
 Périphériques technologiques
IA
Richard Sutton a déclaré sans ambages que la rétropropagation convolutive a pris du retard et que les percées de l'IA nécessitent de nouvelles idées : la rétropropagation continue
Périphériques technologiques
IA
Richard Sutton a déclaré sans ambages que la rétropropagation convolutive a pris du retard et que les percées de l'IA nécessitent de nouvelles idées : la rétropropagation continue
Richard Sutton a déclaré sans ambages que la rétropropagation convolutive a pris du retard et que les percées de l'IA nécessitent de nouvelles idées : la rétropropagation continue

La « perte de plasticité » est l'une des lacunes les plus fréquemment critiquées des réseaux de neurones profonds, ce qui est également l'une des raisons pour lesquelles les systèmes d'IA basés sur l'apprentissage profond sont considérés comme incapables de continuer à apprendre.
Pour le cerveau humain, la « plasticité » fait référence à la capacité à générer de nouveaux neurones et de nouvelles connexions entre neurones, ce qui constitue une base importante pour l'apprentissage continu. À mesure que nous vieillissons, la plasticité du cerveau diminue progressivement au détriment de la consolidation de ce que nous avons appris. Les réseaux de neurones sont similaires.
Un exemple frappant est que la formation à démarrage à chaud en 2020 a fait ses preuves : ce n'est qu'en abandonnant ce qui a été initialement appris et en s'entraînant sur l'ensemble des données de manière ponctuelle que l'on peut obtenir des comparaisons. Un bon effet d'apprentissage.
Dans l'apprentissage par renforcement profond (DRL), le système d'IA doit souvent "oublier" tout le contenu précédemment appris par le réseau neuronal, enregistrer seulement une partie du contenu dans le tampon de lecture, puis recommencer de zéro à parvenir à un apprentissage continu. Cette façon de réinitialiser le réseau est également considérée comme la preuve que le deep learning ne peut pas continuer à apprendre.
Alors, comment pouvons-nous garder les systèmes d'apprentissage malléables ?
Récemment, Richard Sutton, le père de l'apprentissage par renforcement, a prononcé un discours intitulé "Maintaining Plasticity in Deep Continual Learning" lors de la conférence CoLLAs 2022, et a proposé une réponse qui, selon lui, pourrait résoudre ce problème : Algorithme de rétropropagation continue ( Backprop continu).
Richard Sutton a d'abord prouvé l'existence d'une perte de plasticité du point de vue de l'ensemble de données, puis a analysé les causes de la perte de plasticité à l'intérieur du réseau neuronal et a finalement proposé l'algorithme de rétropropagation continue comme moyen de résoudre la perte de plasticité. : Réinitialisation d'un petit nombre de neurones de faible utilité, Cette injection continue de diversité peut maintenir indéfiniment la plasticité des réseaux profonds.
Ce qui suit est le texte intégral du discours, qui a été compilé par AI Technology Review sans changer le sens original.
1 L'existence réelle de la perte de plasticité
Le deep learning peut-il vraiment résoudre le problème de l'apprentissage continu ?
La réponse est non, principalement pour les trois points suivants :
- « Insoluble » signifie que comme un réseau linéaire non profond, la vitesse d'apprentissage sera finalement très lente
- utilisé en profondeur ; apprentissage Les méthodes de standardisation professionnelles ne sont efficaces que dans l'apprentissage ponctuel et sont contraires à l'apprentissage continu ;
- La mise en cache de relecture elle-même est une méthode extrême pour admettre que l'apprentissage en profondeur n'est pas réalisable ;
Par conséquent, Nous devons trouver de meilleurs algorithmes adaptés à ce nouveau modèle d'apprentissage et nous débarrasser des limites de l'apprentissage ponctuel.
Tout d'abord, nous utilisons les ensembles de données ImageNet et MNIST pour les tâches de classification afin de réaliser une prédiction de régression, de tester directement l'effet d'apprentissage continu et de prouver l'existence d'une perte de plasticité dans l'apprentissage supervisé.
Test de l'ensemble de données ImageNet
ImageNet est un ensemble de données contenant des millions d'images étiquetées avec des noms. Il comporte 1 000 catégories avec 700 images ou plus par catégorie et est largement utilisé pour l'apprentissage et la prédiction de catégories.
Ci-dessous, une photo d'un requin, sous-échantillonnée à la taille 32*32. Le but de cette expérience est de trouver des changements minimes par rapport aux pratiques d'apprentissage profond. Nous avons divisé les 700 images de chaque catégorie en 600 échantillons d'apprentissage et 100 échantillons de test, puis divisé les 1 000 catégories en deux groupes pour générer une séquence de tâches de classification binaire d'une longueur de 500. Tous les ensembles de données ont été mélangés de manière aléatoire. Après un entraînement pour chaque tâche, nous évaluons la précision du modèle sur l'échantillon de test, l'exécutons 30 fois indépendamment et prenons la moyenne avant d'entrer dans la tâche de classification binaire suivante.
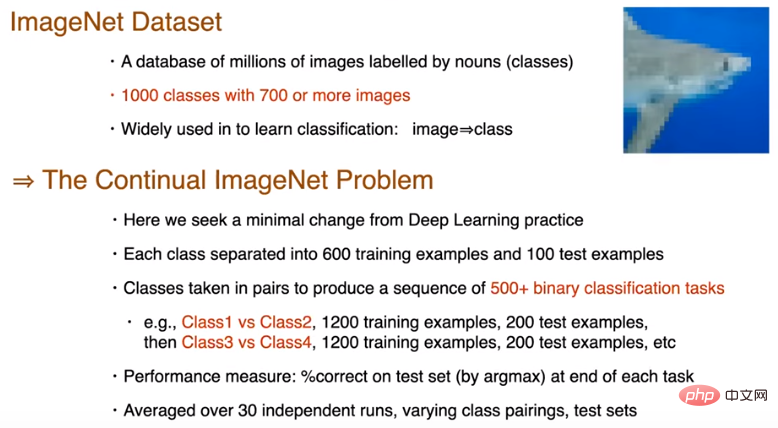
500 tâches de classification partageront le même réseau Afin d'éliminer l'impact de la complexité, le réseau principal sera réinitialisé après le changement de tâche. Nous utilisons un réseau standard, c'est-à-dire 3 couches de convolution + 3 couches entièrement connectées, mais la couche de sortie peut être relativement petite pour l'ensemble de données ImageNet car seules deux catégories sont utilisées dans une tâche. Pour chaque tâche, 100 exemples sont pris sous forme de lot, avec un total de 12 lots et 250 époques de formation. Une seule initialisation est effectuée avant de démarrer la première tâche, en utilisant la distribution de Kaiming pour initialiser les poids. La descente de gradient stochastique basée sur l'impulsion est utilisée pour la perte d'entropie croisée, et la fonction d'activation ReLU est utilisée.
