
 Périphériques technologiques
IA
Analyse complète de quatre stratégies majeures de conduite autonome
Périphériques technologiques
IA
Analyse complète de quatre stratégies majeures de conduite autonome
Analyse complète de quatre stratégies majeures de conduite autonome

Introduction
Les recherches actuelles sur les stratégies de conduite autonome se concentrent toujours sur la mise en œuvre de stratégies spécifiques dans des scénarios spécifiques. Des chercheurs de l'Université Tsinghua ont publié une étude complète lors de la plus grande conférence dans le domaine des transports, l'analysant dans une perspective plus avancée. Stratégie de conduite autonome.
Lorsqu'une voiture autonome rencontre un véhicule venant en sens inverse, doit-elle passer en premier ou attendre pour céder le passage ?
La stratégie de conduite autonome a toujours été une question centrale dans ce domaine, c'est-à-dire comment les véhicules autonomes doivent interagir de manière raisonnable et efficace avec les autres usagers de la route dans les zones de conflit de circulation.
Une stratégie trop radicale ou trop conservatrice aura un impact sur l'efficacité du trafic et constituera même une menace pour la sécurité des passagers.

Les recherches précédentes sur les stratégies de conduite autonome se sont principalement concentrées sur des comportements de conduite détaillés de bas niveau ou sur des situations de circulation spécifiques, c'est-à-dire « une analyse concrète de problèmes spécifiques », ce qui donne lieu à des milliers de if-else dans le code d'ingénierie. , et il y a actuellement un manque de recherche sur les stratégies de conduite avancées.
Bien que les chercheurs manifestent un intérêt croissant pour les stratégies de conduite, il n'existe toujours pas de réponses complètes sur la manière de mettre en œuvre de manière proactive une conduite sûre.
Récemment, les résultats d'une recherche conjointe de l'Université Tsinghua, de l'Institut d'automatisation de l'Académie chinoise des sciences et de l'Institut de recherche Intel China ont été présentés lors du séminaire annuel 2021 organisé par Accident Analysis and Prevention, la principale revue internationale dans le domaine de la sécurité routière (la première revue SSCI dans le domaine des transports, JCR Q1) Des présentations publiques et des rapports oraux ont été présentés lors de la réunion, et l'article a remporté le prix annuel du meilleur article de la revue.

Lien papier : https://www.sciencedirect.com/science/article/abs/pii/S0001457520317577#!
Après avoir analysé plusieurs stratégies de conduite représentatives, l'auteur a proposé trois paires de dimensions caractéristiques importantes dans la mesure de la stratégie de conduite : objectif privilégié, appétit pour le risque et manière collaborative.
Selon ces trois dimensions caractéristiques, les chercheurs ont divisé les stratégies de conduite existantes des véhicules autonomes en quatre types : stratégie de conduite défensive, stratégie de conduite compétitive, stratégie de conduite négociée et stratégie de conduite coopérative, et ont comparé les quatre stratégies. Une comparaison est faite et les directions possibles pour améliorer la conception de stratégies de conduite avancées sont identifiées.
L'auteur estime que face au flux de trafic mixte (voitures autonomes et voitures traditionnelles) qui existera pendant longtemps, un mécanisme de négociation de droit de passage devrait être activement mis en place pour concilier la contradiction entre les intentions individuelles.
L'auteur correspondant de l'article est le Dr Li Zhiheng, qui est actuellement professeur agrégé et directeur de doctorat à la Shenzhen Graduate School de l'Université Tsinghua. A obtenu un doctorat en ingénierie du Département d'automatisation, Département de science et d'ingénierie de contrôle, Université Tsinghua en 2009. Les principales orientations de recherche sont : les systèmes de transport intelligents, les systèmes de contrôle des feux de circulation, la planification de la gestion du trafic, les systèmes de transports publics intelligents, la recherche sur les mégadonnées de transport intelligents, etc. Hébergé et participé à plus de 10 projets au niveau national.
