
 Périphériques technologiques
IA
Un article sur les caractéristiques techniques de sécurité des voitures autonomes
Périphériques technologiques
IA
Un article sur les caractéristiques techniques de sécurité des voitures autonomes
Un article sur les caractéristiques techniques de sécurité des voitures autonomes

« La sécurité avant tout » est le concept fondamental et la valeur de la conduite autonome. La conception globale de la sécurité du système des véhicules autonomes est une ingénierie de système complexe, impliquant la conception de la stratégie d'algorithme de base du système de conduite autonome du véhicule, la conception de la sécurité redondante du matériel et des logiciels, la technologie de conduite cloud à distance, la technologie de vérification des tests complets, etc., et suit les exigences et les considérations de conception pour la sécurité fonctionnelle (ISO 26262) et la sécurité fonctionnelle prévue (ISO/PAS 21448). Passons en revue les pratiques du système de sécurité de conduite autonome L4 de Baidu, qui sont divisées en systèmes de sécurité à trois niveaux : sécurité du système principal, système de sécurité redondant et système de conduite cloud à distance.

Figure 1 Idée de conception globale de sécurité du système Baidu L4

Sécurité du système principal de conduite autonome
Sécurité du système principal système C'est-à-dire à travers le système de conduite automatique de bord La couche d'algorithme de base assure la sécurité des stratégies de conduite et des comportements de conduite, qui peut également être appelée « sécurité stratégique ». Utiliser les algorithmes de perception et de positionnement les plus avancés et les plus fiables, la planification prédictive de la prise de décision et les algorithmes de contrôle pour faire face à divers scénarios sur la route. En particulier, il est nécessaire d'assurer la sécurité des stratégies et des comportements de conduite face à des scénarios difficiles.
La sécurité du système principal de conduite autonome est la conception de sécurité de la suite logicielle et matérielle. Les algorithmes logiciels sont au cœur de l'ensemble du système de conduite autonome. Une architecture typique d'un système d'algorithme de conduite autonome L4 comprend principalement des systèmes d'exploitation embarqués, une perception de l'environnement, des cartes et un positionnement de haute précision, une prise de décision et une planification prédictives, des modules de contrôle et d'exécution, etc.
Système d'exploitation
Le système d'exploitation de base est le logiciel de base qui s'exécute sur les véhicules autonomes pour gérer, planifier et contrôler les ressources logicielles et matérielles embarquées. Sa tâche principale est de fournir une planification des tâches en temps réel, une isolation des ressources des tâches informatiques en temps réel, une communication de messages en temps réel, un contrôle d'accès au niveau du système et d'autres capacités pour le système de conduite autonome, de gérer efficacement les ressources du système, d'améliorer l'utilisation des ressources du système, et protège le matériel et les logiciels du module d'algorithme du véhicule autonome. Les caractéristiques physiques et les détails opérationnels contiennent des composants essentiels de la conduite autonome tels que la perception des opérations, le positionnement, la prise de décision en matière de planification et le contrôle. Le système d'exploitation présente les caractéristiques d'une stabilité élevée, de performances en temps réel et d'une faible latence (la vitesse de réponse est 250 ms supérieure à celle d'un pilote humain).
Système de détection panoramique
La perception de l'environnement est une condition préalable à la conduite autonome. Le système de perception de l'environnement intègre les avantages de plusieurs capteurs tels que le lidar, le radar à ondes millimétriques et les caméras pour obtenir un champ de vision à 360 degrés autour de la carrosserie du véhicule, détecter et suivre de manière stable les comportements de circulation, la vitesse, la direction et d'autres informations de manière complexe. et l'évolution des environnements de circulation, et fournit des informations pour la prise de décision et la planification. Le module fournit des informations sur la compréhension de la scène.
