
 Périphériques technologiques
IA
Produit conjointement par Qingbei ! Une enquête pour comprendre les tenants et les aboutissants du 'Transformer+Reinforcement Learning'
Périphériques technologiques
IA
Produit conjointement par Qingbei ! Une enquête pour comprendre les tenants et les aboutissants du 'Transformer+Reinforcement Learning'
Produit conjointement par Qingbei ! Une enquête pour comprendre les tenants et les aboutissants du 'Transformer+Reinforcement Learning'

Depuis sa sortie, le modèle Transformer est rapidement devenu une architecture neuronale courante dans les contextes d'apprentissage supervisé dans les domaines du traitement du langage naturel et de la vision par ordinateur.
Bien que l'engouement pour Transformer ait commencé à balayer le domaine de l'Apprentissage par renforcement, en raison des caractéristiques de RL lui-même, telles que le besoin de fonctionnalités uniques, la conception de l'architecture, etc., la combinaison actuelle de Transformer et l'apprentissage par renforcement n'est pas fluide et son chemin de développement manque également d'articles pertinents pour fournir un résumé complet.
Récemment, des chercheurs de l'Université Tsinghua, de l'Université de Pékin et de Tencent ont publié conjointement un document de recherche sur la combinaison de Transformer et de l'apprentissage par renforcement, examinant systématiquement la motivation et l'historique de développement de l'utilisation de Transformer dans l'apprentissage par renforcement.

Lien papier : https://arxiv.org/pdf/2301.03044.pdf
L'article classe les résultats des travaux connexes existants et mène des discussions approfondies sur chaque sous-domaine. les perspectives d'avenir de cette direction de recherche sont résumées.
Transformer avec RL
L'apprentissage par renforcement (RL) fournit une forme mathématique pour la prise de décision séquentielle, permettant au modèle d'obtenir automatiquement un comportement intelligent.
RL fournit un cadre général pour le contrôle basé sur l'apprentissage. Avec l'introduction des réseaux de neurones profonds, la généralité de l'apprentissage par renforcement profond (DRL) a également fait de grands progrès ces dernières années, mais des problèmes d'efficacité des échantillons ont entravé le DRL A. large gamme d'applications dans le monde réel.
Afin de résoudre ce problème, un mécanisme efficace consiste à introduire un biais inductif dans le cadre DRL. Le plus important est le choix des architectures d'approximation de fonctions, telles que le réseau neuronal de l'agent DRL.
Cependant, la question du choix de la conception d'architecture en DRL est encore sous-explorée par rapport à la conception d'architecture en apprentissage supervisé (SL), et la plupart des travaux existants sur l'architecture RL sont (semi-)supervisés. Inspirés par le succès des communautés d'apprentissage.
Par exemple, une pratique courante pour gérer les entrées basées sur des images de grande dimension dans DRL consiste à introduire des réseaux de neurones convolutifs (CNN) ; une autre pratique courante pour gérer l'observabilité partielle consiste à introduire des réseaux de neurones récurrents (RNN) ;
Ces dernières années, l'architecture Transformer a révolutionné le paradigme d'apprentissage dans un large éventail de tâches SL et a montré des performances supérieures à celles de CNN et RNN. Par exemple, l'architecture Transformer peut modéliser des dépendances plus longues et offre d'excellentes performances.
Inspiré par le succès de SL, l'intérêt de l'industrie pour l'application de Transformer dans l'apprentissage par renforcement s'est accru, ce qui remonte à un article de 2018, dans lequel le mécanisme d'auto-attention était utilisé pour le raisonnement relationnel de la représentation structurée de l'état. .
Après cela, de nombreux chercheurs ont commencé à essayer d'appliquer l'auto-attention à l'apprentissage de la représentation afin d'extraire les relations entre les entités, ce qui peut conduire à un meilleur apprentissage politique.

En plus de l'apprentissage de la représentation d'état, des travaux antérieurs ont également utilisé Transformer pour capturer la dépendance temporelle de plusieurs étapes afin de traiter les problèmes d'observabilité partielle.
Récemment, le RL hors ligne a attiré l'attention en raison de sa capacité à utiliser des ensembles de données hors ligne à grande échelle. Les résultats de recherches connexes montrent également que l'architecture Transformer peut être directement utilisée comme modèle pour la prise de décision séquentielle et peut être généralisée à. plusieurs tâches et domaines.
Le but de ce document de recherche est de présenter le domaine des transformateurs en apprentissage par renforcement (TransformRL).