L'avenir de la conduite autonome
Ces dernières années, la technologie de conduite autonome a placé de grands espoirs en elle. On pense généralement qu'elle a le potentiel de remodeler l'ensemble du domaine du transport routier et de résoudre de nombreux problèmes pratiques de circulation, tels que la route. accessibilité, efficacité du trafic, commodité, en particulier sécurité.
Cependant, de plus en plus de chercheurs découvrent peu à peu qu’apprendre aux voitures autonomes à « conduire en toute sécurité » n’est pas facile. Prenons l'exemple des virages à gauche : une étude réalisée en 2010 par le ministère américain des Transports a examiné plus de 2 millions d'accidents et a révélé que les virages à gauche sont vingt fois plus susceptibles de provoquer des accidents que les virages à droite ; dans le domaine de la conduite autonome, l'ingénieur logiciel Nathaniel Fairfield estime que les virages à gauche non protégés sont l'une des choses les plus difficiles de la conduite autonome ; le professeur John Leonard du département de génie mécanique du MIT a également admis que la conduite autonome présente de nombreux défis chaque jour et que les virages à gauche sont presque en tête de liste des problèmes.
L'équipe de recherche de ce travail estime que la cause essentielle des problèmes de sécurité tels que les collisions avec virage à gauche réside dans les différences dans les stratégies macro adoptées par les différents véhicules lors de l'interaction. Différentes des micro-stratégies qui se concentrent sur des scénarios spécifiques ou des comportements de conduite spécifiques, les macro-stratégies sont une abstraction d'éléments typiques du processus décisionnel et sont déterminées par le fondement matériel de la stratégie de conduite autonome et du mécanisme décisionnel.
Par conséquent, ce travail discute principalement des macro-stratégies que les voitures autonomes devraient suivre pour éviter les risques de collision causés par des erreurs de jugement lors des interactions avec d'autres usagers de la route, afin de traverser les zones de conflit de circulation de manière ordonnée.
Dans ce travail, après avoir examiné les recherches existantes, l'équipe de recherche a proposé deux dimensions principales pour mesurer les stratégies de macro-conduite :
- La volonté de collaborer, c'est-à-dire si le sujet conducteur est prêt à renoncer à une partie en échange d'avantages globaux. Intérêts individuels ;
- Préférence pour le risque, c'est-à-dire l'attitude du sujet conducteur face aux risques potentiels apportés par la stratégie de conduite.
Sur la base de l'accent différent mis entre les intérêts généraux (efficacité du trafic environnemental, etc.) et les intérêts individuels (vitesse du vélo), les stratégies de conduite typiques existantes peuvent être divisées en deux catégories : « conduite conflictuelle » et « conduite coopérative ».
Parmi elles, selon différentes préférences en matière de risque, les stratégies de conduite conflictuelles sont divisées en « stratégies de conduite défensive » averses au risque qui préfèrent les indicateurs de sécurité et en « stratégies de conduite compétitive » neutres en matière de risque qui préfèrent les indicateurs de vitesse.
La stratégie de conduite coopérative peut être divisée en « stratégie de conduite négociée » qui ne s'appuie pas sur des équipements de communication active et « stratégie de conduite coopérative » qui s'appuie sur des équipements de communication active (Internet des véhicules, V2V, etc.) (Figure 1).
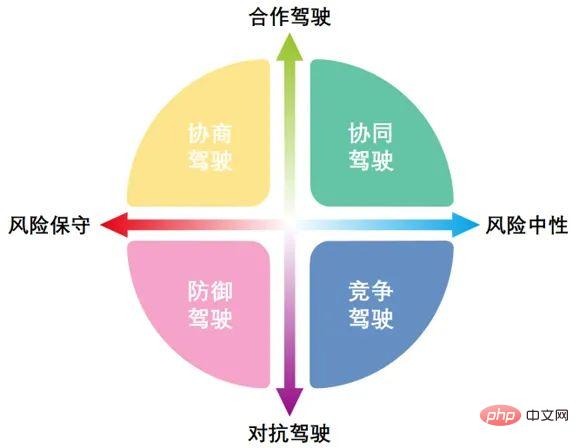
Figure 1 : Quatre types de stratégies de conduite macro typiques
Dans ce travail, l'équipe de recherche a mené des recherches sur le mécanisme de fonctionnement, les tâches principales, la logique d'interaction, le mécanisme de prise de décision et le fondement matériel des quatre ci-dessus. stratégies de conduite typiques.
