
 Périphériques technologiques
IA
Utilisant Transformer comme ordinateur à usage général, il peut également exécuter des algorithmes d'apprentissage en contexte. Cette recherche est très imaginative.
Périphériques technologiques
IA
Utilisant Transformer comme ordinateur à usage général, il peut également exécuter des algorithmes d'apprentissage en contexte. Cette recherche est très imaginative.
Utilisant Transformer comme ordinateur à usage général, il peut également exécuter des algorithmes d'apprentissage en contexte. Cette recherche est très imaginative.

Transformer est devenu un choix populaire pour diverses tâches d'apprentissage automatique et a obtenu de bons résultats, alors comment peut-il être utilisé autrement ? Des chercheurs dotés d’une grande imagination souhaitent en effet l’utiliser pour concevoir des ordinateurs programmables !

Les auteurs de cet article sont issus de l'Université de Princeton et de l'Université du Wisconsin. Il est intitulé "Les transformateurs en boucle en tant qu'ordinateurs programmables" et vise à explorer comment utiliser Transformer pour implémenter des ordinateurs généraux.
Plus précisément, les auteurs proposent un cadre pour utiliser les réseaux de transformateurs comme ordinateurs à usage général en les programmant avec des poids spécifiques et en les plaçant dans des boucles. Dans ce cadre, la séquence d'entrée agit comme une carte perforée, composée d'instructions et de mémoire pour la lecture/écriture des données.
Les auteurs ont démontré qu'un nombre constant de couches d'encodeurs peuvent simuler des blocs de calcul de base. À l’aide de ces éléments de base, ils ont simulé un petit ordinateur à jeu d’instructions. Cela leur a permis de mapper l'algorithme itératif sur un programme pouvant être exécuté par un transformateur en boucle à 13 couches. Ils montrent comment ce transformateur peut émuler une calculatrice de base, une bibliothèque d'algèbre linéaire de base et un algorithme d'apprentissage en contexte utilisant la rétropropagation, guidé par ses entrées. Ce travail met en évidence la polyvalence des mécanismes d’attention et démontre que même les transformateurs superficiels peuvent exécuter des programmes à part entière à usage général.
Vue d'ensemble du papier
Transformer (TF) est devenu un choix populaire pour diverses tâches d'apprentissage automatique et a obtenu des résultats de pointe sur de nombreux problèmes dans des domaines tels que le traitement du langage naturel et la vision par ordinateur. L'une des principales raisons du succès de Transformer réside dans sa capacité à capturer les relations d'ordre supérieur et les dépendances à long terme grâce à des mécanismes d'attention. Cela permet à TF de modéliser des informations contextuelles et la rend plus efficace dans des tâches telles que la traduction automatique et la modélisation linguistique, où Transformer surpasse systématiquement les autres méthodes.
Les modèles de langage avec des centaines de milliards de paramètres, tels que GPT-3 (paramètres 175B) et PaLM (paramètres 540B), ont atteint des performances de pointe sur de nombreuses tâches de traitement du langage naturel. Il est intéressant de noter que certains de ces grands modèles de langage (LLM) peuvent également effectuer un apprentissage en contexte (ICL), en adaptant et en exécutant des tâches spécifiques à la volée, sur la base d'une courte invite et de quelques exemples. Les capacités ICL des LLM sont disponibles sans avoir à les former et permettent à ces grands modèles d'effectuer efficacement de nouvelles tâches sans mettre à jour les pondérations.