L'algorithme de perception adopte un cadre de fusion multi-capteurs et peut permettre la détection d'obstacles jusqu'à 280 mètres de distance. Basé sur des réseaux neuronaux profonds et des données massives de conduite autonome, il peut identifier avec précision les types d'obstacles et suivre de manière stable le comportement des obstacles, offrant ainsi des capacités de perception stables pour les modules de prise de décision en aval. Le système de perception basé sur la solution de fusion multicapteurs forme une redondance via des canaux de détection hétérogènes, offrant une tolérance élevée aux pannes pour le système de conduite autonome et améliorant ainsi la sécurité du système.
De plus, l'algorithme de perception prend également en charge efficacement l'expansion de la scène grâce à des fonctionnalités telles que la reconnaissance du bruit du brouillard d'eau, la détection de faibles obstacles et la détection de feux de circulation et de panneaux de forme spéciale. En termes de reconnaissance des feux de circulation, la couleur des feux de circulation et le compte à rebours reconnus par la détection automatique du véhicule peuvent être vérifiés de manière croisée avec les informations préalables fournies par des cartes de haute précision, tout en améliorant la capacité de reconnaissance temporaire des feux de circulation pour garantir la fiabilité et la sécurité.
Des cartes de haute précision et un positionnement de haute précision fournissent aux véhicules autonomes des informations routières avancées, des informations précises sur la position du véhicule et de riches informations sur les éléments de la route, mettant l'accent sur le modèle tridimensionnel et la précision de l'espace, et affichant chaque caractéristique de la route avec une grande précision. .et l'état. La cartographie et le positionnement de haute précision adoptent une solution de fusion multi-capteurs de lidar, vision, RTK et IMU Grâce à la fusion de plusieurs capteurs, la précision de positionnement peut atteindre 5 à 10 cm, répondant aux besoins de la conduite autonome L4.
Prise de décision prédictive et contrôle de la planification
Le module technologique de prise de décision prédictive et de contrôle de la planification est équivalent au cerveau d'une voiture autonome. La prise de décision et la planification prédictives sont les modules centraux des algorithmes logiciels, qui affectent directement la capacité et l'effet de la conduite autonome des véhicules. Ce module d'algorithme s'appuie sur des spécifications de sécurité routière et des règles consensuelles pour planifier des parcours et des trajectoires de conduite sûrs, efficaces et confortables pour les véhicules. Afin de mieux améliorer la capacité de généralisation de l'algorithme, des algorithmes d'exploration de données et d'apprentissage profond sont appliqués pour réaliser une planification intelligente du comportement de conduite.
Après avoir donné le point de départ et la destination définis par le véhicule, le système génère le trajet global planifié optimal. Le véhicule peut recevoir les informations sur l'environnement et les obstacles fournies par le module de perception en temps réel, les combiner avec des cartes de haute précision, suivre et prédire les intentions comportementales et les trajectoires prévues des véhicules environnants, des piétons, des cyclistes ou d'autres obstacles, en assurant sécurité, confort. et l'efficacité en considération. Générer des décisions de comportement de conduite (suivi, changement de voie, stationnement, etc.) et planifier le fonctionnement du véhicule (vitesse, trajectoire, etc.) conformément aux règles de la circulation et à l'étiquette de circulation civilisée, et enfin les transmettre au module de commande pour mettre en œuvre les actions d’accélération, de décélération et de direction du véhicule. La partie de commande du véhicule est la couche la plus basse et communique directement avec le châssis du véhicule. Elle transmet la position cible et la vitesse du véhicule au châssis via des signaux électriques pour faire fonctionner l'accélérateur, le frein et le volant.
L'objectif de la conduite autonome est de faire face à des scénarios de circulation complexes sur les routes urbaines et de garantir que les véhicules autonomes sont dans un état de conduite sûr dans toutes les conditions de circulation routière. Au niveau de l'algorithme logiciel, il existe des modèles d'apprentissage profond formés sur la base de données de test massives pour garantir une circulation sûre, efficace et fluide des véhicules autonomes dans des scénarios de conduite réguliers ; au niveau de la couche d'algorithme de sécurité, une série de stratégies de conduite sûre sont conçues pour divers types typiques ; scénarios dangereux. Veiller à ce que les véhicules autonomes puissent adopter des comportements de conduite sûrs dans tous les scénarios. Par exemple, dans des scénarios extrêmes tels que du mauvais temps et une vision bloquée, des stratégies de conduite défensive seront déclenchées et les risques pour la sécurité pourront être réduits en ralentissant et en observant davantage.