Cela amène à deux questions :
1. Comment la performance va-t-elle évoluer dans la séquence de tâches ?
2. Sur quelle tâche la performance sera-t-elle meilleure ? La première mission initiale est-elle meilleure ? Ou les tâches ultérieures bénéficieront-elles de l’expérience des tâches précédentes ?
La réponse est donnée dans la figure ci-dessous : La performance de l'apprentissage continu est entièrement déterminée par la taille de l'étape de formation et la rétropropagation.
Puisqu'il s'agit d'un problème de classification binaire, la probabilité de chance est de 50 %. La zone ombrée représente l'écart type, et cette différence n'est pas significative. Le benchmark linéaire utilise une couche linéaire pour traiter directement les valeurs des pixels, ce qui n'est pas aussi efficace que la méthode d'apprentissage en profondeur. Cette différence est significative.
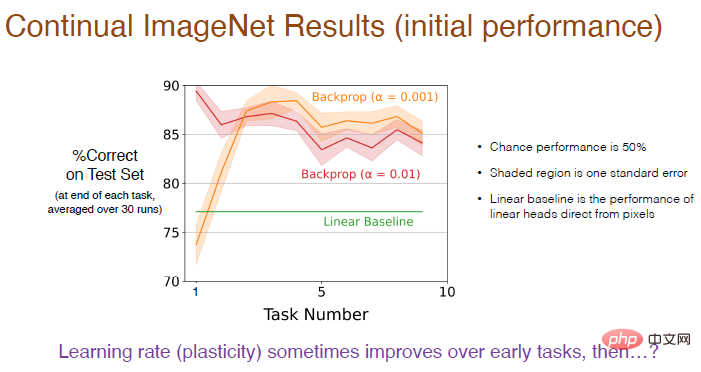
Illustration : L'utilisation d'un taux d'apprentissage plus faible (α=0,001) aura une plus grande précision et les performances s'amélioreront progressivement dans les 5 premières tâches, mais elles montreront une tendance à la baisse à long terme.
Nous avons ensuite augmenté le nombre de tâches à 2000 et analysé plus en détail l'impact du taux d'apprentissage sur l'effet d'apprentissage continu. En moyenne, la précision a été calculée toutes les 50 tâches. Le résultat est présenté ci-dessous.
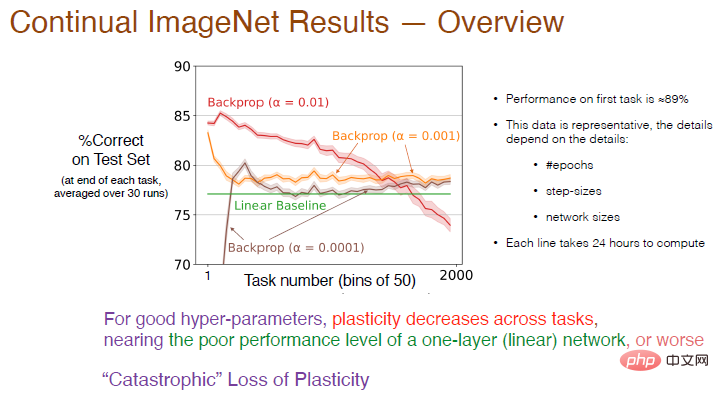
Légende : La précision de la courbe rouge avec α=0,01 sur la première tâche est d'environ 89%. Une fois que le nombre de tâches dépasse 50, la précision diminue à mesure que le nombre de tâches augmente encore, la plasticité. Peu à peu manquante, la précision finale est inférieure à la ligne de base linéaire. Lorsque α = 0,001, la vitesse d'apprentissage ralentit, la plasticité diminue également fortement et la précision n'est que légèrement supérieure à celle du réseau linéaire.
Par conséquent, pour de bons hyperparamètres, la plasticité entre les tâches diminuera et la précision sera inférieure à l'utilisation d'une seule couche de réseaux neuronaux. Ce que montre la courbe rouge est presque une "perte de plasticité catastrophique".
Les résultats de la formation dépendent également de paramètres tels que le nombre d'itérations, le nombre d'étapes et la taille du réseau. Le temps de formation pour chaque courbe de la figure est de 24 heures sur plusieurs processeurs, ce qui peut ne pas être pratique lorsque. faire des expériences systématiques. Nous sélectionnons ensuite l’ensemble de données MNIST pour les tests.
MNIST Dataset Test
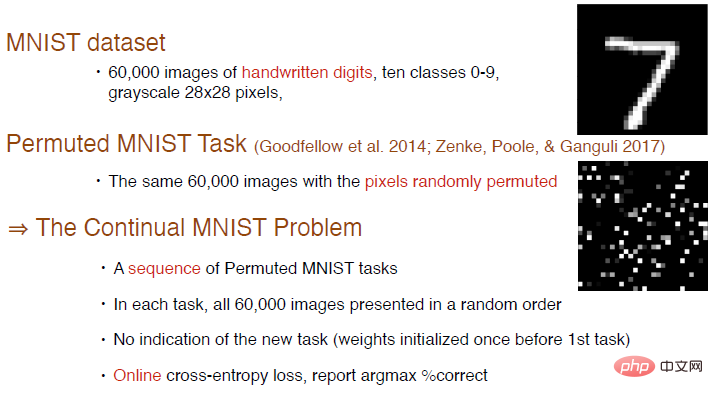
L'ensemble de données MNIST contient un total de 60 000 images de chiffres manuscrits, avec 10 catégories de 0 à 9, et sont 28*28 images en niveaux de gris.
Goodfellow et al. ont créé une nouvelle tâche de test en mélangeant l'ordre ou en disposant les pixels de manière aléatoire. L'image dans le coin inférieur droit est un exemple de l'image organisée générée. dans chaque Dans chaque tâche, 6000 images sont présentées de manière aléatoire. Aucun contenu de tâche n'est ajouté ici et les pondérations du réseau ne sont initialisées qu'une seule fois avant la première tâche. Nous pouvons utiliser la perte d'entropie croisée en ligne pour la formation et continuer à utiliser l'indice de précision pour mesurer l'effet de l'apprentissage continu.