Étonnamment, grâce à ICL, LLM peut effectuer des tâches algorithmiques et des inférences, et [Nye et al [2021], Wei et al. [2022c], Lewkowycz et al. Zhou et al. [2022]] et d’autres ont prouvé sa faisabilité. Les travaux de [Zhou et al. [2022] ] et d'autres démontrent que LLM peut effectuer avec succès des opérations d'addition sur des cas d'utilisation inconnus lorsqu'on lui donne une invite avec un algorithme d'addition multi-bits et quelques exemples d'addition. Ces résultats montrent que LLM peut exécuter des commandes pré-instruites sur des entrées données au moment de l'inférence, sur la base de principes algorithmiques, comme s'il interprétait le langage naturel comme du code.
Il existe des preuves que Transformer peut simuler des machines de Turing avec une profondeur suffisante ou des liens récursifs entre les couches d'attention [Pérez et al. [2021], Pérez et al. Cela démontre le potentiel des réseaux Transformer pour suivre précisément les instructions algorithmiques spécifiées par l’entrée. Cependant, ces constructions sont relativement générales et ne permettent pas de comprendre en profondeur comment créer un Transformer capable d'effectuer des tâches algorithmiques spécifiques.
Cependant, une conception plus professionnelle permet à TF d'exécuter des programmes plus avancés. Par exemple, [Weiss et al. [2021]] ont conçu un modèle de calcul et un langage de programmation qui mappent des commandes simples de sélection et d'agrégation pour indexer les jetons d'entrée. Ce langage peut être utilisé pour créer une variété d'algorithmes intéressants, tels que le comptage de jetons, le tri, la création d'histogrammes et l'identification des langages Dyck-k. Les programmes écrits en langage RASP (Restricted Access Sequence Processing Language) peuvent ensuite être mappés dans des réseaux Transformer, dont la taille évolue généralement en fonction de la taille du programme.
Une autre étude démontre une méthode de sélection des poids du modèle Transformer à utiliser comme algorithme d'optimisation pour l'apprentissage dynamique de modèles de régression linéaire, en effectuant un entraînement implicite au moment de l'inférence en fonction des données d'entraînement en entrée. Ces méthodes nécessitent généralement un nombre de couches proportionnel au nombre d'itérations de l'algorithme d'apprentissage et sont limitées à une seule fonction de perte et à un seul ensemble de modèles.
La possibilité de programmer des modèles Transformer pour émuler les calculs abstraits des machines de Turing, des commandes spécialisées pour des langages comme RASP et des algorithmes spécifiques pour ICL, mettent en évidence le potentiel des réseaux Transformer en tant qu'ordinateurs programmables polyvalents.
Les recherches de l'auteur visent à explorer cette perspective prometteuse et à révéler comment le mécanisme Attention peut simuler un ordinateur à usage général inspiré de l'architecture du jeu d'instructions.
Les transformateurs en tant qu'ordinateurs programmables
Dans cet article, les auteurs montrent que les réseaux de transformateurs peuvent simuler des algorithmes et des programmes complexes en les codant en dur avec des poids spécifiques et en les plaçant dans une boucle. Les auteurs y sont parvenus en faisant de l'ingénierie inverse pour simuler des blocs de calcul de base, tels que des opérations d'édition sur des séquences d'entrée, des fonctions non linéaires, des appels de fonction, des compteurs de programme et des branches conditionnelles. L'article des auteurs démontre l'importance d'utiliser une seule boucle ou récursivité pour concaténer la séquence de sortie d'un transformateur à son entrée, évitant ainsi le besoin d'un modèle approfondi.