Les véhicules à conduite autonome respectent davantage les règles de circulation et la priorité routière. Lorsqu'ils rencontrent d'autres usagers de la route aux intersections routières et lorsqu'ils rencontrent des véhicules concurrents dans des situations à priorité élevée, ils considéreront également la sécurité en premier. et céder le passage pour éviter les risques. Lorsque nous serons confrontés à des scénarios à haut risque tels que des « sondes fantômes », nous respecterons le principe de sécurité avant tout et adopterons des stratégies de freinage d'urgence pour éviter autant que possible les blessures. Avec l'accumulation de données d'essais routiers de conduite autonome et d'une grande quantité de données de scènes extrêmes, l'algorithme de base de conduite autonome a continué d'évoluer grâce à des modèles d'algorithmes d'apprentissage profond basés sur les données, devenant un « vieux conducteur » capable de prédire à l'avance et de conduire en toute sécurité. et avec prudence.
Collaboration véhicule-route
La conduite autonome collaborative véhicule-route est basée sur la conduite autonome intelligente d'un seul véhicule et connecte de manière organique les éléments de participation au transport « personnes-véhicule-route-nuage » via l'Internet de Véhicules. Réalisez une interaction et un partage d'informations dynamiques et en temps réel entre les véhicules, les véhicules et les routes, et les véhicules et les personnes pour garantir la sécurité routière. Grâce à l'interaction et à la collaboration d'informations, à la détection collaborative et au contrôle collaboratif de la prise de décision, la conduite autonome collaborative véhicule-route peut élargir considérablement la plage de perception d'un véhicule unique, améliorer ses capacités de perception et introduire de nouveaux éléments intelligents représentés par des données de grande dimension pour atteindre intelligence de groupe. Il peut aider à résoudre les goulots d'étranglement techniques rencontrés par la conduite autonome intelligente des vélos, à améliorer les capacités de conduite autonome, garantissant ainsi la sécurité de la conduite autonome et à élargir le domaine de conception opérationnelle (ODD) de la conduite autonome.
Par exemple, la conduite autonome collaborative véhicule-route peut résoudre le problème de l'intelligence du vélo qui est facilement affectée par des conditions environnementales telles que l'occlusion et les intempéries, et le problème de la perception collaborative des angles morts/occlusion dynamiques et statiques. La conduite autonome intelligente des vélos est limitée par l'angle de détection du capteur. Lorsqu'il est bloqué par des obstacles statiques ou dynamiques (tels que de gros véhicules), l'AV ne peut pas obtenir avec précision le mouvement des véhicules ou des piétons dans l'angle mort. La collaboration véhicule-route réalise une détection et une reconnaissance continues multidirectionnelles et longue distance grâce au déploiement de plusieurs capteurs sur le bord de la route, et l'intègre à la perception AV pour obtenir une perception et une reconnaissance précises des véhicules ou des piétons dans les angles morts par les véhicules autonomes, et les véhicules peuvent faire des prédictions à l'avance et contrôler la prise de décision, réduisant ainsi le risque d'accidents.

Figure 2 Détection collaborative de sonde fantôme de véhicule non motorisé/piéton dans des zones aveugles dynamiques et statiques

Figure 3 Détection collaborative de route de véhicule bloqué à une intersection

Système redondant de sécurité de conduite automatique
Selon la norme "ISO 26262 Sécurité fonctionnelle des véhicules routiers", la sécurité fonctionnelle du système doit prendre en compte les exigences de redondance fonctionnelle. Selon les normes de conception de sécurité fonctionnelle, la redondance fonctionnelle est réalisée à trois niveaux : niveau composant, niveau système et niveau véhicule. La conception du système redondant est la clé pour garantir une conduite autonome sûre et contrôlable. S'appuyant sur une conception redondante complète, elle peut traiter efficacement les pannes ponctuelles ou les pannes fonctionnelles aux trois niveaux du système de contrôle du véhicule, de la plate-forme matérielle et de la plate-forme logicielle. fournissant un système de conduite autonome entièrement sans pilote.