Bien que Transformer ait été considéré comme le modèle de base pour la plupart des recherches SL actuelles, il est encore moins exploré dans la communauté RL. En fait, par rapport au champ SL, l'utilisation de Transformer comme approximateur de fonction dans RL doit résoudre différents problèmes :
1 Les données de formation de l'agent RL sont généralement fonction de la politique actuelle, qui est dans le. le processus d’apprentissage du Transformer entraînera la non-stationnarité.
2. Les algorithmes RL existants sont généralement très sensibles aux choix de conception au cours du processus de formation, y compris l'architecture et la capacité du réseau.
3. Les architectures basées sur des transformateurs souffrent souvent de coûts de calcul et de mémoire élevés, ce qui signifie que la formation et l'inférence sont lentes et coûteuses.
Par exemple, dans certains cas d'intelligence artificielle dans les jeux, l'efficacité de la génération d'échantillons affecte grandement les performances de formation, en fonction du coût de calcul du réseau de politiques RL et du réseau de valeurs.
L'avenir de TransformRL
L'article passe brièvement en revue les progrès de Transformers pour RL. Ses avantages incluent principalement :
1 Les transformateurs peuvent être utilisés comme un module puissant dans RL, comme un module de représentation ou un monde. modèle ;
2. Transformer peut être utilisé comme décideur de séquence ;
3.
Étant donné que Transformer a montré de solides performances dans la communauté plus large de l'intelligence artificielle, les chercheurs estiment que la combinaison de Transformer et de RL est une direction de recherche prometteuse. Voici quelques perspectives d'avenir et questions ouvertes sur cette direction.
Combinant l'apprentissage par renforcement et l'apprentissage (auto)supervisé
En suivant le développement de TransformRL, vous constaterez que sa méthode de formation couvre à la fois l'apprentissage RL et l'apprentissage (auto-)supervisé.
Lorsqu'elle est utilisée comme module de représentation formé dans un framework RL traditionnel, l'optimisation de l'architecture Transformer est généralement instable. Le paradigme d'apprentissage (auto)supervisé peut éliminer le problème mortel de la triade lors de l'utilisation de Transformers pour résoudre des problèmes de prise de décision grâce à la modélisation de séquences.
Dans le cadre de l'apprentissage (auto)supervisé, la performance de la politique est profondément contrainte par la qualité des données hors ligne, et le compromis clair entre exploitation et exploration n'existe plus, combinant donc RL dans l'apprentissage Transformer Avec l’apprentissage (auto)supervisé, de meilleures stratégies peuvent être apprises.
Certains travaux ont tenté des solutions de pré-formation supervisée et de réglage fin pour la participation à la RL, mais dans le cadre de stratégies relativement fixes, l'exploration sera limitée, ce qui est également l'un des goulots d'étranglement à résoudre.
De plus, dans cette optique, les tâches utilisées pour l'évaluation des performances sont également relativement simples. Transfomer peut-il étendre cet apprentissage (auto)supervisé à des ensembles de données plus vastes, à des environnements plus complexes et à des applications du monde réel qui méritent également d'être explorées plus en profondeur ?
De plus, les chercheurs espèrent que les travaux futurs fourniront davantage d’informations théoriques et empiriques sur les conditions dans lesquelles un tel apprentissage (auto)supervisé devrait bien fonctionner.

Connecter l'apprentissage en ligne et hors ligne via Transformer
Entrer dans le RL hors ligne est une étape importante pour TransformRL, mais en fait, tirer parti de Transformer pour capturer les dépendances dans les séquences de décision et faire abstraction des stratégies, principalement indissociable du support des données hors ligne considérables utilisées.
Cependant, pour certaines tâches de prise de décision, se débarrasser des cadres en ligne n'est pas réalisable dans les applications pratiques.
D'une part, il n'est pas si simple d'obtenir des données d'experts sur certaines tâches ; d'autre part, certains environnements sont ouverts (comme Minecraft), ce qui signifie que les stratégies doivent constamment être ajustées pour faire face à des situations inconnues. situations lors d’interactions en ligne. Voir la tâche.
Par conséquent, les chercheurs estiment qu’il est nécessaire de connecter l’apprentissage en ligne et l’apprentissage hors ligne.
La plupart des progrès de recherche après Decision Transformer se concentrent sur les cadres d'apprentissage hors ligne et certains travaux tentent d'adopter le paradigme de la pré-formation hors ligne et du réglage fin en ligne. Cependant, le changement de distribution dans le réglage fin en ligne existe toujours dans les algorithmes RL hors ligne, et les chercheurs espèrent résoudre ce problème grâce à certaines conceptions spéciales du transformateur de décision.
