme. Il est compatible avec iOS, Android et. Windows, MacOS et autres systèmes d'exploitation. Jianying a officiellement annoncé la mise à niveau de son système d'adhésion et a lancé un nouveau SVIP, qui comprend une variété de technologies noires d'IA, telles que la traduction intelligente, la mise en évidence intelligente, l'emballage intelligent, la synthèse humaine numérique, etc. En termes de prix, les frais mensuels pour le clipping SVIP sont de 79 yuans, les frais annuels sont de 599 yuans (attention sur ce site : équivalent à 49,9 yuans par mois), l'abonnement mensuel continu est de 59 yuans par mois et l'abonnement annuel continu est de 59 yuans par mois. est de 499 yuans par an (équivalent à 41,6 yuans par mois) . En outre, le responsable de Cut a également déclaré que afin d'améliorer l'expérience utilisateur, ceux qui se sont abonnés au VIP d'origine
 Assistant de codage d'IA augmenté par le contexte utilisant Rag et Sem-Rag
Jun 10, 2024 am 11:08 AM
Assistant de codage d'IA augmenté par le contexte utilisant Rag et Sem-Rag
Jun 10, 2024 am 11:08 AM
Améliorez la productivité, l’efficacité et la précision des développeurs en intégrant une génération et une mémoire sémantique améliorées par la récupération dans les assistants de codage IA. Traduit de EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG, auteur JanakiramMSV. Bien que les assistants de programmation d'IA de base soient naturellement utiles, ils ne parviennent souvent pas à fournir les suggestions de code les plus pertinentes et les plus correctes, car ils s'appuient sur une compréhension générale du langage logiciel et des modèles d'écriture de logiciels les plus courants. Le code généré par ces assistants de codage est adapté à la résolution des problèmes qu’ils sont chargés de résoudre, mais n’est souvent pas conforme aux normes, conventions et styles de codage des équipes individuelles. Cela aboutit souvent à des suggestions qui doivent être modifiées ou affinées pour que le code soit accepté dans l'application.
 Le réglage fin peut-il vraiment permettre au LLM d'apprendre de nouvelles choses : l'introduction de nouvelles connaissances peut amener le modèle à produire davantage d'hallucinations
Jun 11, 2024 pm 03:57 PM
Le réglage fin peut-il vraiment permettre au LLM d'apprendre de nouvelles choses : l'introduction de nouvelles connaissances peut amener le modèle à produire davantage d'hallucinations
Jun 11, 2024 pm 03:57 PM
Les grands modèles linguistiques (LLM) sont formés sur d'énormes bases de données textuelles, où ils acquièrent de grandes quantités de connaissances du monde réel. Ces connaissances sont intégrées à leurs paramètres et peuvent ensuite être utilisées en cas de besoin. La connaissance de ces modèles est « réifiée » en fin de formation. À la fin de la pré-formation, le modèle arrête effectivement d’apprendre. Alignez ou affinez le modèle pour apprendre à exploiter ces connaissances et répondre plus naturellement aux questions des utilisateurs. Mais parfois, la connaissance du modèle ne suffit pas, et bien que le modèle puisse accéder à du contenu externe via RAG, il est considéré comme bénéfique de l'adapter à de nouveaux domaines grâce à un réglage fin. Ce réglage fin est effectué à l'aide de la contribution d'annotateurs humains ou d'autres créations LLM, où le modèle rencontre des connaissances supplémentaires du monde réel et les intègre.
 Sept questions d'entretien technique Cool GenAI et LLM
Jun 07, 2024 am 10:06 AM
Sept questions d'entretien technique Cool GenAI et LLM
Jun 07, 2024 am 10:06 AM
Pour en savoir plus sur l'AIGC, veuillez visiter : 51CTOAI.x Community https://www.51cto.com/aigc/Translator|Jingyan Reviewer|Chonglou est différent de la banque de questions traditionnelle que l'on peut voir partout sur Internet. nécessite de sortir des sentiers battus. Les grands modèles linguistiques (LLM) sont de plus en plus importants dans les domaines de la science des données, de l'intelligence artificielle générative (GenAI) et de l'intelligence artificielle. Ces algorithmes complexes améliorent les compétences humaines et stimulent l’efficacité et l’innovation dans de nombreux secteurs, devenant ainsi la clé permettant aux entreprises de rester compétitives. LLM a un large éventail d'applications. Il peut être utilisé dans des domaines tels que le traitement du langage naturel, la génération de texte, la reconnaissance vocale et les systèmes de recommandation. En apprenant de grandes quantités de données, LLM est capable de générer du texte
 Cinq écoles d'apprentissage automatique que vous ne connaissez pas
Jun 05, 2024 pm 08:51 PM
Cinq écoles d'apprentissage automatique que vous ne connaissez pas
Jun 05, 2024 pm 08:51 PM
L'apprentissage automatique est une branche importante de l'intelligence artificielle qui donne aux ordinateurs la possibilité d'apprendre à partir de données et d'améliorer leurs capacités sans être explicitement programmés. L'apprentissage automatique a un large éventail d'applications dans divers domaines, de la reconnaissance d'images et du traitement du langage naturel aux systèmes de recommandation et à la détection des fraudes, et il change notre façon de vivre. Il existe de nombreuses méthodes et théories différentes dans le domaine de l'apprentissage automatique, parmi lesquelles les cinq méthodes les plus influentes sont appelées les « Cinq écoles d'apprentissage automatique ». Les cinq grandes écoles sont l’école symbolique, l’école connexionniste, l’école évolutionniste, l’école bayésienne et l’école analogique. 1. Le symbolisme, également connu sous le nom de symbolisme, met l'accent sur l'utilisation de symboles pour le raisonnement logique et l'expression des connaissances. Cette école de pensée estime que l'apprentissage est un processus de déduction inversée, à travers les connaissances existantes.