Plus précisément, une stratégie de conduite défensive est définie comme : adopter des hypothèses irrationnelles sur les autres véhicules (c'est-à-dire croire que la probabilité d'un comportement irrationnel est élevée) et stipuler que les véhicules autonomes prennent des décisions indépendantes dans le but principal d'assurer leur propre sécurité. Stratégie.
Une stratégie de conduite compétitive est définie comme : une stratégie de conduite qui adopte des hypothèses rationnelles sur les autres véhicules (c'est-à-dire estime que la probabilité d'un comportement irrationnel est faible) et stipule que les véhicules autonomes prennent des décisions indépendantes dans le but principal d'améliorer leur propre efficacité. .
La stratégie de conduite négociée est définie comme : une stratégie de conduite dans laquelle les voitures autonomes mènent des négociations raisonnables et une prise de décision conjointe avec d'autres véhicules basées sur la compréhension du comportement de conduite traditionnel en échange d'efficacité et de sécurité.
La stratégie de conduite coopérative est définie comme : avec le soutien de la technologie Internet des véhicules, une stratégie de conduite dans laquelle les véhicules autonomes coopèrent avec d'autres véhicules et acceptent des instructions de répartition unifiées pour parvenir à une optimisation globale.
Ensuite, l'équipe a discuté plus en détail des avantages, des inconvénients et des caractéristiques de ces quatre stratégies.
Avec le développement de la technologie de conduite autonome au cours de ce siècle, les stratégies de conduite défensive ont été proposées pour la première fois car il existe de nombreuses similitudes entre cette stratégie de conduite et les règles de conduite humaine. Les objectifs principaux sont d'éliminer ou de réduire les risques potentiels.
Cependant, le plus gros inconvénient de la conduite défensive est que, afin de prévenir des accidents de la route à faible probabilité, les voitures autonomes peuvent être trop redondantes et conservatrices, ce qui entraîne une diminution de l'efficacité du trafic.
Par exemple, dans la version originale du modèle Responsibility Sensitive Safety (RSS) proposé par l'équipe Intel Mobileye [2], les voitures autonomes doivent maintenir une distance de sécurité suffisamment grande pour faire face à l'éventuel comportement de freinage brusque de la voiture qui vous précède à tout moment (Figure 2).
Des recherches plus approfondies menées par l'équipe ont révélé que lorsque les intentions du véhicule qui précède sont prises en compte dans la prise de décision, les véhicules autonomes peuvent raccourcir la distance qui les suit de plus de trois fois tout en garantissant les exigences de sécurité. Cela montre qu'après l'introduction de l'interaction, une conduite défensive améliorée peut également garantir une certaine efficacité du trafic.
Des résultats de recherche pertinents ont également été publiés publiquement et adoptés par Mobileye[3].
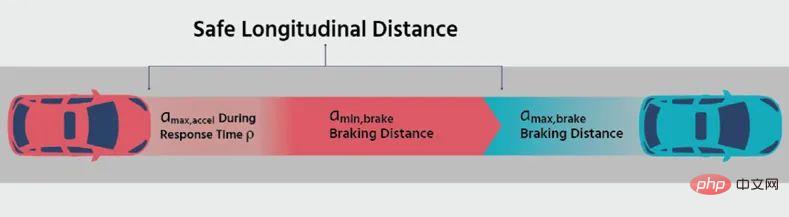
Figure 2 : Les dispositions sur la distance de sécurité dans la version originale du RSS publiée par Mobileye [2]
Avec l'approfondissement de la recherche, divers inconvénients des stratégies de conduite défensive sont progressivement apparus, tels que le manque de longue durée de vie. planification à terme, impact sur l’efficacité du trafic, etc.