Le système de conduite autonome de niveau L4 est équipé d'une redondance de sécurité en plus de l'unité informatique principale embarquée et du système de détection pour obtenir une conception redondante hétérogène des logiciels et du matériel, évitant les points de défaillance uniques de chaque système principal. Le système informatique et les systèmes de sécurité redondants ont des divisions de travail différentes et se vérifient mutuellement, améliorant considérablement la sécurité et la fiabilité dans leur ensemble. En termes de conception de stratégie de fonction et d'algorithme, le système de sécurité redondant se concentre sur la surveillance en temps réel du logiciel et du matériel du système informatique principal et sur l'identification des dangers. Lorsqu'une anomalie dans le système informatique principal est détectée, le mécanisme MRC sera déclenché, via. alarmes, freinage lent et arrêt, freinage d'urgence et autres méthodes pour mettre le véhicule dans la condition de risque minimal (MRC).
Redondance du matériel et des capteurs
Des capteurs, unités informatiques aux systèmes de contrôle des véhicules, il existe deux systèmes indépendants et redondants pour éviter les points de défaillance uniques et améliorer la fiabilité et la sécurité globales du système.
Redondance de l'unité informatique
Le système de sécurité configure un ensemble de SafetyDCU comme une unité informatique redondante pour effectuer des calculs en temps réel et surveiller l'état de fonctionnement du système principal. Lorsque l'unité de calcul principale tombe en panne, l'algorithme qui peut prendre en charge le système redondant peut continuer à contrôler le véhicule et effectuer un freinage lent, un arrêt et d'autres actions avec un risque minimal de retour en arrière.
Redondance des capteurs
Le système de sécurité adopte une conception redondante de deux systèmes de capteurs de conduite autonomes indépendants, utilisant un lidar, des caméras, un équipement de positionnement et d'autres solutions de redondance de composants pour éviter la défaillance d'un seul composant en toutes circonstances. , le système redondant peut être déclenché pour fournir des capacités parfaites de perception de l'environnement, contrôlant ainsi le véhicule en toute sécurité et garantissant un fonctionnement plus fiable du système.
Redondance du système de contrôle du véhicule
Le châssis du véhicule dispose de capacités redondantes, y compris des composants clés tels que la direction, l'alimentation et le freinage, lorsqu'un seul système tombe en panne, il peut passer à un système de secours pour contrôler le véhicule. pour plus de sécurité Arrêtez le véhicule pour éviter qu'il ne perde le contrôle.
Système de surveillance des pannes et redondance logicielle
Le système de surveillance des pannes est un système complet de détection des pannes déployé entre l'unité informatique principale et l'unité informatique de sécurité. Il peut surveiller tous les types de logiciels et de matériel dans le fonctionnement du système. Les pannes, les dysfonctionnements, le dépassement de la plage ODD, les défauts de l'algorithme du système, etc. sont détectés et surveillés en temps réel, et le système principal et le système redondant sont vérifiés de manière croisée, mutuellement vérifiés et surveillés pour garantir qu'aucun défaut n'est manqué. Dans le même temps, la prédiction des risques est effectuée, les données sujettes aux problèmes sont extraites, analysées et les fonctionnalités extraites, et des calculs de risques de sécurité en temps réel ont été effectués du côté du véhicule.
Le système de redondance logicielle est un ensemble complet de logiciels légers de positionnement de perception et de contrôle de prise de décision. Par exemple, la redondance complète du système de positionnement ajoute plusieurs validations croisées pour améliorer la capacité de détection des anomalies de positionnement et la tolérance aux pannes ; il détecte une couverture de détection périphérique à 360 degrés pour obtenir une perception en temps réel des risques environnants et avancés de la carrosserie du véhicule ; lorsqu'un défaut ou une panne du système principal est détecté, le système de secours prend le contrôle du véhicule en son nom, déclassant les fonctions ou entrant dans le MRC via la limitation de vitesse, le freinage lent, l'arrêt, le freinage, etc., pour obtenir un stationnement sûr du véhicule.