De plus, comment former un transformateur de décision en ligne à partir de zéro est une question ouverte intéressante.
Structure de Transformer adaptée aux problèmes de prise de décision
La structure actuelle de Transformer dans la série de méthodes Decision Transformer est principalement Vanilla Transformer, qui a été initialement conçu pour les séquences de texte et peut avoir certaines fonctionnalités qui ne conviennent pas pour la prise de décision Nature du problème.
Par exemple, est-il approprié d'utiliser un mécanisme d'auto-attention vanille pour les séquences de trajectoires ? Les différents éléments d’une séquence de décision ou les différentes parties du même élément doivent-ils être distingués lors de l’intégration positionnelle ?
De plus, comme il existe de nombreuses variantes de représentation des trajectoires sous forme de séquences dans différents algorithmes de transformateur de décision, la manière de choisir parmi elles fait encore défaut de recherche systématique.
Par exemple, comment choisir des informations d'indice robustes lors du déploiement de tels algorithmes dans l'industrie ?
Et le Transformer Vanilla est également une structure coûteuse en termes de calcul, ce qui la rend coûteuse à la fois dans les étapes de formation et d'inférence, et a une empreinte mémoire élevée, ce qui limite également la longueur des dépendances qu'il peut capturer.
Afin d'atténuer ces problèmes, certains travaux en PNL ont amélioré la structure de Transformer, mais il vaut également la peine d'explorer si une structure similaire peut être utilisée pour les problèmes de prise de décision.
Utilisez Transformers pour implémenter davantage d'agents généraux
L'examen de Transformers pour les agents généralistes dans le document a montré le potentiel de Transformers en tant que stratégie générale.
En fait, la conception de Transformer permet le traitement de plusieurs modalités (telles que des images, des vidéos, du texte et de la parole) en utilisant une approche similaire au traitement des blocs, et démontre une excellente évolutivité vers des réseaux de très grande capacité et d'énormes ensembles de données.
Des travaux récents ont également permis de réaliser des progrès significatifs dans la formation d'agents capables d'effectuer des tâches multimodales et interdomaines.
Cependant, étant donné que ces agents sont formés sur des ensembles de données à grande échelle, il n'est pas encore certain s'ils mémorisent simplement l'ensemble de données et s'ils peuvent généraliser efficacement.
Par conséquent, comment apprendre un agent capable de généraliser à des tâches invisibles sans hypothèses fortes reste une question qui mérite d'être étudiée.
De plus, les chercheurs sont également curieux de savoir si Transformer est suffisamment puissant pour être utilisé pour apprendre un modèle mondial général pouvant être utilisé pour différentes tâches et scénarios.
RL pour Transformers
Bien que l'article ait expliqué comment RL peut bénéficier du modèle Transformer, à l'inverse, l'utilisation de RL pour améliorer la formation Transformer est toujours un problème ouvert intéressant qui n'a pas encore été bien exploré. .
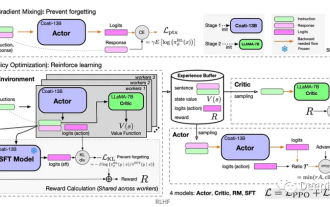
On peut voir que le récent apprentissage par renforcement à partir de la rétroaction humaine (RLHF) peut apprendre un modèle de récompense et utiliser l'algorithme RL pour affiner le transformateur afin de rendre le modèle de langage cohérent avec les intentions humaines.
À l'avenir, les chercheurs pensent que RL peut devenir un outil utile pour améliorer encore les performances de Transformer dans d'autres domaines.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Problèmes de conception des fonctions de récompense dans l'apprentissage par renforcement
Oct 09, 2023 am 11:58 AM
Problèmes de conception des fonctions de récompense dans l'apprentissage par renforcement
Oct 09, 2023 am 11:58 AM
Problèmes de conception de fonctions de récompense dans l'apprentissage par renforcement Introduction L'apprentissage par renforcement est une méthode qui apprend des stratégies optimales grâce à l'interaction entre un agent et l'environnement. Dans l’apprentissage par renforcement, la conception de la fonction de récompense est cruciale pour l’effet d’apprentissage de l’agent. Cet article explorera les problèmes de conception des fonctions de récompense dans l'apprentissage par renforcement et fournira des exemples de code spécifiques. Le rôle de la fonction de récompense et de la fonction de récompense cible constituent une partie importante de l'apprentissage par renforcement et sont utilisés pour évaluer la valeur de récompense obtenue par l'agent dans un certain état. Sa conception aide à guider l'agent pour maximiser la fatigue à long terme en choisissant les actions optimales.