Afin de résoudre ces problèmes, le concept « d'apprentissage » est progressivement introduit dans le domaine de la conduite autonome. Les gens tentent d'apprendre aux machines à prendre des décisions entre les bénéfices attendus et les risques potentiels en se basant sur l'expérience des humains.
Sur la base de cette idée, la stratégie de conduite compétitive représentée par le modèle d'apprentissage par renforcement du MIT Deep Traffic (Figure 3) a vu le jour [4].
Guidés par cette stratégie, les véhicules autonomes considèrent le trafic routier comme un processus de « jeu dynamique non coopératif » et sont toujours à la recherche de possibilités pour améliorer l'efficacité de la conduite.
Cependant, ce type de stratégie de conduite est souvent difficile à éviter deux problèmes :
1. Le problème de réalisme causé par la simulation, à savoir le « écart de réalité ». Ce type d'algorithme de prise de décision de conduite doit souvent être exécuté dans un système de simulation, et le processus de formation de l'algorithme est très dépendant du retour d'information sur l'environnement. Il s'agit donc de garantir que le processus d'interaction dans le système de simulation est suffisamment réaliste. question à laquelle les chercheurs doivent répondre ;
2. Rationalité Les risques potentiels découlant des hypothèses augmentent. La recherche a montré qu'à mesure que la formation progresse, puisqu'il y a beaucoup plus d'individus rationnels que d'individus irrationnels dans l'environnement de simulation, les voitures autonomes peuvent « goûter la douceur » des comportements à risque et devenir de plus en plus enclines à adopter des comportements de conduite radicaux[5]. . Cette hypothèse rationnelle peut avoir des conséquences sur les routes réelles en termes de congestion du trafic.
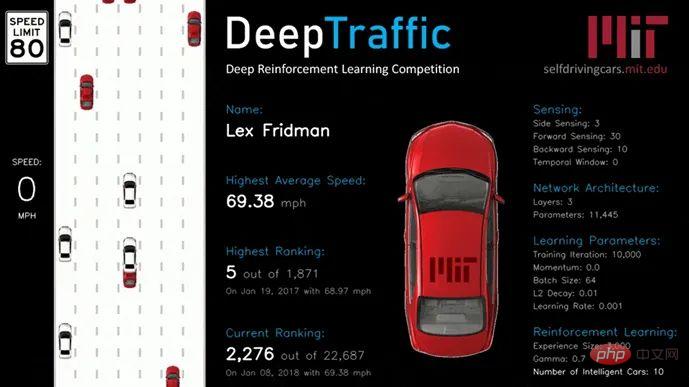
Figure 3 : Modèle de décision de conduite Deep Traffic du MIT [4] (Source de l'image : https://selfdrivingcars.mit.edu/deeptraffic)
Par conséquent, le concept de conduite négociée a été proposé, et sa proposition sera Un mécanisme de négociation de priorité est introduit pour réconcilier les conflits entre les intentions individuelles. L'équipe de recherche a résumé les principes que les véhicules autonomes doivent suivre lors de la négociation de droits de passage avec d'autres véhicules en trois points (Figure 4) [6] :
- Il est nécessaire de gérer les limites de la perception avec prudence ;
- Il est nécessaire de prendre en compte l'interaction entre les véhicules (y compris la communication implicite et la communication active) dans les considérations décisionnelles ;
- Il est nécessaire d'équilibrer ; la sécurité routière et l'efficacité du trafic, c'est-à-dire considérer l'agilité stratégique.