Figure 4 Système de surveillance des défauts et redondance logicielle

Système de conduite cloud à distance somnolent ou extrême Dans la scène, le conducteur à distance prend le contrôle du véhicule et affiche l'environnement modèle, vision principale et perspective aérienne à travers l'écran périphérique, offrant à l'agent de sécurité une expérience de conduite parallèle immersive. Lorsque le conducteur distant conduit le véhicule vers une zone de sécurité et remet ensuite le contrôle à la voiture, le délai de bout en bout de l'ensemble du processus est plus court que le temps de réaction d'un conducteur humain, et le changement de contrôle entre la voiture et la télécommande est complètement fluide et transparente. Dans le cockpit distant, la surveillance en temps réel au niveau de la flotte peut être réalisée en configurant une surveillance multi-écrans et via des fonctions telles que l'avertissement de risque et la planification dynamique.
La conduite cloud à distance a une conception complète en couches de sécurité comprenant la sécurité active, les avertissements de sécurité et les fonctions de sécurité de base. Elle peut surveiller l'état du cockpit, du réseau et des véhicules sans conducteur en temps réel, ainsi que l'état du cockpit et du réseau. et les véhicules sans conducteur en fonction de différents défauts ou niveaux de risque. Prendre des mesures de sécurité pour protéger davantage les opérations de conduite autonome. La technologie de conduite autonome actuelle utilise principalement des systèmes de conduite autonome côté véhicule pour réaliser une conduite autonome sur les routes urbaines classiques, et s'appuie uniquement sur la conduite à distance dans le cloud dans des scénarios extrêmes. Elle peut donc fournir des services d'exploitation efficaces dans lesquels un conducteur distant peut contrôler plusieurs véhicules.
Figure 5 Conception d'un produit de conduite dans le cloud à distance 
La conduite parallèle est basée sur la technologie 5G L'opérateur de sécurité du centre de contrôle à distance peut comprendre l'environnement et l'état du véhicule en temps réel, et. la voiture et le cloud sont connectés de manière transparente. Assistance à distance complète dans les scénarios où la conduite autonome ne peut pas passer, et ramener le véhicule à l'état de conduite autonome une fois terminé pour permettre l'évasion et l'évitement du véhicule dans des scénarios extrêmes.
La conduite cloud 5G est une installation de soutien importante pour la conduite autonome à l'avenir. Basée sur de nouvelles infrastructures telles que la 5G, les transports intelligents et le V2X, elle peut réaliser une surveillance en temps réel des vidéos à l'intérieur et à l'extérieur du véhicule autonome. , qui peut être effectué sans fil sur le véhicule, la condition du conducteur comblera le manque de capacités du système de conduite autonome.
Figure 6 Scénarios applicables pour la conduite à distance dans le cloud
Test et vérification du système de conduite autonome
, il faut être pleinement testé sur la sécurité fonctionnelle et la sécurité des performances vérification pour prouver sa sécurité de fonctionnement afin de protéger la sécurité personnelle des utilisateurs du véhicule et des autres usagers de la route. La simulation virtuelle nécessite des centaines de millions à des dizaines de milliards de kilomètres de tests de vérification, et les essais sur route réels nécessitent plus d'un million de kilomètres d'accumulation de tests.
Système de processus de test
Le test de conduite autonome utilise une méthode de test basée sur des scénarios pour vérifier s'il possède des capacités de conduite sûre dans chaque scénario. La bibliothèque de scénarios de tests de conduite autonome constitue la base du système de test et pilote tous les aspects des tests de véhicules autonomes.