Adresse papier : https://arxiv.org/pdf/2301.13196.pdf
L'auteur y parvient en concevant un Transformer capable d'exécuter une version universelle écrite en une seule instruction Le programme , appelé SUBLEQ (A,B,C), soustrait et branche s'il est inférieur ou égal à zéro. SUBLEQ est un langage à instruction unique qui définit un ordinateur à jeu d'instructions unique (OISC). SUBLEQ se compose de trois opérandes d'adresse mémoire Lors de l'exécution, la valeur de l'adresse mémoire B est soustraite de la valeur de l'adresse mémoire A et le résultat est stocké dans B. Si le résultat de B est inférieur ou égal à 0, passez à l'adresse C, sinon passez à l'instruction suivante. Mais cette instruction définit un ordinateur à usage général.
L'auteur a construit un Transformer explicite qui implémente un programme de type SUBLEQ, une instruction unique plus flexible que l'auteur appelle FLEQ, sous la forme

où f_m peut être obtenu à partir d'un ensemble de fonctions (multiplication matricielle / fonction non linéaire / polynôme, etc.), qui peuvent être codées en dur dans le réseau. La profondeur d'un Transformer en boucle capable d'exécuter un programme FLEQ ne dépend pas de la profondeur du programme ou du nombre de lignes de code, mais plutôt de la profondeur requise pour implémenter une seule instruction FLEQ, qui est constante. Ceci est réalisé en exécutant le transformateur en boucle sur la séquence d'entrée, de la même manière que fonctionne un processeur.
En utilisant ce cadre, les auteurs démontrent la capacité de simuler une variété de fonctions au moment de l'inférence, y compris une calculatrice de base, une bibliothèque d'algèbre linéaire de base (transposition matricielle, multiplication, inversion, itération de puissance) et une ICL implicite qui implémente la rétropropagation. sur un réseau entièrement connecté. La séquence d'entrée ou l'invite agit comme une carte perforée, contenant les instructions que le Transformer doit exécuter, tout en fournissant de l'espace pour stocker et gérer les variables utilisées dans le programme. Les réseaux de Transformateurs utilisés pour réaliser ces procédures ont tous une profondeur inférieure ou égale à 13, et les matrices de poids de tous ces modèles sont fournies. Le théorème suivant résume les principales conclusions de l'auteur :
Théorème 1 : Il existe un Transformateur cyclique de moins de 13 couches, qui peut simuler un ordinateur général (Section 5 de l'article), une calculatrice de base (Section 7 de l'article ), les méthodes numériques d'algèbre linéaire, telles que l'inversion matricielle approximative et l'itération de puissance (section 8 de l'article), et les algorithmes ICL basés sur les réseaux neuronaux (tels que SGD) (section 9 de l'article).

Figure 1 : Diagramme schématique de l'architecture en boucle du Transformer, où la séquence d'entrée stocke les commandes, la mémoire à partir de laquelle les données sont lues/écrites et le bloc-notes où les résultats intermédiaires sont stockés. Les entrées sont traitées par le réseau et les sorties sont utilisées comme nouvelles entrées, permettant au réseau de mettre à jour de manière itérative les états implicites et d'effectuer des calculs complexes.
Les recherches de l'auteur mettent l'accent sur la flexibilité du mécanisme Attention et l'importance d'une boucle unique, qui permet de concevoir des modèles capables de simuler des algorithmes itératifs complexes et d'exécuter des programmes généraux. et a en outre démontré la capacité du modèle Transformer à effectuer efficacement des tâches mathématiques et algorithmiques complexes. Il est concevable que les transformateurs modernes, tels que le GPT-3, utilisent des sous-programmes internes similaires lors de l'exécution de diverses tâches. Dans une certaine mesure, les capacités de ces techniques ou algorithmes spécifiques à un modèle peuvent être éclairées lorsqu'on leur donne des exemples et des explications contextuelles, similaires aux appels de fonction. Cependant, cette hypothèse doit être traitée avec prudence, car la façon dont les auteurs ont conçu la structure ne ressemble en rien à la façon dont les modèles de langage du monde réel sont formés.
Les auteurs espèrent que leurs recherches encourageront de nouvelles recherches sur le potentiel des mécanismes d'attention et la capacité des modèles de langage à exécuter des instructions algorithmiques. La conception proposée par les auteurs peut aider à déterminer la taille minimale du réseau Transformer requise pour effectuer une tâche algorithmique spécifique. De plus, les auteurs espèrent que leurs résultats contribueront à inspirer le développement de méthodes visant à améliorer la capacité de formation de modèles de langage en exploitant des réseaux Transformer plus petits et issus de l'ingénierie inverse pour accomplir des tâches algorithmiques spécifiques.
Création d'un module Transformer pour l'informatique générale
Pour utiliser le réseau Transformer pour construire un cadre informatique général, un bloc de calcul spécialisé est requis. Assemblez ces blocs pour créer la fonctionnalité finale souhaitée. Ce qui suit se concentre sur les différentes opérations que la couche Transformer peut effectuer. Ces opérations serviront de base à la création de routines et d’algorithmes plus complexes. Ces opérations sont destinées à être interopérables les unes avec les autres, tirant parti de la capacité d'Attention à effectuer diverses tâches, telles que la génération de matrices de permutation approximatives et l'approximation de fonctions générales via des fonctions sigmoïdes.