 Afin de fournir un nouveau système de référence et d'évaluation de questions-réponses scientifiques et complexes pour les grands modèles, l'UNSW, Argonne, l'Université de Chicago et d'autres institutions ont lancé conjointement le cadre SciQAG.
Jul 25, 2024 am 06:42 AM
Afin de fournir un nouveau système de référence et d'évaluation de questions-réponses scientifiques et complexes pour les grands modèles, l'UNSW, Argonne, l'Université de Chicago et d'autres institutions ont lancé conjointement le cadre SciQAG.
Jul 25, 2024 am 06:42 AM
L'ensemble de données ScienceAI Question Answering (QA) joue un rôle essentiel dans la promotion de la recherche sur le traitement du langage naturel (NLP). Des ensembles de données d'assurance qualité de haute qualité peuvent non seulement être utilisés pour affiner les modèles, mais également évaluer efficacement les capacités des grands modèles linguistiques (LLM), en particulier la capacité à comprendre et à raisonner sur les connaissances scientifiques. Bien qu’il existe actuellement de nombreux ensembles de données scientifiques d’assurance qualité couvrant la médecine, la chimie, la biologie et d’autres domaines, ces ensembles de données présentent encore certaines lacunes. Premièrement, le formulaire de données est relativement simple, et la plupart sont des questions à choix multiples. Elles sont faciles à évaluer, mais limitent la plage de sélection des réponses du modèle et ne peuvent pas tester pleinement la capacité du modèle à répondre aux questions scientifiques. En revanche, les questions et réponses ouvertes
 AlphaFold 3 est lancé, prédisant de manière exhaustive les interactions et les structures des protéines et de toutes les molécules de la vie, avec une précision bien plus grande que jamais
Jul 16, 2024 am 12:08 AM
AlphaFold 3 est lancé, prédisant de manière exhaustive les interactions et les structures des protéines et de toutes les molécules de la vie, avec une précision bien plus grande que jamais
Jul 16, 2024 am 12:08 AM
Editeur | Radis Skin Depuis la sortie du puissant AlphaFold2 en 2021, les scientifiques utilisent des modèles de prédiction de la structure des protéines pour cartographier diverses structures protéiques dans les cellules, découvrir des médicaments et dresser une « carte cosmique » de chaque interaction protéique connue. Tout à l'heure, Google DeepMind a publié le modèle AlphaFold3, capable d'effectuer des prédictions de structure conjointe pour des complexes comprenant des protéines, des acides nucléiques, de petites molécules, des ions et des résidus modifiés. La précision d’AlphaFold3 a été considérablement améliorée par rapport à de nombreux outils dédiés dans le passé (interaction protéine-ligand, interaction protéine-acide nucléique, prédiction anticorps-antigène). Cela montre qu’au sein d’un cadre unique et unifié d’apprentissage profond, il est possible de réaliser
 Les performances de SOTA, la méthode d'IA de prédiction d'affinité protéine-ligand multimodale de Xiamen, combinent pour la première fois des informations sur la surface moléculaire
Jul 17, 2024 pm 06:37 PM
Les performances de SOTA, la méthode d'IA de prédiction d'affinité protéine-ligand multimodale de Xiamen, combinent pour la première fois des informations sur la surface moléculaire
Jul 17, 2024 pm 06:37 PM
Editeur | KX Dans le domaine de la recherche et du développement de médicaments, il est crucial de prédire avec précision et efficacité l'affinité de liaison des protéines et des ligands pour le criblage et l'optimisation des médicaments. Cependant, les études actuelles ne prennent pas en compte le rôle important des informations sur la surface moléculaire dans les interactions protéine-ligand. Sur cette base, des chercheurs de l'Université de Xiamen ont proposé un nouveau cadre d'extraction de caractéristiques multimodales (MFE), qui combine pour la première fois des informations sur la surface des protéines, la structure et la séquence 3D, et utilise un mécanisme d'attention croisée pour comparer différentes modalités. alignement. Les résultats expérimentaux démontrent que cette méthode atteint des performances de pointe dans la prédiction des affinités de liaison protéine-ligand. De plus, les études d’ablation démontrent l’efficacité et la nécessité des informations sur la surface des protéines et de l’alignement des caractéristiques multimodales dans ce cadre. Les recherches connexes commencent par "S