La bibliothèque de scénarios de test comprend des scénarios de conduite quotidienne typiques, des scénarios à risque de collision élevé, des scénarios juridiques et réglementaires, etc. Elle comprend également des scénarios qui ont formé des normes de l'industrie, tels que des scénarios de test standard pour les fonctions AEB. Plus précisément, il est divisé en différentes conditions naturelles (météo, éclairage), différents types de routes (états de la chaussée, types de lignes de voie, etc.), différents acteurs de la circulation (véhicules, emplacements pour piétons, vitesse, etc.), différents types d'environnement (autoroutes). , zones résidentielles, centres commerciaux, plusieurs types de scénarios de tests de simulation virtuelle (zones rurales, etc.) et scénarios de tests dans des environnements de trafic réels. Le contenu du test comprend des capteurs, des algorithmes, des actionneurs, des interfaces homme-machine et des véhicules complets, etc., pour vérifier la rationalité du système de conduite autonome sous divers aspects tels que les fonctions d'application, les performances, la stabilité et la robustesse, la sécurité fonctionnelle, les fonctionnalités attendues. sécurité, certification de type, etc. performances, sécurité et stabilité, garantissant ainsi que les véhicules peuvent prendre la route de manière autonome.
Le système de processus de test des voitures autonomes comprend principalement trois étapes : les tests en environnement hors ligne, les tests de véhicules en boucle (Vehicle in the Loop, VIL) et les tests sur route en boucle (Road in the Loop, RIL) Pour les logiciels et le matériel, les véhicules sont soumis à des tests de verrouillage couche par couche pour garantir la sécurité du système de conduite autonome pour les essais sur route. Dans la phase de test hors ligne, chaque ligne de code peut être testée entièrement et rapidement. Lorsque le logiciel est modifié, le système déclenchera automatiquement chaque lien de test un par un jusqu'à ce que la norme de test embarqué sûre soit atteinte avant d'entrer dans le véhicule. -phase de test en boucle et phase de test en boucle. Si des problèmes sont détectés au cours de la phase de test routier, la prochaine série de modifications du code sera effectuée et le cycle suivant commencera. Après des séries de boucles fermées, les capacités de conduite autonome continuent de s’améliorer.
Tests hors ligne
Hors ligne fait référence aux tests qui n'incluent pas le véhicule. La plupart du travail est effectué en laboratoire. Cette étape comprend les tests de modèle dans la boucle (Model in the Loop, MIL), les logiciels dans la boucle (Software in the Loop, SIL) et le matériel dans la boucle (Hardware in the Loop, HIL).
Les tests de modèle dans la boucle utilisent des ensembles de données à grande échelle pour évaluer avec précision les modèles d'algorithmes de base tels que la perception, la prédiction, le positionnement et le contrôle. Ils mesurent les changements dans les capacités du modèle à l'aide de divers indicateurs après l'évaluation du modèle et les exposent. algorithmes à un stade précoce grâce à l’exploration automatisée de problèmes et de BadCase pour éviter d’être reportés sur des processus de test ultérieurs.
Dans la phase de test du logiciel en boucle, les tests de simulation sont un maillon clé du système de test de conduite autonome. En versant des données massives d'essais routiers dans le système de simulation, l'effet du nouvel algorithme est vérifié de manière répétée. régression. Dans le même temps, un grand nombre de scénarios extrêmes sont construits dans le système de simulation, et un seul scénario est automatiquement transformé en scénarios à grande échelle grâce à l'expansion des paramètres pour améliorer la couverture des tests. En outre, la plate-forme de simulation dispose également d'un système de mesure sophistiqué qui peut déterminer automatiquement les problèmes de collision, les problèmes d'infraction au code de la route, les problèmes somatosensoriels et les problèmes d'itinéraire déraisonnables qui surviennent pendant le processus de simulation.
Dans la phase de test matériel dans la boucle, les logiciels et le matériel sont intégrés pour tester la compatibilité et la fiabilité des systèmes logiciels et matériels. Habituellement, une panne matérielle se produit avec une certaine probabilité et un certain degré de contingence. Au cours de la phase de test du matériel en boucle, des milliers de scénarios réels sont restaurés sur la base d'une combinaison de matériel réel et virtuel, et la conduite autonome est testée. 24 heures sur 24. Le système exerce une pression pour simuler les performances et la stabilité du système dans différentes conditions de limite de ressources (par exemple : ressources GPU insuffisantes, utilisation excessive du processeur). Dans le même temps, un grand nombre de défauts matériels sont simulés à ce stade pour tester la réponse du système en cas de défauts matériels, tels qu'une panne matérielle, une panne de courant, une perte de trame, des anomalies d'interface en amont et en aval, etc., afin de garantir que le système répond aux exigences de sécurité fonctionnelle ISO26262.