Figure 2 : Diagramme schématique de trois blocs Transformer utilisés comme blocs de construction pour la mise en œuvre d'un petit ordinateur à jeu d'instructions. Ces blocs gèrent les opérations d'édition dans la séquence d'entrée (telles que le déplacement ou la copie d'un bloc à un autre), le suivi du compteur de programme et l'exécution de sauts de compteur de programme lorsque les conditions spécifiées sont remplies.
Encodage de position, compteur de programme et pointeur de données
Transformer doit généralement exécuter un algorithme itératif ou exécuter une série de commandes. Pour y parvenir, l'auteur utilise un compteur de programme qui parcourt les commandes. Le compteur contient un code pour l'emplacement où la prochaine commande est stockée. De plus, les commandes peuvent avoir des pointeurs de données pointant vers les emplacements de données que la commande doit lire et écrire. Le compteur de programme et le pointeur de données utilisent le même codage de position évoqué dans le paragraphe précédent.

Le schéma de codage positionnel de l'auteur peut également être utilisé pour pointer vers des emplacements de données spécifiques pour la lecture ou l'écriture, ce qui est abordé dans la section suivante. Ceci est réalisé en utilisant le même vecteur binaire que le codage de position pour le compteur de programme et le pointeur de données. De plus, cette technique de pointage vers des emplacements de données spécifiques permet aux Transformers de lire/écrire efficacement des données pendant l'exécution d'un algorithme ou d'une séquence de commandes pour lequel il a été conçu.
Lecture/écriture : copiez les données et les instructions vers ou depuis le bloc-notes

Figure 3 : Diagramme schématique de l'opération de lecture. La flèche montre le bloc de commande copié à partir de la partie d'entrée affectée à la commande scratchpad. Une instruction est un ensemble de pointeurs. Les codes de position et les compteurs sont utilisés pour suivre quel contenu est copié et où.
Le lemme suivant indique que la commande pointée par le compteur du programme ou les données à l'emplacement spécifié dans la commande actuelle peuvent être copiées dans le bloc-notes pour des calculs ultérieurs. L'emplacement du compteur de programme se trouve généralement directement sous le contenu du bloc-notes, mais peut être modifié arbitrairement. Le maintenir dans une position spécifique tout au long du calcul permet de maintenir la structure bien organisée.
Le lemme suivant explique qu'un vecteur v stocké dans un bloc-notes peut être copié vers un emplacement spécifié en mémoire, comme spécifié par le bloc-notes lui-même. Cela permet aux données d'être transférées du bloc-notes vers un emplacement spécifique de la mémoire pour une utilisation ou un stockage ultérieur.

Figure 4 : Diagramme schématique de l'opération d'écriture. La flèche montre que le bloc de données est copié du bloc-notes vers l'emplacement spécifié dans la section d'entrée allouée à la mémoire. Le codage positionnel est utilisé pour suivre les emplacements cibles et garantir que les données sont écrites dans le bon emplacement mémoire.

Branche conditionnelle
Dans cette partie, l'auteur implémente une instruction de branchement conditionnel qui évalue une condition et place le compteur du programme à un emplacement spécifié si la condition est vraie, ou Incrémentez le compteur du programme de 1 lorsque la condition est fausse. La commande
a la forme : si mem[a]≤0, alors allez à i, où mem[a] est la valeur à une position dans la partie mémoire de la séquence d'entrée. Cette commande comporte deux parties : juger de l'inégalité et modifier le compteur du programme.
Simule un ordinateur universel à jeu d'instructions unique
SUBLEQ Transformer
Mavaddat et Parhami avaient démontré dès 1988 qu'il existe une instruction et que tout programme informatique peut être transformé en un programme composé d'instanciations de cette consigne. Une variante de cette instruction est SUBLEQ, qui peut accéder à différents registres ou emplacements mémoire.
Le fonctionnement de SUBLEQ est simple. Il accède à deux registres en mémoire, récupère la différence de leur contenu et la stocke dans l'un des registres, puis si le résultat est négatif, il passe à une autre ligne de code prédéfinie ou continue avec l'instruction suivante de la ligne en cours. Un ordinateur conçu pour exécuter des programmes SUBLEQ est appelé ordinateur à jeu d’instructions unique et est un ordinateur à usage général, c’est-à-dire qu’il est complet de Turing s’il a accès à une mémoire infinie.