Sur cette base, l'équipe de recherche a publié plusieurs articles expliquant comment prendre des décisions de conduite efficaces basées sur la négociation de priorité dans divers scénarios de circulation typiques [7].
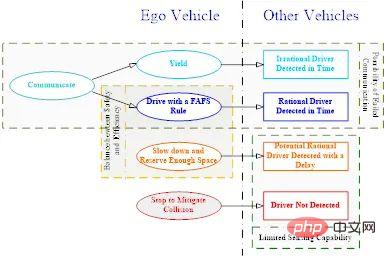
Figure 4 : Trois principes fondamentaux mis en avant dans une conduite sûre [6]
Cependant, la conduite négociée est limitée par la quantité d'informations de communication et n'a pas encore atteint l'utilisation maximale de la capacité routière. Avec la maturité des technologies de communication active et le développement de modèles décisionnels collaboratifs distribués ces dernières années, la conduite collaborative mondiale basée sur l’Internet des véhicules est devenue possible.
L'hypothèse de base de la conduite collaborative est que tous les véhicules routiers communiquent leurs informations d'état au système de contrôle central et se conforment pleinement au plan de manœuvre uniformément attribué par le système de contrôle de mouvement.
Dans cette hypothèse, les véhicules autonomes n'ont plus besoin d'effectuer des prédictions de trajectoire complexes et des évaluations des risques. Ils peuvent utiliser des méthodes d'optimisation ou de recherche pour maximiser l'utilisation des ressources routières avec des coûts de calcul minimes (Figure 5) [8,9 ].

Figure 5 : Comparaison du retard de 20 véhicules passant la même intersection selon différentes stratégies [9]
Énumération : solution optimale globale de conduite collaborative basée sur l'énumération (latence 315,06 s)
MCTS - basée sur la recherche ; La solution optimale approximative de conduite collaborative (délai 316,18 s) ;
FIFO — la solution générale de conduite négociée basée sur des règles (délai 382,54 s)
La réalisation de la conduite collaborative ci-dessus a trois prérequis : du côté du véhicule , la conduite automatique doit être complétée La conduite est remplacée et équipée d'équipements de communication actifs ; au bout de la route, une infrastructure intelligente dense doit être déployée en tant que nœuds de détection et de communication dans le cloud, un réseau de communication et un centre de contrôle à faible latence et haute concurrence ; doit être établi.
Cela signifie également que la conduite collaborative est vouée à échouer à court terme. Nous devons réfléchir sérieusement à la manière de faire face à la réalité de la conduite mixte de voitures autonomes et de voitures à conduite humaine à long terme.
Un problème inquiétant est que les différents constructeurs de voitures autonomes ont leurs propres stratégies de conduite. Cela peut amener certaines voitures autonomes à mal évaluer les stratégies des autres véhicules en fonction de leurs propres stratégies, conduisant ainsi à des accidents. Par conséquent, les chercheurs appellent à parvenir à un consensus au niveau de la stratégie de conduite pour mieux parvenir à une conduite harmonieuse et améliorer la sécurité de conduite.
À mesure que le niveau d’intelligence des machines se rapproche progressivement de celui des humains, la manière dont les machines peuvent coexister harmonieusement avec les humains à une plus grande échelle deviendra l’une des questions scientifiques les plus importantes de ce siècle.
Dans le « Plan de développement de l'intelligence artificielle de nouvelle génération » publié par notre pays, l'idéologie directrice, les objectifs stratégiques et les tâches clés pour le développement de la nouvelle génération d'intelligence artificielle de mon pays en 2030 sont proposés. Parmi eux, l’intelligence artificielle pour la collaboration homme-machine constitue une direction de recherche clé.