Test du véhicule dans la boucle
La phase de test du véhicule dans la boucle effectuera d'abord des tests sur banc, et diverses fonctions de contrôle de la ligne de véhicule, des tests de performance et de stabilité seront effectués sur le banc pour assurer une conduite autonome Le système peut contrôler le véhicule comme prévu. Après avoir terminé le test de contrôle électronique du véhicule, la phase VIL entrera dans un lieu fermé et construira un scénario virtuel et réel basé sur des routes réelles pour tester les performances du système de conduite autonome sur des véhicules réels.
Tests routiers en boucle
Après avoir réussi les étapes de test hors ligne et de test en boucle du véhicule (chaque lien est soumis à des normes strictes de réussite aux tests), entrez dans le lieu fermé pour construire une véritable scène permettant de tester les capacités de conduite autonome et la sécurité du véhicule. Le site d'essai fermé couvre les routes et autoroutes urbaines courantes, y compris les routes droites, les courbes, les intersections, les pentes, les tunnels et les parkings. En outre, divers scénarios basse fréquence sont construits grâce à des équipements de test tels que des mannequins et de fausses voitures. De tels scénarios à faible fréquence existent sur les routes sociales, mais ils se produisent moins fréquemment et ne sont pas faciles à vérifier pleinement sur les routes ouvertes. Par exemple, des vélos circulant en sens inverse, des piétons sortant brusquement, de l'eau sur la chaussée, etc.
Les essais sur route ouverte sont la dernière étape des essais sur route et une étape importante que les véhicules autonomes doivent franchir pour terminer les tests et l'évaluation. Les tests sur route ouverte sont effectués étape par étape. Habituellement, les systèmes les plus récents sont déployés sur un petit nombre de véhicules à des fins de test, puis déployés sur une flotte plus importante après avoir confirmé la sécurité. En déployant des véhicules autonomes à grande échelle pour des tests et des vérifications continus sur des routes réelles, une boucle fermée continue de scénarios routiers réels et de capacités de conduite autonome sera formée, de sorte que les véhicules autonomes continueront à s'améliorer en termes d'intelligence, de sécurité, etc., progressivement. se rapprochant du niveau des véhicules autonomes. La capacité d’atteindre des milliers de foyers.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Comment annuler la suppression de l'écran d'accueil sur iPhone
Apr 17, 2024 pm 07:37 PM
Comment annuler la suppression de l'écran d'accueil sur iPhone
Apr 17, 2024 pm 07:37 PM
Vous avez supprimé quelque chose d'important de votre écran d'accueil et vous essayez de le récupérer ? Vous pouvez remettre les icônes d’applications à l’écran de différentes manières. Nous avons discuté de toutes les méthodes que vous pouvez suivre et remettre l'icône de l'application sur l'écran d'accueil. Comment annuler la suppression de l'écran d'accueil sur iPhone Comme nous l'avons mentionné précédemment, il existe plusieurs façons de restaurer cette modification sur iPhone. Méthode 1 – Remplacer l'icône de l'application dans la bibliothèque d'applications Vous pouvez placer une icône d'application sur votre écran d'accueil directement à partir de la bibliothèque d'applications. Étape 1 – Faites glisser votre doigt sur le côté pour trouver toutes les applications de la bibliothèque d'applications. Étape 2 – Recherchez l'icône de l'application que vous avez supprimée précédemment. Étape 3 – Faites simplement glisser l'icône de l'application de la bibliothèque principale vers le bon emplacement sur l'écran d'accueil. Voici le schéma d'application
 Le rôle et l'application pratique des symboles fléchés en PHP
Mar 22, 2024 am 11:30 AM
Le rôle et l'application pratique des symboles fléchés en PHP
Mar 22, 2024 am 11:30 AM