Ce qui suit décrit la construction d'un transformateur en boucle qui peut exécuter des programmes écrits avec un jeu d'instructions spécifique. Transformer garde une trace des lignes de code, des emplacements de mémoire et des compteurs de programme, en utilisant la partie mémoire de l'entrée comme registres de mémoire et la partie commande comme lignes de code/instructions. Le registre temporaire permet d'enregistrer les ajouts et les pointeurs impliqués dans chaque instruction, lecture, écriture, opérations de branchement conditionnel, etc.

Figure 5 : Représentation graphique du bloc d'instruction OISC implémenté. Les deux premiers blocs transfèrent les données/commandes au bloc-notes, les deuxième et troisième effectuent la soustraction et stockent le résultat, tandis que le dernier exécute la commande if goto qui complète l'instruction.
FLEQ : Un ordinateur basé sur l'attention plus flexible
Dans cette section, l'auteur présente FLEQ, qui est une promotion de SUBLEQ et définit un ordinateur à jeu d'instructions réduit plus flexible. Ce jeu d'instructions supplémentaires implicites est basé sur une version plus avancée de SUBLEQ et permet d'implémenter plusieurs fonctions dans le même réseau Transformer. Les auteurs utilisent le terme FLEQ pour désigner les instructions, le langage et les ordinateurs basés sur l'attention qu'il définit.
FLEQ est conçu pour permettre la mise en œuvre d'algorithmes complexes tels que la multiplication matricielle, les calculs de racine carrée, les fonctions d'activation, etc. en générant des fonctions plus générales que la simple soustraction.
Cycle d'exécution informatique basé sur l'Attention. À chaque itération du transformateur de boucle, une instruction est extraite du jeu d'instructions dans l'entrée en fonction du compteur de programme. L'instruction est ensuite copiée dans le bloc-notes. En fonction de la fonction à implémenter, différents emplacements de blocs fonctionnels sont utilisés pour enregistrer localement les résultats de la fonction. Une fois le résultat calculé, il est recopié vers l’emplacement mémoire spécifié fourni par l’instruction.
Le cycle d'exécution est similaire à celui de l'ordinateur à jeu d'instructions unique (OISC) de la section précédente. La principale différence est que pour chaque instruction, vous pouvez choisir parmi une liste de fonctions présélectionnées, qui sont saisies de manière arbitraire. tableau, Tels que les matrices, les vecteurs et les scalaires.
Saisissez le format de la séquence. Comme le montre la figure 6, l'entrée X du transformateur de boucle peut exécuter un programme composé d'une série d'instructions FLEQ (X se compose de trois parties : registre temporaire, mémoire et instructions).
Format de blocs fonctionnels basés sur Transformer. Chaque bloc fonctionnel est situé dans la partie inférieure gauche de l'entrée X, comme le montre la figure 6.