La structure du réseau neuronal est composée de 4 couches entièrement connectées, le nombre de neurones dans les 3 premières couches est de 2000 et le nombre de neurones dans la dernière couche est de 10. Étant donné que les images de l'ensemble de données MNIST sont centrées et mises à l'échelle, aucune opération de convolution n'est effectuée. Toutes les tâches de classification partagent le même réseau, utilisant la descente de gradient stochastique sans impulsion, et les autres paramètres sont les mêmes que ceux testés sur l'ensemble de données ImageNet.
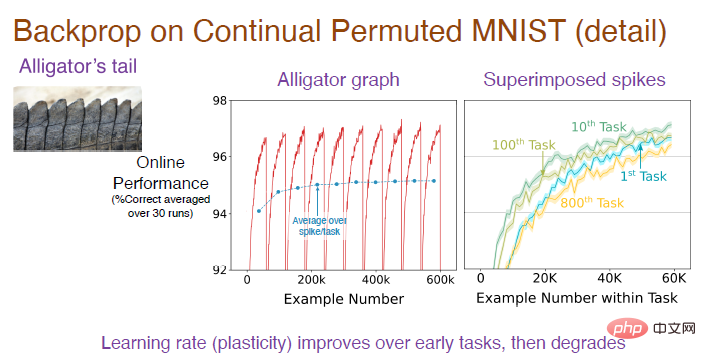
Remarque : L'image du milieu est le résultat moyen après 30 exécutions indépendantes sur la séquence de tâches. Chaque tâche comporte 6 000 échantillons. Puisqu'il s'agit d'une tâche de classification, la précision de la supposition aléatoire au début est de 10 %. les règles d'organisation des images, la précision de la prédiction augmentera progressivement, mais après avoir changé de tâche, la précision chute à 10 %, de sorte que la tendance globale fluctue constamment. L'image de droite montre l'effet d'apprentissage du modèle sur chaque tâche. La précision initiale est de 0. Au fil du temps, l'effet s'améliore progressivement. La précision sur la 10ème tâche est meilleure que sur la 1ère tâche, mais la précision diminue sur la 100ème tâche et la précision sur la 800ème tâche est encore inférieure à la première.
Afin de comprendre l'ensemble du processus, nous devons nous concentrer sur l'analyse de la précision de la partie convexe, puis en faire la moyenne pour obtenir la courbe bleue de l'image intermédiaire. On voit clairement que la précision augmentera progressivement au début puis se stabilisera jusqu'à la 100ème tâche. Alors pourquoi la précision chute-t-elle fortement à la 800e tâche ?
Ensuite, nous avons essayé différentes valeurs de pas sur davantage de séquences de tâches pour observer davantage leurs effets d'apprentissage. Les résultats sont les suivants :
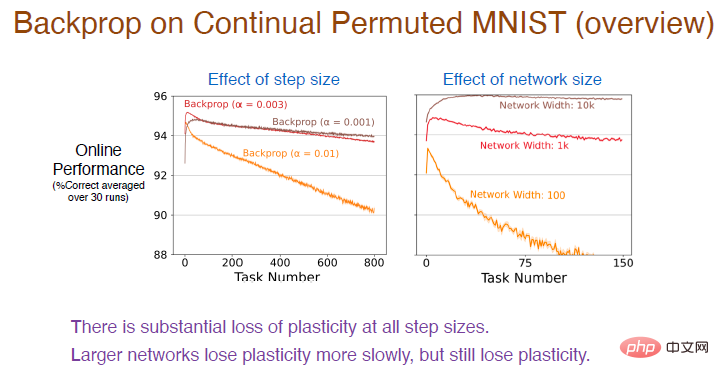
Légende : La courbe rouge utilise la même valeur de pas que l'expérience précédente. La précision diminue en effet régulièrement, et la perte de plasticité est relativement importante.
Dans le même temps, plus le taux d'apprentissage est élevé, plus la plasticité diminue rapidement. Il existe une énorme perte de plasticité pour toutes les valeurs de pas. De plus, le nombre de neurones dans la couche cachée affectera également la précision. Le nombre de neurones dans la courbe brune est de 10 000. En raison de la capacité d'ajustement améliorée du réseau neuronal, la précision diminuera très lentement à ce moment-là. il y aura toujours une perte de plasticité, mais plus la taille du réseau est grande, plus la précision diminuera. Plus la taille est petite, plus la plasticité diminue rapidement.
Alors, depuis l'intérieur du réseau neuronal, pourquoi une perte de plasticité se produit-elle ?
La photo ci-dessous explique pourquoi. On constate qu'une proportion trop élevée de neurones « morts », un poids excessif des neurones et une perte de diversité neuronale sont autant de causes de perte de plasticité.
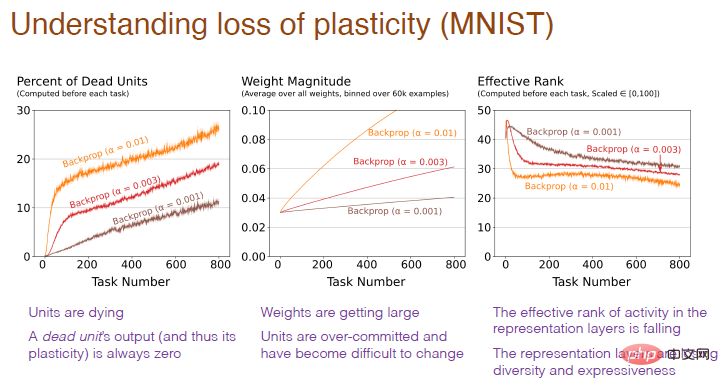
Note du graphique : L'axe horizontal représente toujours le numéro de tâche. L'axe vertical de la première image représente le pourcentage de neurones "morts". Les neurones "morts" font référence à ceux dont la sortie et le gradient sont toujours. 0 Neurones, ne prédisent plus la plasticité du réseau. L'axe vertical du deuxième graphique représente le poids. L'axe vertical du troisième graphique représente le niveau effectif du nombre de neurones cachés restants.
2 Limitations des méthodes existantes
Nous analysons si les méthodes d'apprentissage en profondeur existantes autres que la rétropropagation aideront à maintenir la plasticité.