La conduite autonome est un domaine représentatif dans le développement de l'intelligence artificielle. La coconduite homme-machine au niveau 2-niveau 5 et diverses collaborations de véhicules au niveau 4-niveau 5 impliquent toutes la recherche sur l'intelligence artificielle sur la collaboration homme-machine. la solution de ces problèmes implique l'intersection de la modélisation comportementale, de l'interaction homme-machine, de la psychologie et d'autres disciplines, et il est nécessaire de recevoir plus d'attention et d'attention.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Écrit ci-dessus et compréhension personnelle de l'auteur Le Gaussiansplatting tridimensionnel (3DGS) est une technologie transformatrice qui a émergé dans les domaines des champs de rayonnement explicites et de l'infographie ces dernières années. Cette méthode innovante se caractérise par l’utilisation de millions de gaussiennes 3D, ce qui est très différent de la méthode du champ de rayonnement neuronal (NeRF), qui utilise principalement un modèle implicite basé sur les coordonnées pour mapper les coordonnées spatiales aux valeurs des pixels. Avec sa représentation explicite de scènes et ses algorithmes de rendu différenciables, 3DGS garantit non seulement des capacités de rendu en temps réel, mais introduit également un niveau de contrôle et d'édition de scène sans précédent. Cela positionne 3DGS comme un révolutionnaire potentiel pour la reconstruction et la représentation 3D de nouvelle génération. À cette fin, nous fournissons pour la première fois un aperçu systématique des derniers développements et préoccupations dans le domaine du 3DGS.
 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
0. Écrit à l'avant&& Compréhension personnelle que les systèmes de conduite autonome s'appuient sur des technologies avancées de perception, de prise de décision et de contrôle, en utilisant divers capteurs (tels que caméras, lidar, radar, etc.) pour percevoir l'environnement et en utilisant des algorithmes et des modèles pour une analyse et une prise de décision en temps réel. Cela permet aux véhicules de reconnaître les panneaux de signalisation, de détecter et de suivre d'autres véhicules, de prédire le comportement des piétons, etc., permettant ainsi de fonctionner en toute sécurité et de s'adapter à des environnements de circulation complexes. Cette technologie attire actuellement une grande attention et est considérée comme un domaine de développement important pour l'avenir des transports. . un. Mais ce qui rend la conduite autonome difficile, c'est de trouver comment faire comprendre à la voiture ce qui se passe autour d'elle. Cela nécessite que l'algorithme de détection d'objets tridimensionnels du système de conduite autonome puisse percevoir et décrire avec précision les objets dans l'environnement, y compris leur emplacement,
 Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Le premier article pilote et clé présente principalement plusieurs systèmes de coordonnées couramment utilisés dans la technologie de conduite autonome, et comment compléter la corrélation et la conversion entre eux, et enfin construire un modèle d'environnement unifié. L'objectif ici est de comprendre la conversion du véhicule en corps rigide de caméra (paramètres externes), la conversion de caméra en image (paramètres internes) et la conversion d'image en unité de pixel. La conversion de 3D en 2D aura une distorsion, une traduction, etc. Points clés : Le système de coordonnées du véhicule et le système de coordonnées du corps de la caméra doivent être réécrits : le système de coordonnées planes et le système de coordonnées des pixels Difficulté : la distorsion de l'image doit être prise en compte. La dé-distorsion et l'ajout de distorsion sont compensés sur le plan de l'image. 2. Introduction Il existe quatre systèmes de vision au total : système de coordonnées du plan de pixels (u, v), système de coordonnées d'image (x, y), système de coordonnées de caméra () et système de coordonnées mondiales (). Il existe une relation entre chaque système de coordonnées,
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un rôle important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contrôle de la planification en aval. La tâche de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer ! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus tôt possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R : Regardez d’abord l’enquête, p
 SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
Titre original : SIMPL : ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Lien article : https://arxiv.org/pdf/2402.02519.pdf Lien code : https://github.com/HKUST-Aerial-Robotics/SIMPL Affiliation de l'auteur : Université des sciences de Hong Kong et technologie Idée DJI Paper : cet article propose une base de référence de prédiction de mouvement (SIMPL) simple et efficace pour les véhicules autonomes. Par rapport au cent agent traditionnel
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