Figure 6 : Structure de la saisie
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
L'article de StableDiffusion3 est enfin là ! Ce modèle est sorti il y a deux semaines et utilise la même architecture DiT (DiffusionTransformer) que Sora. Il a fait beaucoup de bruit dès sa sortie. Par rapport à la version précédente, la qualité des images générées par StableDiffusion3 a été considérablement améliorée. Il prend désormais en charge les invites multithèmes, et l'effet d'écriture de texte a également été amélioré et les caractères tronqués n'apparaissent plus. StabilityAI a souligné que StableDiffusion3 est une série de modèles avec des tailles de paramètres allant de 800M à 8B. Cette plage de paramètres signifie que le modèle peut être exécuté directement sur de nombreux appareils portables, réduisant ainsi considérablement l'utilisation de l'IA.
 Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Le premier article pilote et clé présente principalement plusieurs systèmes de coordonnées couramment utilisés dans la technologie de conduite autonome, et comment compléter la corrélation et la conversion entre eux, et enfin construire un modèle d'environnement unifié. L'objectif ici est de comprendre la conversion du véhicule en corps rigide de caméra (paramètres externes), la conversion de caméra en image (paramètres internes) et la conversion d'image en unité de pixel. La conversion de 3D en 2D aura une distorsion, une traduction, etc. Points clés : Le système de coordonnées du véhicule et le système de coordonnées du corps de la caméra doivent être réécrits : le système de coordonnées planes et le système de coordonnées des pixels Difficulté : la distorsion de l'image doit être prise en compte. La dé-distorsion et l'ajout de distorsion sont compensés sur le plan de l'image. 2. Introduction Il existe quatre systèmes de vision au total : système de coordonnées du plan de pixels (u, v), système de coordonnées d'image (x, y), système de coordonnées de caméra () et système de coordonnées mondiales (). Il existe une relation entre chaque système de coordonnées,
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un rôle important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contrôle de la planification en aval. La tâche de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer ! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus tôt possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R : Regardez d’abord l’enquête, p
 DualBEV : dépassant largement BEVFormer et BEVDet4D, ouvrez le livre !
Mar 21, 2024 pm 05:21 PM
DualBEV : dépassant largement BEVFormer et BEVDet4D, ouvrez le livre !
Mar 21, 2024 pm 05:21 PM
Cet article explore le problème de la détection précise d'objets sous différents angles de vue (tels que la perspective et la vue à vol d'oiseau) dans la conduite autonome, en particulier comment transformer efficacement les caractéristiques de l'espace en perspective (PV) en vue à vol d'oiseau (BEV). implémenté via le module Visual Transformation (VT). Les méthodes existantes sont globalement divisées en deux stratégies : la conversion 2D en 3D et la conversion 3D en 2D. Les méthodes 2D vers 3D améliorent les caractéristiques 2D denses en prédisant les probabilités de profondeur, mais l'incertitude inhérente aux prévisions de profondeur, en particulier dans les régions éloignées, peut introduire des inexactitudes. Alors que les méthodes 3D vers 2D utilisent généralement des requêtes 3D pour échantillonner des fonctionnalités 2D et apprendre les poids d'attention de la correspondance entre les fonctionnalités 3D et 2D via un transformateur, ce qui augmente le temps de calcul et de déploiement.
 Le premier modèle mondial de génération de vidéos de scènes de conduite autonomes multi-vues DrivingDiffusion : nouvelles idées pour les données et la simulation BEV
Oct 23, 2023 am 11:13 AM
Le premier modèle mondial de génération de vidéos de scènes de conduite autonomes multi-vues DrivingDiffusion : nouvelles idées pour les données et la simulation BEV
Oct 23, 2023 am 11:13 AM