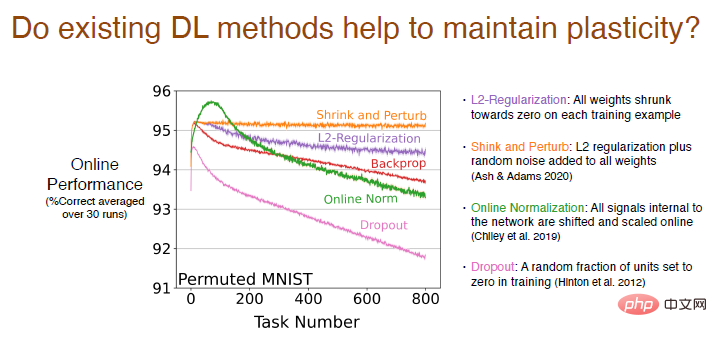
Les résultats montrent que la méthode de régularisation L2 réduira la perte de plasticité, réduisant ainsi les poids à 0, afin qu'elle puisse être ajustée dynamiquement et maintenir la plasticité.
Les méthodes de retrait et de perturbation sont similaires à la régularisation L2. En même temps, du bruit aléatoire est ajouté à tous les poids pour augmenter la diversité, et il n'y a pratiquement aucune perte de plasticité.
Nous avons également essayé d'autres méthodes de standardisation en ligne. Les résultats étaient relativement bons au début, mais la perte de plasticité était importante à mesure que l'apprentissage se poursuivait. Les performances de la méthode Dropout sont encore pires. Nous avons mis aléatoirement une partie des neurones à 0 pour le recyclage et avons constaté que la perte de plasticité augmentait fortement.
Diverses méthodes auront également un impact sur la structure interne du réseau neuronal. L'utilisation d'une méthode de régularisation augmentera le pourcentage de neurones « morts », car lors du processus de réduction des poids à 0, s'ils restent à 0, la sortie sera 0 et les neurones « mourront ». Et le rétrécissement et la perturbation ajoutent du bruit aléatoire aux poids, de sorte qu'il n'y a pas trop de neurones « morts ». La méthode de normalisation comporte également beaucoup de neurones "morts" et elle semble aller dans la mauvaise direction, et Dropout est similaire.
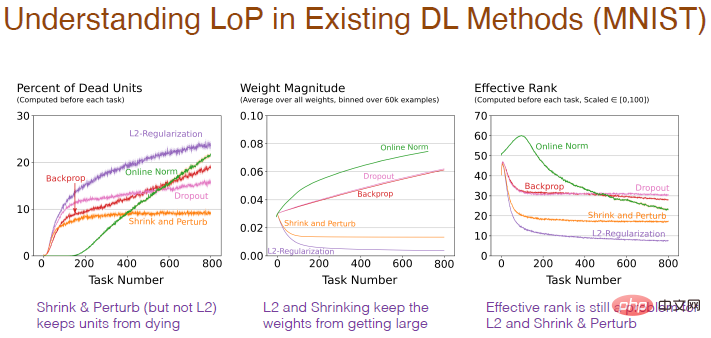
Le résultat de l'évolution du poids avec le nombre de tâches est plus raisonnable. L'utilisation de la régularisation obtiendra un très faible poids et la perturbation ajoutera du bruit sur la base de la régularisation, tandis que la standardisation rendra le résultat plus raisonnable. le poids devient plus grand. Cependant, pour la régularisation, la contraction et la perturbation de L2, le niveau effectif du nombre de neurones cachés est relativement faible, ce qui indique que ses performances en matière de maintien de la diversité sont médiocres, ce qui constitue également un problème.
Problème de régression à évolution lente (SCR)
Toutes nos idées et algorithmes sont dérivés du Problème de régression à évolution lenteExpériences, qui est un nouveau problème idéalisé axé sur l'apprentissage continu.
Dans cette expérience, notre objectif est d'atteindre la fonction objectif formée par un réseau neuronal monocouche avec des poids aléatoires, et les neurones de la couche cachée sont 100 neurones à seuil linéaire.
Nous ne faisons pas de classification, nous générons simplement un nombre, c'est donc un problème de régression. Toutes les 10 000 étapes d'entraînement, nous sélectionnons 1 bit parmi les 15 derniers bits de l'entrée à inverser, il s'agit donc d'une fonction objectif qui évolue lentement.
Notre solution est d'utiliser la même structure de réseau, avec une seule couche cachée de neurones, tout en s'assurant que la fonction d'activation est différentiable, mais nous aurons 5 neurones cachés. Ceci est similaire à RL. La plage d'exploration par l'agent est beaucoup plus petite que l'environnement interactif, il ne peut donc effectuer qu'un traitement approximatif. À mesure que la fonction objectif change, essayez de modifier la valeur approximative, ce qui facilitera la tâche. quelques expériences systématiques.
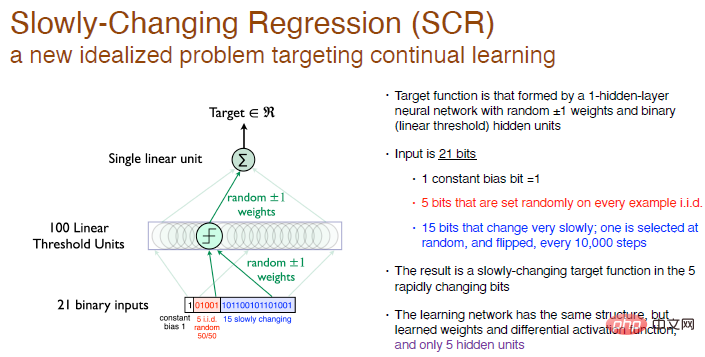
Légende : L'entrée est un nombre binaire aléatoire de 21 bits, le premier bit est l'écart constant d'entrée avec une valeur de 1, les 5 bits du milieu sont des nombres aléatoires indépendants et identiquement distribués, et l'autre 15 bits changent lentement Constant, la sortie est un nombre réel. Les poids sont randomisés à 0 et peuvent être choisis au hasard pour être +1 ou -1.