 Apprentissage par renforcement Deep Q-learning utilisant la simulation de bras robotique de Panda-Gym
Oct 31, 2023 pm 05:57 PM
Apprentissage par renforcement Deep Q-learning utilisant la simulation de bras robotique de Panda-Gym
Oct 31, 2023 pm 05:57 PM
L'apprentissage par renforcement (RL) est une méthode d'apprentissage automatique qui permet à un agent d'apprendre comment se comporter dans son environnement par essais et erreurs. Les agents sont récompensés ou punis pour avoir pris des mesures qui conduisent aux résultats souhaités. Au fil du temps, l'agent apprend à prendre des mesures qui maximisent la récompense attendue. Les agents RL sont généralement formés à l'aide d'un processus de décision markovien (MDP), un cadre mathématique pour modéliser des problèmes de décision séquentielle. Le MDP se compose de quatre parties : État : un ensemble d'états possibles de l'environnement. Action : un ensemble d'actions qu'un agent peut entreprendre. Fonction de transition : fonction qui prédit la probabilité de transition vers un nouvel état en fonction de l'état et de l'action actuels. Fonction de récompense : fonction qui attribue une récompense à l'agent pour chaque conversion. L'objectif de l'agent est d'apprendre une fonction politique,
 Technologie d'apprentissage par renforcement profond en C++
Aug 21, 2023 pm 11:33 PM
Technologie d'apprentissage par renforcement profond en C++
Aug 21, 2023 pm 11:33 PM
La technologie d'apprentissage par renforcement profond est une branche de l'intelligence artificielle qui a beaucoup retenu l'attention. Elle a remporté de nombreux concours internationaux et est également largement utilisée dans les assistants personnels, la conduite autonome, l'intelligence des jeux et d'autres domaines. Dans le processus de réalisation d’un apprentissage par renforcement profond, le C++, en tant que langage de programmation efficace et excellent, est particulièrement important lorsque les ressources matérielles sont limitées. L’apprentissage par renforcement profond, comme son nom l’indique, combine les technologies des deux domaines de l’apprentissage profond et de l’apprentissage par renforcement. Pour comprendre simplement, l'apprentissage profond fait référence à l'apprentissage de fonctionnalités à partir de données et à la prise de décisions en créant un réseau neuronal multicouche.
 Une autre révolution dans l'apprentissage par renforcement ! DeepMind propose une « distillation d'algorithmes » : un transformateur d'apprentissage par renforcement pré-entraîné explorable
Apr 12, 2023 pm 06:58 PM
Une autre révolution dans l'apprentissage par renforcement ! DeepMind propose une « distillation d'algorithmes » : un transformateur d'apprentissage par renforcement pré-entraîné explorable
Apr 12, 2023 pm 06:58 PM
Transformer peut être considéré comme l'architecture de réseau neuronal la plus puissante pour les tâches de modélisation de séquence actuelles, et le modèle Transformer pré-entraîné peut utiliser des invites comme conditions ou un apprentissage en contexte pour s'adapter à différentes tâches en aval. La capacité de généralisation des modèles Transformer pré-entraînés à grande échelle a été vérifiée dans plusieurs domaines, tels que la complétion de texte, la compréhension du langage, la génération d'images, etc. Depuis l’année dernière, des travaux pertinents ont prouvé qu’en traitant l’apprentissage par renforcement hors ligne (RL hors ligne) comme un problème de prédiction de séquence, le modèle peut apprendre des politiques à partir de données hors ligne. Mais les approches actuelles soit apprennent les politiques à partir de données qui ne contiennent pas d'apprentissage
 Comment utiliser le langage Go pour mener des recherches sur l'apprentissage par renforcement profond ?
Jun 10, 2023 pm 02:15 PM
Comment utiliser le langage Go pour mener des recherches sur l'apprentissage par renforcement profond ?
Jun 10, 2023 pm 02:15 PM
L'apprentissage par renforcement profond (DeepReinforcementLearning) est une technologie avancée qui combine l'apprentissage en profondeur et l'apprentissage par renforcement. Elle est largement utilisée dans la reconnaissance vocale, la reconnaissance d'images, le traitement du langage naturel et d'autres domaines. En tant que langage de programmation rapide, efficace et fiable, le langage Go peut apporter une aide à la recherche sur l’apprentissage par renforcement profond. Cet article expliquera comment utiliser le langage Go pour mener des recherches sur l'apprentissage par renforcement profond. 1. Installez le langage Go et les bibliothèques associées et commencez à utiliser le langage Go pour un apprentissage par renforcement en profondeur.