Quelques réflexions personnelles de l'auteur Dans le domaine de la conduite autonome, avec le développement de sous-tâches/solutions de bout en bout basées sur BEV, les données d'entraînement multi-vues de haute qualité et la construction de scènes de simulation correspondantes sont devenues de plus en plus importantes. En réponse aux problèmes des tâches actuelles, la « haute qualité » peut être divisée en trois aspects : des scénarios à longue traîne dans différentes dimensions : comme les véhicules à courte portée dans les données sur les obstacles et les angles de cap précis lors du découpage des voitures, et les données sur les lignes de voie. . Scènes telles que des courbes avec des courbures différentes ou des rampes/fusions/fusions difficiles à capturer. Celles-ci reposent souvent sur de grandes quantités de données collectées et sur des stratégies complexes d’exploration de données, qui sont coûteuses. Valeur réelle 3D - image hautement cohérente : l'acquisition actuelle des données BEV est souvent affectée par des erreurs d'installation/calibrage du capteur, des cartes de haute précision et l'algorithme de reconstruction lui-même. cela m'a amené à
 GSLAM | Une architecture générale et un benchmark
Oct 20, 2023 am 11:37 AM
GSLAM | Une architecture générale et un benchmark
Oct 20, 2023 am 11:37 AM
J'ai soudainement découvert un article vieux de 19 ans GSLAM : A General SLAM Framework and Benchmark open source code : https://github.com/zdzhaoyong/GSLAM Accédez directement au texte intégral et ressentez la qualité de ce travail ~ 1 Technologie SLAM abstraite a remporté de nombreux succès récemment et a attiré de nombreuses entreprises de haute technologie. Cependant, la question de savoir comment s'interfacer avec les algorithmes existants ou émergents pour effectuer efficacement des analyses comparatives en termes de vitesse, de robustesse et de portabilité reste une question. Dans cet article, une nouvelle plateforme SLAM appelée GSLAM est proposée, qui fournit non seulement des capacités d'évaluation, mais fournit également aux chercheurs un moyen utile de développer rapidement leurs propres systèmes SLAM.
 'Minecraft' se transforme en une ville IA et les habitants des PNJ jouent comme de vraies personnes
Jan 02, 2024 pm 06:25 PM
'Minecraft' se transforme en une ville IA et les habitants des PNJ jouent comme de vraies personnes
Jan 02, 2024 pm 06:25 PM
Veuillez noter que cet homme carré fronça les sourcils, pensant à l'identité des « invités non invités » devant lui. Il s’est avéré qu’elle se trouvait dans une situation dangereuse, et une fois qu’elle s’en est rendu compte, elle a rapidement commencé une recherche mentale pour trouver une stratégie pour résoudre le problème. Finalement, elle a décidé de fuir les lieux, de demander de l'aide le plus rapidement possible et d'agir immédiatement. En même temps, la personne de l'autre côté pensait la même chose qu'elle... Il y avait une telle scène dans "Minecraft" où tous les personnages étaient contrôlés par l'intelligence artificielle. Chacun d’eux a un cadre identitaire unique. Par exemple, la jeune fille mentionnée précédemment est une coursière de 17 ans mais intelligente et courageuse. Ils ont la capacité de se souvenir, de penser et de vivre comme des humains dans cette petite ville de Minecraft. Ce qui les anime est une toute nouvelle,
 Revoir! Fusion profonde de modèles (LLM/modèle de base/apprentissage fédéré/mise au point, etc.)
Apr 18, 2024 pm 09:43 PM
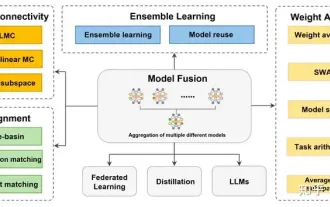
Revoir! Fusion profonde de modèles (LLM/modèle de base/apprentissage fédéré/mise au point, etc.)
Apr 18, 2024 pm 09:43 PM
Le 23 septembre, l'article « DeepModelFusion:ASurvey » a été publié par l'Université nationale de technologie de la défense, JD.com et l'Institut de technologie de Pékin. La fusion/fusion de modèles profonds est une technologie émergente qui combine les paramètres ou les prédictions de plusieurs modèles d'apprentissage profond en un seul modèle. Il combine les capacités de différents modèles pour compenser les biais et les erreurs des modèles individuels pour de meilleures performances. La fusion profonde de modèles sur des modèles d'apprentissage profond à grande échelle (tels que le LLM et les modèles de base) est confrontée à certains défis, notamment un coût de calcul élevé, un espace de paramètres de grande dimension, l'interférence entre différents modèles hétérogènes, etc. Cet article divise les méthodes de fusion de modèles profonds existantes en quatre catégories : (1) « Connexion de modèles », qui relie les solutions dans l'espace de poids via un chemin de réduction des pertes pour obtenir une meilleure fusion de modèles initiale.