Nous avons étudié plus en détail l'impact de la modification des valeurs de pas et des fonctions d'activation sur l'effet d'apprentissage. Par exemple, les fonctions d'activation tanh, sigmoïde et relu sont utilisées ici :
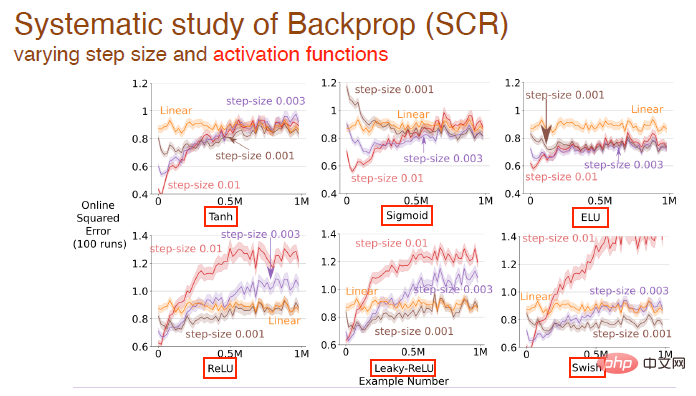
et le formulaire de fonction d'activation. convient à tous les algorithmes Influence de l'effet d'apprentissage :
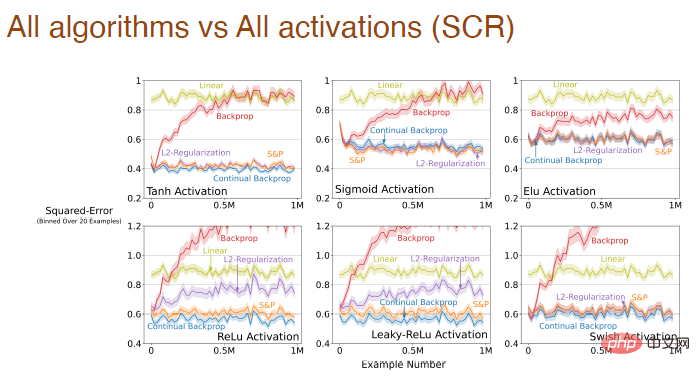
Lorsque la taille du pas et la fonction d'activation changent en même temps, nous avons également effectué une analyse systématique de l'impact de la rétro-propagation d'Adam :
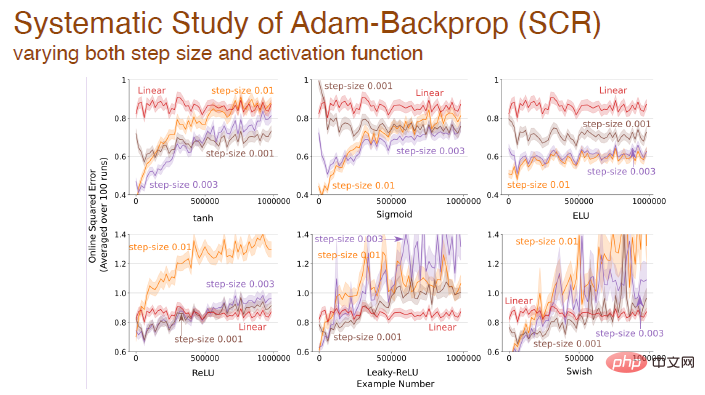
Enfin, en utilisant différents Après avoir activé la fonction, l'erreur change entre différents algorithmes basés sur le mécanisme d'Adam :
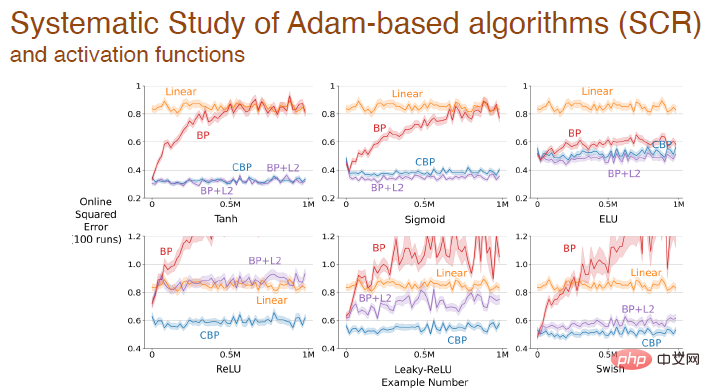
Les résultats expérimentaux ci-dessus montrent que les méthodes d'apprentissage en profondeur ne sont plus adaptées à l'apprentissage continu En cas de rencontre. nouveaux problèmes, apprentissage Le processus deviendra très lent et l'avantage de la profondeur ne sera pas reflété. Les méthodes standardisées d’apprentissage profond ne conviennent qu’à un apprentissage ponctuel. Nous devons améliorer les méthodes d’apprentissage profond pour permettre leur utilisation pour l’apprentissage continu.
3 Rétropropagation continue
L'algorithme de rétropropagation convolutionnelle sera-t-il lui-même un bon algorithme d'apprentissage continu ?
Nous ne le pensons pas.
L'algorithme de rétropropagation par convolution contient principalement deux aspects : l'initialisation avec de petits poids aléatoires et la descente de gradient à chaque pas de temps. Bien qu'il génère de petits nombres aléatoires au début pour initialiser les poids, il ne se répète pas. Idéalement, nous souhaiterions peut-être un algorithme d’apprentissage capable d’effectuer des calculs similaires à tout moment.
Alors, comment faire en sorte que l'algorithme de rétropropagation convolutionnelle apprenne en continu ?
Le moyen le plus simple est de réinitialiser de manière sélective, par exemple, après avoir effectué plusieurs tâches. Mais en même temps, réinitialiser l’ensemble du réseau n’est peut-être pas raisonnable en cas d’apprentissage continu, car cela signifie que le réseau neuronal oublie tout ce qu’il a appris. Il est donc préférable d'initialiser sélectivement une partie du réseau neuronal, par exemple en réinitialisant certains neurones "morts", ou en triant le réseau neuronal en fonction de son utilité et en réinitialisant les neurones ayant une utilité moindre.