Le rôle et l'application pratique des symboles fléchés en PHP En PHP, le symbole fléché (->) est généralement utilisé pour accéder aux propriétés et méthodes des objets. Les objets sont l'un des concepts de base de la programmation orientée objet (POO) en PHP. Dans le développement actuel, les symboles fléchés jouent un rôle important dans le fonctionnement des objets. Cet article présentera le rôle et l'application pratique des symboles fléchés et fournira des exemples de code spécifiques pour aider les lecteurs à mieux comprendre. 1. Le rôle du symbole flèche pour accéder aux propriétés d'un objet. Le symbole flèche peut être utilisé pour accéder aux propriétés d'un objet. Quand on instancie une paire
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
 FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
La détection de cibles est un problème relativement mature dans les systèmes de conduite autonome, parmi lesquels la détection des piétons est l'un des premiers algorithmes à être déployés. Des recherches très complètes ont été menées dans la plupart des articles. Cependant, la perception de la distance à l’aide de caméras fisheye pour une vue panoramique est relativement moins étudiée. En raison de la distorsion radiale importante, la représentation standard du cadre de délimitation est difficile à mettre en œuvre dans les caméras fisheye. Pour alléger la description ci-dessus, nous explorons les conceptions étendues de boîtes englobantes, d'ellipses et de polygones généraux dans des représentations polaires/angulaires et définissons une métrique de segmentation d'instance mIOU pour analyser ces représentations. Le modèle fisheyeDetNet proposé avec une forme polygonale surpasse les autres modèles et atteint simultanément 49,5 % de mAP sur l'ensemble de données de la caméra fisheye Valeo pour la conduite autonome.
 Du débutant au compétent : explorez différents scénarios d'application de la commande Linux tee
Mar 20, 2024 am 10:00 AM
Du débutant au compétent : explorez différents scénarios d'application de la commande Linux tee
Mar 20, 2024 am 10:00 AM
La commande Linuxtee est un outil de ligne de commande très utile qui peut écrire la sortie dans un fichier ou envoyer la sortie à une autre commande sans affecter la sortie existante. Dans cet article, nous explorerons en profondeur les différents scénarios d'application de la commande Linuxtee, du débutant au compétent. 1. Utilisation de base Tout d'abord, jetons un coup d'œil à l'utilisation de base de la commande tee. La syntaxe de la commande tee est la suivante : tee[OPTION]...[FILE]...Cette commande lira les données de l'entrée standard et enregistrera les données dans
 Tueur de production de masse ! P-Mapnet : En utilisant la carte de basse précision SDMap précédente, les performances de cartographie sont violemment améliorées de près de 20 points !
Mar 28, 2024 pm 02:36 PM
Tueur de production de masse ! P-Mapnet : En utilisant la carte de basse précision SDMap précédente, les performances de cartographie sont violemment améliorées de près de 20 points !
Mar 28, 2024 pm 02:36 PM
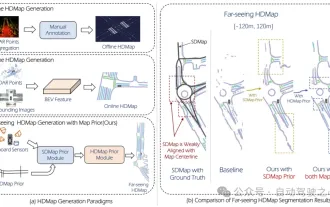
Comme indiqué ci-dessus, l'un des algorithmes utilisés par les systèmes de conduite autonome actuels pour se débarrasser de la dépendance aux cartes de haute précision consiste à tirer parti du fait que les performances de perception sur de longues distances sont encore médiocres. À cette fin, nous proposons P-MapNet, où le « P » se concentre sur la fusion des cartes a priori pour améliorer les performances du modèle. Plus précisément, nous exploitons les informations préalables dans SDMap et HDMap : d'une part, nous extrayons les données SDMap faiblement alignées d'OpenStreetMap et les encodons en termes indépendants pour prendre en charge l'entrée. Il existe un problème de faible alignement entre l'entrée strictement modifiée et la carte HD+ réelle. Notre structure basée sur le mécanisme d'attention croisée peut se concentrer de manière adaptative sur le squelette SDMap et apporter des améliorations significatives des performances ;