 Contrôler un bras robotique à double articulation à l'aide de l'algorithme d'apprentissage par renforcement DDPG d'Actor-Critic
May 12, 2023 pm 09:55 PM
Contrôler un bras robotique à double articulation à l'aide de l'algorithme d'apprentissage par renforcement DDPG d'Actor-Critic
May 12, 2023 pm 09:55 PM
Dans cet article, nous présenterons la formation d'agents intelligents pour contrôler un bras robotique à double articulation dans l'environnement Reacher, un programme de simulation basé sur Unity développé à l'aide de la boîte à outils UnityML-Agents. Notre objectif est d'atteindre la position cible avec une grande précision, nous pouvons donc utiliser ici l'algorithme de pointe DeepDeterministicPolicyGradient (DDPG) conçu pour les espaces d'état et d'action continus. Applications du monde réel Les bras robotisés jouent un rôle essentiel dans les opérations de fabrication, de production, d'exploration spatiale et de recherche et de sauvetage. Il est très important de contrôler le bras du robot avec une grande précision et flexibilité. En employant des techniques d’apprentissage par renforcement, ces systèmes robotiques peuvent être en mesure d’apprendre et d’ajuster leur comportement en temps réel.
 Comment utiliser l'apprentissage par renforcement pour améliorer la fidélisation des utilisateurs de Kuaishou ?
May 07, 2023 pm 06:31 PM
Comment utiliser l'apprentissage par renforcement pour améliorer la fidélisation des utilisateurs de Kuaishou ?
May 07, 2023 pm 06:31 PM
L'objectif principal du système de recommandation de vidéos courtes est de stimuler la croissance des DAU en améliorant la fidélisation des utilisateurs. Par conséquent, la rétention est l’un des principaux indicateurs d’optimisation commerciale de chaque APP. Cependant, la rétention est un retour à long terme après de multiples interactions entre les utilisateurs et le système, et il est difficile de la décomposer en un seul élément ou une seule liste. Par conséquent, il est difficile d'optimiser directement la rétention en utilisant les méthodes traditionnelles par points et par listes. des modèles sages. Les méthodes d'apprentissage par renforcement (RL) optimisent les récompenses à long terme en interagissant avec l'environnement et conviennent pour optimiser directement la fidélisation des utilisateurs. Ce travail modélise le problème d'optimisation de la rétention comme un processus de décision de Markov (MDP) avec une granularité de requête à horizon infini. Chaque fois que l'utilisateur demande au système de recommandation de décider d'une action, il est utilisé pour agréger plusieurs estimations de feedback à court terme (durée de surveillance,
 Apprenez à assembler un circuit imprimé en 20 minutes ! Le framework SERL open source a un taux de réussite de contrôle de précision de 100 % et est trois fois plus rapide que les humains.
Feb 21, 2024 pm 03:31 PM
Apprenez à assembler un circuit imprimé en 20 minutes ! Le framework SERL open source a un taux de réussite de contrôle de précision de 100 % et est trois fois plus rapide que les humains.
Feb 21, 2024 pm 03:31 PM
Désormais, les robots peuvent apprendre des tâches de contrôle de précision en usine. Ces dernières années, des progrès significatifs ont été réalisés dans le domaine des technologies d'apprentissage par renforcement des robots, comme la marche des quadrupèdes, la préhension, la manipulation adroite, etc., mais la plupart d'entre eux se limitent à la phase de démonstration en laboratoire. L’application généralisée de la technologie d’apprentissage par renforcement robotique aux environnements de production réels se heurte encore à de nombreux défis, ce qui limite dans une certaine mesure sa portée d’application dans des scénarios réels. Dans le processus d'application pratique de la technologie d'apprentissage par renforcement, il est nécessaire de surmonter plusieurs problèmes complexes, notamment la configuration du mécanisme de récompense, la réinitialisation de l'environnement, l'amélioration de l'efficacité des échantillons et la garantie de la sécurité des actions. Les experts du secteur soulignent que la résolution des nombreux problèmes liés à la mise en œuvre réelle de la technologie d’apprentissage par renforcement est aussi importante que l’innovation continue de l’algorithme lui-même. Face à ce défi, des chercheurs de l'Université de Californie à Berkeley, de l'Université de Stanford, de l'Université de Washington et