L'idée d'une initialisation sélectionnée au hasard est liée à la méthode de génération et de test proposée par Mahmood et Sutton en 2012. Il suffit de générer quelques neurones et de tester leur fonctionnalité. L'algorithme de rétropropagation continue établit la connexion entre ces deux. notions de pont. La méthode de génération et de test présente certaines limites, utilisant une seule couche cachée et un seul neurone de sortie, nous l'étendons à un réseau multicouche qui peut être optimisé avec certaines méthodes d'apprentissage profond.Nous envisageons d'abord de
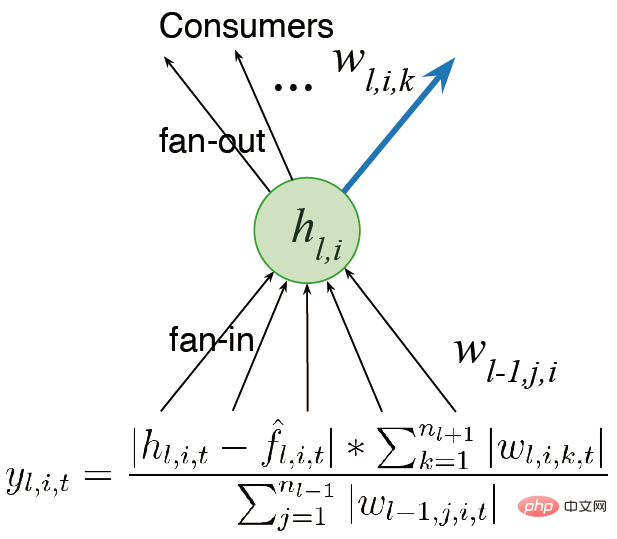
configurer le réseau en plusieurs couches au lieu d'une seule sortie. Des travaux antérieurs mentionnaient le concept d'utilité. Puisqu'il n'y a qu'un seul poids, cette utilité n'est qu'un concept au niveau du poids. Cependant, nous avons plusieurs poids. La généralisation la plus simple consiste à considérer l'utilité au niveau de la somme des poids.
Une autre idée est deconsidérer l'activité des fonctionnalités au lieu de simplement les poids de sortie, afin que nous puissions multiplier la somme des poids par la fonction d'activation moyenne des fonctionnalités, attribuant ainsi différentes proportions. Nous espérons concevoir des algorithmes capables de continuer à apprendre et à fonctionner rapidement. Nous prenons également en compte la plasticité des fonctionnalités lors du calcul de l'utilité. Enfin, la contribution moyenne des fonctionnalités est transférée au biais de sortie, réduisant ainsi l'impact de la suppression des fonctionnalités.
faire une mesure globale de l'utilité, mesurer l'impact des neurones sur l'ensemble de la fonction représentée, et pas seulement se limiter aux poids d'entrée, de sortie mesures locales telles que les poids et les fonctions d'activation ; (2) Nous devons encore améliorer le générateur. Actuellement, nous échantillonnons uniquement à partir de la distribution initiale pour l'initialisation, et nous devons également explorer des méthodes d'initialisation qui peuvent améliorer les performances. Alors, dans quelle mesure la rétropropagation continue réussit-elle à maintenir la plasticité ?
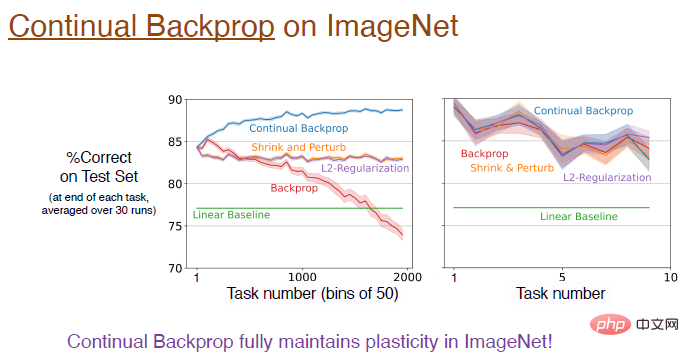
Les résultats expérimentaux montrent que la rétropropagation continue, entraînée à l'aide de l'ensemble de données MNIST aligné en ligne, maintient pleinement la plasticité.
La courbe bleue dans la figure ci-dessous montre ce résultat.
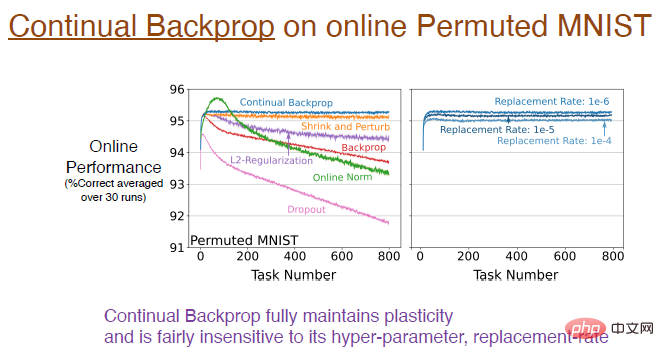 Légende : L'image de droite montre l'impact de différents taux de remplacement sur l'apprentissage continu. Par exemple, un taux de remplacement de 1e-6 signifie remplacer 1/1000000 de représentations à chaque pas de temps. Autrement dit, en supposant qu’il y ait 2 000 caractéristiques, un neurone sera remplacé dans chaque couche toutes les 500 étapes. Cette vitesse de mise à jour est très lente, le taux de remplacement n'est donc pas très sensible aux hyperparamètres et n'affectera pas de manière significative l'effet d'apprentissage.
Légende : L'image de droite montre l'impact de différents taux de remplacement sur l'apprentissage continu. Par exemple, un taux de remplacement de 1e-6 signifie remplacer 1/1000000 de représentations à chaque pas de temps. Autrement dit, en supposant qu’il y ait 2 000 caractéristiques, un neurone sera remplacé dans chaque couche toutes les 500 étapes. Cette vitesse de mise à jour est très lente, le taux de remplacement n'est donc pas très sensible aux hyperparamètres et n'affectera pas de manière significative l'effet d'apprentissage.
Ensuite, nous devons étudier l'impact de la rétropropagation continue sur la structure interne du réseau neuronal. Il n'y a presque pas de neurones "morts" en rétropropagation continue.
Étant donné que l'utilitaire prend en compte l'activation moyenne des fonctionnalités, si un neurone "meurt", il sera immédiatement remplacé. Et comme nous continuons à remplacer les neurones, nous obtenons de nouveaux neurones avec un poids plus faible. Étant donné que les neurones sont initialisés de manière aléatoire, ils conservent en conséquence une représentation et une diversité plus riches.
Ainsi, la rétropropagation continue résout tous les problèmes causés par le manque de plasticité sur l'ensemble de données MNIST. 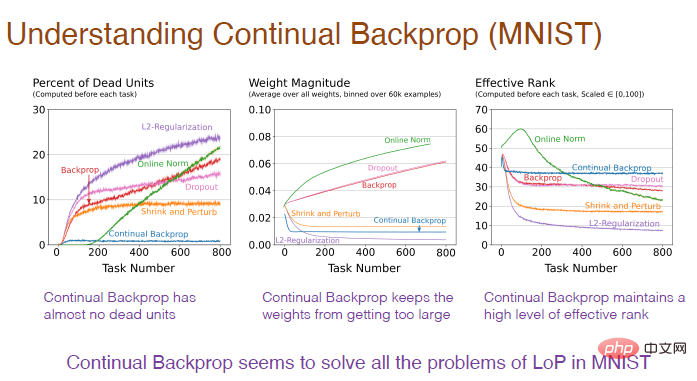
Alors, la rétropropagation continue peut-elle être étendue à des réseaux neuronaux convolutifs plus profonds ?
La réponse est oui ! Sur l'ensemble de données ImageNet, la rétropropagation continue a entièrement préservé la plasticité et la précision finale du modèle était d'environ 89 %. En fait, dans la phase initiale de formation, les performances de ces algorithmes sont équivalentes. Comme mentionné précédemment, le taux de remplacement évolue très lentement, et l'approximation n'est meilleure que lorsque le nombre de tâches est suffisamment grand.
Nous prenons ici le problème de la "Fourmi glissante" comme exemple pour montrer les résultats expérimentaux de l'apprentissage par renforcement.
Le problème « Slippery Ant » est une extension du problème du renforcement non stationnaire et est fondamentalement similaire à l'environnement PyBullet, sauf que la friction entre le sol et l'agent change tous les 10 millions de pas. Nous avons implémenté une version d'apprentissage continu de l'algorithme PPO basée sur la rétropropagation continue, qui peut être initialisée de manière sélective. Les résultats de la comparaison entre l'algorithme PPO et l'algorithme PPO continu sont les suivants.
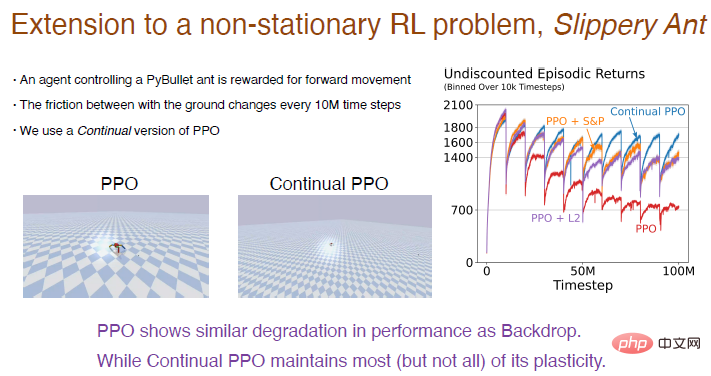
Illustration : L'algorithme PPO fonctionne bien au début, mais au fur et à mesure que l'entraînement progresse, les performances continuent de baisser, ce qui sera atténué après l'introduction de l'algorithme L2 et de l'algorithme de retrait et de perturbation. L’algorithme PPO continu a relativement bien fonctionné, conservant l’essentiel de la plasticité.
Fait intéressant, l'agent formé par l'algorithme PPO ne peut que lutter pour marcher, mais l'agent formé par l'algorithme PPO en continu peut courir très loin.
4 Conclusion
Les réseaux d'apprentissage profond sont principalement optimisés pour un apprentissage ponctuel, dans le sens où ils peuvent échouer complètement lorsqu'ils sont utilisés pour un apprentissage continu. Les méthodes d'apprentissage en profondeur telles que la normalisation et DropOut peuvent ne pas être utiles pour l'apprentissage continu, mais apporter quelques petites améliorations sur cette base, telles que la rétropropagation continue, peut être très efficace.
La rétropropagation continue trie les caractéristiques du réseau en fonction de l'utilité des neurones, en particulier pour les réseaux neuronaux récurrents, il peut y avoir davantage d'améliorations dans la méthode de tri.
L'algorithme d'apprentissage par renforcement utilise l'idée d'itération de politiques. Bien que des problèmes d'apprentissage continu existent, le maintien de la plasticité des réseaux d'apprentissage profond ouvre d'énormes nouvelles possibilités pour le RL et le RL basé sur des modèles.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Au-delà d'ORB-SLAM3 ! SL-SLAM : les scènes de faible luminosité, de gigue importante et de texture faible sont toutes gérées
May 30, 2024 am 09:35 AM
Au-delà d'ORB-SLAM3 ! SL-SLAM : les scènes de faible luminosité, de gigue importante et de texture faible sont toutes gérées
May 30, 2024 am 09:35 AM
Écrit précédemment, nous discutons aujourd'hui de la manière dont la technologie d'apprentissage profond peut améliorer les performances du SLAM (localisation et cartographie simultanées) basé sur la vision dans des environnements complexes. En combinant des méthodes d'extraction de caractéristiques approfondies et de correspondance de profondeur, nous introduisons ici un système SLAM visuel hybride polyvalent conçu pour améliorer l'adaptation dans des scénarios difficiles tels que des conditions de faible luminosité, un éclairage dynamique, des zones faiblement texturées et une gigue importante. Notre système prend en charge plusieurs modes, notamment les configurations étendues monoculaire, stéréo, monoculaire-inertielle et stéréo-inertielle. En outre, il analyse également comment combiner le SLAM visuel avec des méthodes d’apprentissage profond pour inspirer d’autres recherches. Grâce à des expériences approfondies sur des ensembles de données publiques et des données auto-échantillonnées, nous démontrons la supériorité du SL-SLAM en termes de précision de positionnement et de robustesse du suivi.
 CLIP-BEVFormer : superviser explicitement la structure BEVFormer pour améliorer les performances de détection à longue traîne
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer : superviser explicitement la structure BEVFormer pour améliorer les performances de détection à longue traîne
Mar 26, 2024 pm 12:41 PM
Écrit ci-dessus et compréhension personnelle de l'auteur : À l'heure actuelle, dans l'ensemble du système de conduite autonome, le module de perception joue un rôle essentiel. Le véhicule autonome roulant sur la route ne peut obtenir des résultats de perception précis que via le module de perception en aval. dans le système de conduite autonome, prend des jugements et des décisions comportementales opportuns et corrects. Actuellement, les voitures dotées de fonctions de conduite autonome sont généralement équipées d'une variété de capteurs d'informations de données, notamment des capteurs de caméra à vision panoramique, des capteurs lidar et des capteurs radar à ondes millimétriques pour collecter des informations selon différentes modalités afin d'accomplir des tâches de perception précises. L'algorithme de perception BEV basé sur la vision pure est privilégié par l'industrie en raison de son faible coût matériel et de sa facilité de déploiement, et ses résultats peuvent être facilement appliqués à diverses tâches en aval.
 Implémentation d'algorithmes d'apprentissage automatique en C++ : défis et solutions courants
Jun 03, 2024 pm 01:25 PM
Implémentation d'algorithmes d'apprentissage automatique en C++ : défis et solutions courants
Jun 03, 2024 pm 01:25 PM
Les défis courants rencontrés par les algorithmes d'apprentissage automatique en C++ incluent la gestion de la mémoire, le multithread, l'optimisation des performances et la maintenabilité. Les solutions incluent l'utilisation de pointeurs intelligents, de bibliothèques de threads modernes, d'instructions SIMD et de bibliothèques tierces, ainsi que le respect des directives de style de codage et l'utilisation d'outils d'automatisation. Des cas pratiques montrent comment utiliser la bibliothèque Eigen pour implémenter des algorithmes de régression linéaire, gérer efficacement la mémoire et utiliser des opérations matricielles hautes performances.
 Comprendre en un seul article : les liens et les différences entre l'IA, le machine learning et le deep learning
Mar 02, 2024 am 11:19 AM
Comprendre en un seul article : les liens et les différences entre l'IA, le machine learning et le deep learning
Mar 02, 2024 am 11:19 AM
Dans la vague actuelle de changements technologiques rapides, l'intelligence artificielle (IA), l'apprentissage automatique (ML) et l'apprentissage profond (DL) sont comme des étoiles brillantes, à la tête de la nouvelle vague des technologies de l'information. Ces trois mots apparaissent fréquemment dans diverses discussions de pointe et applications pratiques, mais pour de nombreux explorateurs novices dans ce domaine, leurs significations spécifiques et leurs connexions internes peuvent encore être entourées de mystère. Alors regardons d'abord cette photo. On constate qu’il existe une corrélation étroite et une relation progressive entre l’apprentissage profond, l’apprentissage automatique et l’intelligence artificielle. Le deep learning est un domaine spécifique du machine learning, et le machine learning
 Explorez les principes sous-jacents et la sélection d'algorithmes de la fonction de tri C++
Apr 02, 2024 pm 05:36 PM
Explorez les principes sous-jacents et la sélection d'algorithmes de la fonction de tri C++
Apr 02, 2024 pm 05:36 PM
La couche inférieure de la fonction de tri C++ utilise le tri par fusion, sa complexité est O(nlogn) et propose différents choix d'algorithmes de tri, notamment le tri rapide, le tri par tas et le tri stable.
 Super fort! Top 10 des algorithmes de deep learning !
Mar 15, 2024 pm 03:46 PM
Super fort! Top 10 des algorithmes de deep learning !
Mar 15, 2024 pm 03:46 PM
Près de 20 ans se sont écoulés depuis que le concept d'apprentissage profond a été proposé en 2006. L'apprentissage profond, en tant que révolution dans le domaine de l'intelligence artificielle, a donné naissance à de nombreux algorithmes influents. Alors, selon vous, quels sont les 10 meilleurs algorithmes pour l’apprentissage profond ? Voici les meilleurs algorithmes d’apprentissage profond, à mon avis. Ils occupent tous une position importante en termes d’innovation, de valeur d’application et d’influence. 1. Contexte du réseau neuronal profond (DNN) : Le réseau neuronal profond (DNN), également appelé perceptron multicouche, est l'algorithme d'apprentissage profond le plus courant lorsqu'il a été inventé pour la première fois, jusqu'à récemment en raison du goulot d'étranglement de la puissance de calcul. années, puissance de calcul, La percée est venue avec l'explosion des données. DNN est un modèle de réseau neuronal qui contient plusieurs couches cachées. Dans ce modèle, chaque couche transmet l'entrée à la couche suivante et
 L'intelligence artificielle peut-elle prédire la criminalité ? Explorez les capacités de CrimeGPT
Mar 22, 2024 pm 10:10 PM
L'intelligence artificielle peut-elle prédire la criminalité ? Explorez les capacités de CrimeGPT
Mar 22, 2024 pm 10:10 PM
La convergence de l’intelligence artificielle (IA) et des forces de l’ordre ouvre de nouvelles possibilités en matière de prévention et de détection de la criminalité. Les capacités prédictives de l’intelligence artificielle sont largement utilisées dans des systèmes tels que CrimeGPT (Crime Prediction Technology) pour prédire les activités criminelles. Cet article explore le potentiel de l’intelligence artificielle dans la prédiction de la criminalité, ses applications actuelles, les défis auxquels elle est confrontée et les éventuelles implications éthiques de cette technologie. Intelligence artificielle et prédiction de la criminalité : les bases CrimeGPT utilise des algorithmes d'apprentissage automatique pour analyser de grands ensembles de données, identifiant des modèles qui peuvent prédire où et quand les crimes sont susceptibles de se produire. Ces ensembles de données comprennent des statistiques historiques sur la criminalité, des informations démographiques, des indicateurs économiques, des tendances météorologiques, etc. En identifiant les tendances qui pourraient échapper aux analystes humains, l'intelligence artificielle peut donner du pouvoir aux forces de l'ordre.
 Algorithme de détection amélioré : pour la détection de cibles dans des images de télédétection optique haute résolution
Jun 06, 2024 pm 12:33 PM
Algorithme de détection amélioré : pour la détection de cibles dans des images de télédétection optique haute résolution
Jun 06, 2024 pm 12:33 PM
01Aperçu des perspectives Actuellement, il est difficile d'atteindre un équilibre approprié entre efficacité de détection et résultats de détection. Nous avons développé un algorithme YOLOv5 amélioré pour la détection de cibles dans des images de télédétection optique haute résolution, en utilisant des pyramides de caractéristiques multicouches, des stratégies de têtes de détection multiples et des modules d'attention hybrides pour améliorer l'effet du réseau de détection de cibles dans les images de télédétection optique. Selon l'ensemble de données SIMD, le mAP du nouvel algorithme est 2,2 % meilleur que YOLOv5 et 8,48 % meilleur que YOLOX, permettant ainsi d'obtenir un meilleur équilibre entre les résultats de détection et la vitesse. 02 Contexte et motivation Avec le développement rapide de la technologie de télédétection, les images de télédétection optique à haute résolution ont été utilisées pour décrire de nombreux objets à la surface de la Terre, notamment des avions, des voitures, des bâtiments, etc. Détection d'objets dans l'interprétation d'images de télédétection
